基于VSP的地震地质导向方法与应用试验
2020-06-23蔡志东温铁民艾维平
蔡志东,王 赟,温铁民,艾维平,王 冲
(1.中国地质大学(北京)地球探测与信息技术学院,北京100083;2.中国石油集团东方地球物理公司新兴物探开发处,河北涿州072750;3.中国石油集团东方地球物理公司研究院,河北涿州072751;4.中国石油集团钻井工程技术研究院,北京100206)
随着油气开发的不断深化,复杂断块储层、火山岩储层和碳酸盐岩缝洞型储层已成为主要的油气勘探目标。但目前这些目标的勘探难度仍然较高,储层钻遇率很低,严重制约了油气勘探开发的发展。近年来,基于VSP的储层预测及地震地质导向方法逐步被国内外学者所关注,它是将VSP、地面地震和钻井工程相结合的一项交叉学科技术。传统的随钻地震方法的作业方式以钻头破岩振动为激发源、地面或邻井中检波器接收[1-2],而基于VSP的地震地质导向方法则是采用主动震源在地表或井中激发,通常分为基于正VSP和逆VSP 的两种地震地质导向方法[3-5]。需指出的是,近年来有些文献将该类方法归纳为随钻地震方法,是不够严谨的。正VSP和逆VSP地震地质导向方法的观测系统在几何形式上为互逆互等关系,因此两种方法所获得的井中地震数据处理方法是类似的。其中逆VSP 采用井中震源激发、地面检波器接收的方式,与传统的随钻地震方法在观测方式上类似,但传统的随钻地震方法以正在钻进作业工作中的钻头为信号源,钻头信号难以获得、噪声水平较高,特别是近年来随着PDC 钻头的广泛使用,切削式的破岩作业产生的纵波能量更低。逆VSP方法在激发能量、可控制性、作业时间上具有一定优势,该方法目前仍在探索发展中。多个国内外油服公司先后进行了井下电火花、井下压电陶瓷、井下可控震源等多种激发源的研发与应用试验,致力于开发出既可以产生足够激发能量,又能确保井筒安全的理想井下激发仪器,预期将在近几年内有所突破[6],目前尚不能应用于解决高精度的钻前储层预测问题。基于正VSP的地震地质导向方法利用地面震源激发、井中仪器接收的方式获得钻前地震和地质信息[7-9],该技术相对成熟。本文主要讨论这种观测方式。与常规VSP方法主要区别体现在3个方面:①需要在钻井周期内完成快速的井中地震数据采集;②需要实时的地震数据处理、解释;③需要快速、准确的钻前目标预测与钻井轨迹指导。与地面地震相比,该方法在井孔中获取地震数据,其地震波旅行路径更短、信号的衰减更小,因此,它具有高信噪比、高分辨率和更好的地震波特征,可以很好地补充和驱动地面地震的处理解释,目前已在钻前储层预测方面发挥了较好的作用[10-11]。为了更准确地预测地质目标,本文系统讨论了地震地质导向方法,从基本方法原理出发,确定了完整而可行的作业流程,形成了基于不同仪器的一系列试验方法,并探索开发了新型井下接收仪器。在不同探区的数个深井项目中进行了试验,获取了较为理想的地震数据。分析结果表明,该方法具备可实施性,采集系统稳定,能够解决钻前地质目标预测问题,有效提升目标储层钻遇率,同时确保生产作业安全、降低作业成本[12-13],具有良好的应用推广前景。
1 方法原理
1.1 基于VSP的地震地质导向方法实施系统
基于VSP的地震地质导向方法将井中地震、地面地震方法和钻井工程相结合,利用钻井过程中获得的井中地震资料提取井控参数,约束三维地面地震数据进行重新偏移处理,并将其解释结果用于目标储层预测,实时调整钻井轨迹,如图1所示,该方法包括以下3个主要环节。
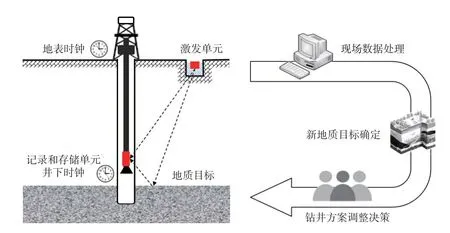
图1 基于VSP地震地质导向实施与决策系统
1)井中地震数据采集。快速准确地进行井中地震数据采集是本项研究的关键,为了提高井中地震数据采集的时效性,经过大量的方法研究试验,探索形成了一套完整的作业体系,同时也开发了一种新的采集仪器,包括探测单元、记录和存储单元、时间标定和数据传输单元、钻杆短节等几个部分。
2)现场数据处理。数据处理包括两个步骤:①井中地震数据处理,获得准确的井控参数;②在所获得的参数的约束下进行地面地震数据重新偏移处理。
3)地球物理目标预测和钻井轨迹调整。利用重新处理得到的结果确定地球物理目标的空间位置,并及时调整钻井轨迹,使得钻头准确命中目标储层。
1.2 基于VSP的地震地质导向方法的工作流程
图2显示了基于VSP的地震地质导向方法的工作流程,共包括5个主要步骤,需要3个研究组共同完成。时间。

图2 基于VSP的地震地质导向方法的工作流程
3)井中地震数据处理。在该步骤中,第一研究组进行高效的现场数据处理,获得可靠的井中地震波场、速度和井控参数。此步骤一般在2h内完成。
4)地面地震数据处理。包括地震波场衰减补偿、速度模型建立、三维地震数据重新偏移和深度域波场标定。该步骤一般花费不超过8 h,由第三研究组完成。
5)地球物理目标的空间位置预测和钻井轨迹设计调整。此步骤一般不超过2 h,由第一、三研究组与油田公司地质专家共同完成。
上述5个步骤是系统性的基于VSP的地震地质导向方法工作流程,涵盖了井中检波器接收的各种作业方法,同时处理流程也是完整的,除了速度约束重新偏移处理外,流程中用到了更多的井中和地面地震数据,包括井控参数的提取和补偿、重新偏移处理、VSP走廊标定等,实际生产中可根据作业的时间要求和区域地质情况进行数据取舍。
2 模型试验
1)项目启动,确定项目运行计划和井中地震数据采集观测系统。第一研究组和第二研究组的人员和设备及时到达作业现场,开始设备测试和数据采集的准备工作。
2)井中地震数据采集和处理准备。地面地震数据由第三研究组进行室内准备,数据采集工作由第二研究组在钻井间隙进行,通常该步骤不需要占用钻井
为了分析以塔里木盆地普遍发育的二叠系火成岩为代表的上覆地层对目标储层的影响[14-15],我们首先通过正、反演模型进行模拟分析。
2.1 模型正演
参考塔里木盆地塔北和塔中地区地层情况[16-17],建立如图3所示的地质模型,其中图3a为稳定速度地质模型,随着深度增加速度由2000 m/s增加至5000 m/s,速度梯度为0.5s-1;图3b为加入了变速层的地质模型,变速层厚度为300 m,速度从左向右由4 000 m/s增至5500 m/s,用于模拟该区二叠系火成岩的不稳定分布。两个模型均在4500 m 深度位置加入了大小为300 m×200 m、速度为4000 m/s的特殊地质体,用于模拟碳酸盐岩溶洞勘探目标。

图3 稳定速度(a)和含变速层(b)地质模型
2.2 模拟数据成像处理
提取上述模型中的稳定地层速度,忽略变速层的影响,分别对两个模型的正演模拟数据进行深度偏移处理,得到如图4所示的成像结果。从图4b中可明显观察到如红色虚线所示的目标体与真实位置的偏差,测量可知横向偏差为+29 m,纵向偏差为-33 m,尽管该偏差与数千米的井深相比显得十分微小,但实际上,所模拟的塔里木盆地碳酸盐岩勘探目标位置偏差也通常只有20~50 m,这一看似较小的偏差往往决定了钻井的成功与否。

图4 稳定模型模拟数据(a)和含变速层模型模拟数据(b)的成像结果
2.3 参数约束成像处理
图5a给出了含变速层的准确速度得到的成像结果。由图5a可见,目标体得到了有效归位。图5b为在准确速度的基础上,对叠前数据进行真振幅恢复和吸收衰减补偿等参数约束后得到的成像结果。由图5b可见,目标体的刻画精度得到了一定的提升。实际数据中速度和各向异性参数、球面扩散和吸收衰减参数难以精确得到,只能利用井中地震方法提取并进行约束处理,最大程度地趋近真实结果,最终的成像结果也需要利用井中地震走廊进行层位标定。
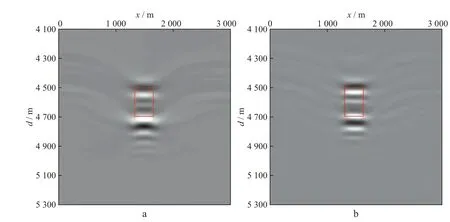
图5 准确速度(a)和多参数约束(b)成像结果
3 地震地质导向方法数据采集
近年来,在塔里木盆地、准噶尔盆地、环渤海湾地区、银额盆地等探区,面向油气勘探开发的生产需求,开展了大量的地震地质导向方法的探索和研究工作,目前共计完成了近200井次的试验工作,表1给出了部分地震地质导向方法的试验情况。

表1__地震地质导向方法试验情况
3.1 以钻头为震源的逆VSP地震地质导向方法
以钻头为震源的地震地质导向方法研究已经取得了一系列随钻地震研究成果[2]。为了深化该项研究,2011年在塔里木探区组织了新一轮的随钻地震系列现场试验,选择正在钻进中的K8井为试验井,在井旁平行布设了两条6000 m 长的检波点线,其中一条采用的模拟检波器组合以50 m 间距接收,另一条采用三分量数字检波器以25 m 间距接收;在钻头信号采集方面,分别在钻井平台、方钻杆、井口、鹅颈钩等位置,焊接或埋置了26只不同类型的检波器,其中包括常规三分量检波器和水听器、国外两个合作单位提供的实时无线传输检波器、授时仪检波器等,记录了包括标量数据在内的四分量数据。该系统在22 d内,不间断地记录了3542~4350 m 井段、超过800 m 的钻头信号。试验表明,现场的排列记录数据和钻头监测信号均表现出较高的噪声水平,经过长时间(每钻进10 m)的数据叠加,再经过钻头信号互相关、噪声压制等处理工作后,得到了随钻地震数据,如图6所示,并最终得到小块的成像剖面(图7),可以获得一定的钻前地层信息。尽管该项试验取得了一定的研究成果,但检波器动态范围不足和强噪声压制方法不成熟影响了钻头信号的获取,且TB级的数据处理量及逆Walkaway-VSP 成像处理周期过长,难以满足时效性极强的随钻地震勘探开发的需要,仍需要开展进一步的攻关研究。此外,作为以钻头为震源的替代技术,利用钻头和电缆携带的电火花震源也在研发之中。
3.2 基于常规检波器VSP的地震地质导向方法
井中检波器地震数据采集属于一种高效率的中途多分量VSP方法,利用井中检波器在套管井中进行快速数据采集并进行现场处理,在最短的时间内获得用于地震地质导向的数据。该方法在地震地质导向作业方法中占到绝大多数,也是目前最成熟、最可靠的方法,但对井筒条件要求较高,占井时间较长,且在大段祼眼井段观测时安全风险偏高。
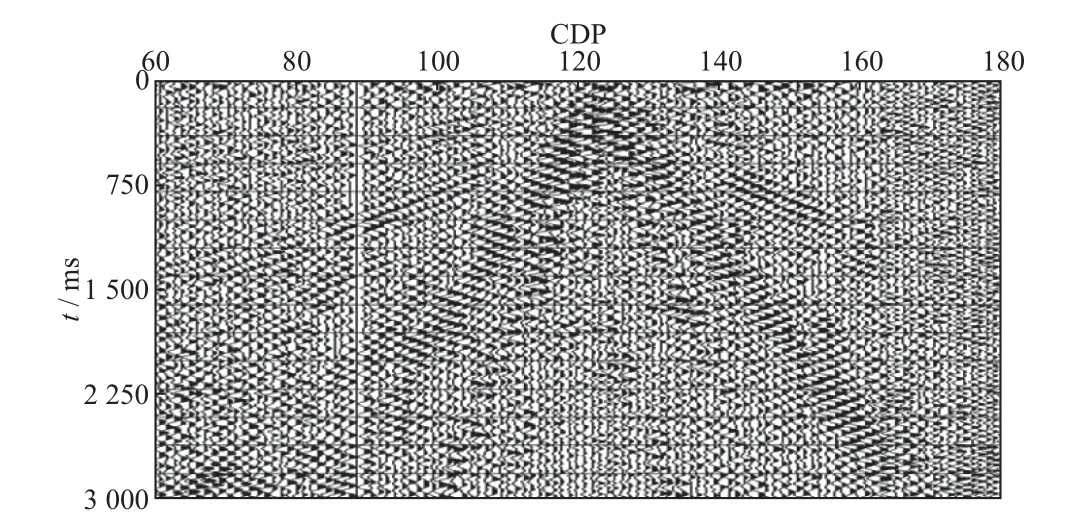
图6 以钻头为震源的经相关处理后的随钻采集数据
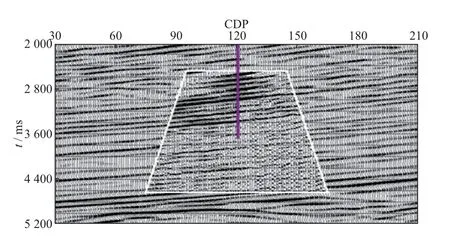
图7 以钻头为震源的随钻地震成像结果并镶嵌在地面地震剖面中
3.3 基于水听器VSP的地震地质导向方法
对于某些存在较长裸眼段的试验井,利用常规井中检波器需要打开支撑臂进行作业,在采集时存在一定的安全风险,因此提出了一种基于水听器的地震地质导向方法,研制了直径较小、无需推靠的记录仪器,并配有实时打捞工具,实际数据应用中取得了一定的效果。图8a、图8b和图8c分别给出了在2015年9月、2015年11月和2016年1月进行的3次采集试验得到的地震记录。对比图8a、图8b和图8c可以看出,通过持续的技术攻关,水听器采集可以获得较高品质的井中地震数据,该记录数据为标量数据,一定程度上可以代替常规检波器的三分量数据。因此可配合常规井中检波器在裸眼井段应用,提高井中作业的安全性。
3.4 基于钻头检波器VSP的地震地质导向方法

图8 不同日期水听器采集试验得到的地震记录a 2015年9月采集到的地震记录;b 2015年11月采集到的地震记录;c 2016年1月采集到的地震记录
尽管井中检波器记录方法可以获得理想的用于地震地质导向的VSP数据,同时最大程度地减少了钻井过程中的停钻等待时间,但时效性仍有待加强,需要更加快捷的测量工具。因此开发了钻头检波器井中地震数据采集系统。该系统结构充分考虑了各种严苛数据采集环境,首先要解决高温、高压、高振动环境下记录系统的稳定问题,其次支撑臂推靠装置是另一个挑战性的技术。另外需要良好的密封条件用来保护地震检波器不受损坏,保证大容量电池和存储设备系统正常工作。设计并开发了井下采集接收系统,如图9所示。5个部件集成在一个钻杆短节内,它们是三分量地震检波器、大容量电池、电子板、数据输入/输出接口和支撑臂。其中地震检波器的最大动态范围为100d B,全系统能承受的最高温度为175℃,最大耐压为140 MPa,最大抗振能力为20 g。
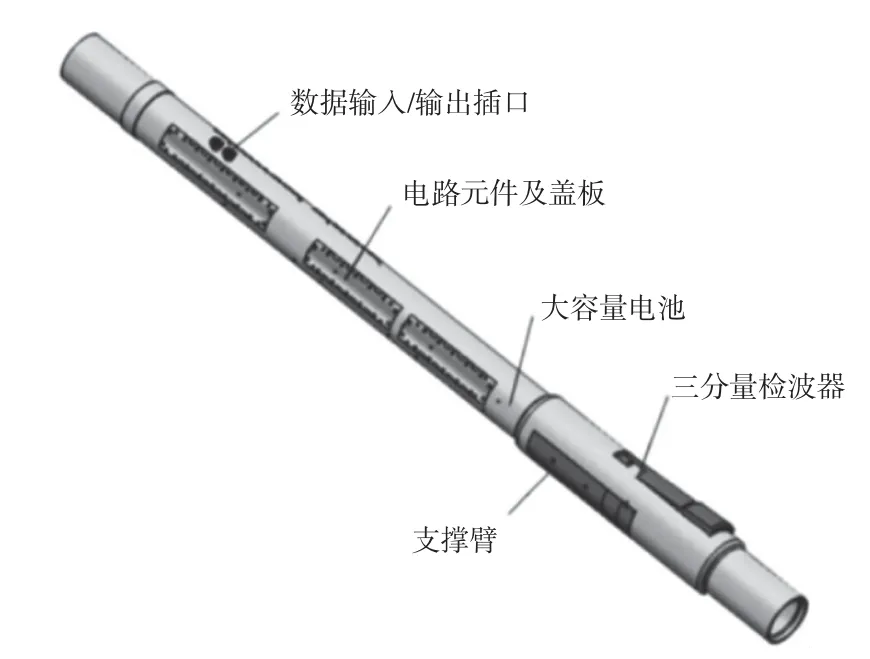
图9 井下采集接收系统
由于记录系统与钻具相组合,因此它需要独立工作。时间同步和数据传输也是必须解决的问题。研究中提出了同温、同压标定的方法,较好地解决了这一问题。具体操作是将一个高精度时钟安装在井下记录系统中,另一个放入模拟环境箱中,其温度和压力与钻头所在位置相同。试验结果表明,两个时钟的稳定性可达到±1 ppb。在连续工作约20 d的实验中,只产生了1 ms的误差。受数据量的限制,本研究中采用了大容量储存卡,并放弃泥浆数据传输的方法,在钻井作业空隙时间,利用数据插头传输数据。图10显示了钻头地震检波器的记录数据,分析可知,数据初至起跳干脆、信噪比较高;经过时间同步后,钻头地震检波器与常规地震检波器的记录数据如图11所示,图中初至波和续至波的信噪比、波形特征等一致性较好,证明了系统的稳定性,认为已初步具备了推广应用能力。该方法可以最快速地提供地质导向成果,同时也最为安全,但需要长时间的投入设备进行现场采集,甚至在钻井全周期内录制数据,设备成本投入较高。因此在选用钻头检波器方法和常规检波器(或水听器)方法时,要根据每口井的地质和工程的具体情况优选。

图10 钻头检波器地震原始记录数据

图11 钻头检波器记录镶嵌到常规检波器记录中的结果
3.5 基于光纤VSP的地震地质导向方法
本项研究中引入了分布式光纤作为井下接收和传输装置,其具有高效率、高密度、全井段、耐高温、耐高压、子波一致性好等特点,较适宜基于VSP地震地质导向地震数据的采集。经过详细论证和多次现场试验,确定利用钻井作业间隙快速采集光纤地震数据的方法,该方法较常规方法占用钻井时间更少、下井作业更安全,同时较钻头检波器采集的数据更全面。图12和图13分别给出了基于分布式光纤VSP和常规检波器VSP 的地震地质导向方法采集的地震数据。对比图12和图13可见,光纤数据信噪比较低,但可以拾取初至并计算VSP速度,其结果可以用于较简单的地震地质导向处理应用,但求取其它参数或提取上行波场有一定的困难,因此目前尚不能完全代替井下接收仪器。随着光纤设备的进步和大数据量快速处理能力的提升(一些连续记录光纤数据达PB级),基于光纤VSP的地震地质导向方法将成为重要的地震地质导向方法技术之一。
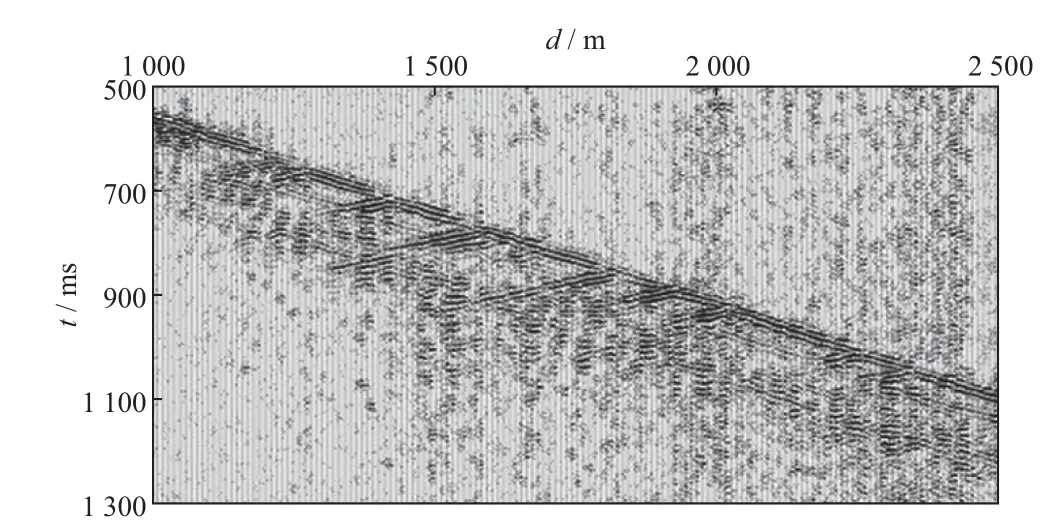
图12 基于分布式光纤VSP的地震地质导向方法采集的地震数据

图13 基于常规检波器VSP的地震地质导向方法采集的地震数据
4 应用效果分析
塔里木盆地Well-A 井于2016年完钻,其井深超过6000 m,勘探目标为奥陶系碳酸盐岩缝洞体,由于受到上覆地层速度变化的影响,第一次钻井未能钻遇勘探目标,地质专家寄希望于利用基于VSP的地震地质导向方法进行补救。Well-B井是2019年新区块的一口开发井,该地区二叠系火成岩厚度变化较大,为了确保钻井成功,进行了地震地质导向处理测量。两个试验项目分别代表了两种不同类型的地质需求。
4.1 参数提取
基于如图14所示的Well-A 井井中采集数据,首先拾取初至波,计算地层地震波速度。图15给出了Well-A 井的速度曲线。从图15 可以看出,在4000 m 深度附近速度曲线变化较剧烈,说明该井钻遇地层的速度变化较为剧烈。为了进一步提升储层预测精度,基于该井中地震数据,提取了更多的井控参数,包括用于球面扩散补偿的真振幅恢复因子(TAR)和地层吸收因子(Q),如图16和图17所示。
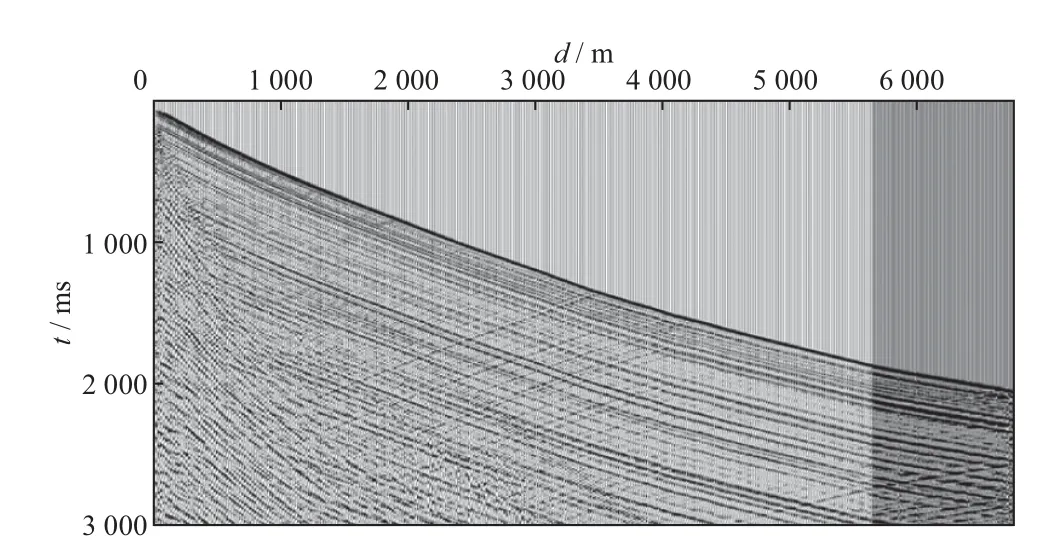
图14 Well-A 井地震数据

图15 Well-A 井速度曲线
4.2 井控处理
图18显示了Well-B井井控地震速度建模过程,其中图18a为井中地震速度模型、图18b为地面地震速度模型、图18c为利用井中地震速度约束的地面地震速度模型,利用图18c所示的重建速度模型对叠前数据进行
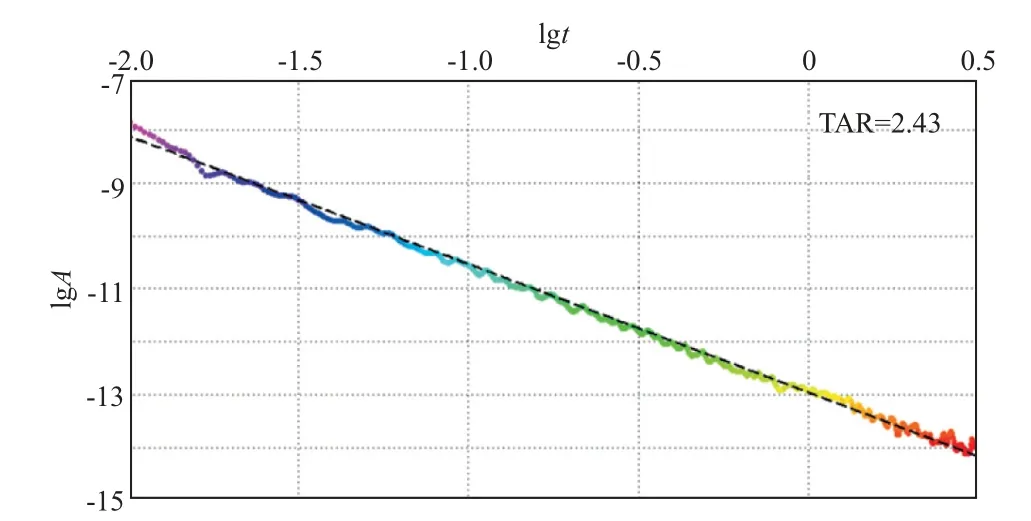
图16 Well-A 井TAR 因子曲线

图17 Well-A 井Q 因子曲线
重新偏移处理,得到以井口为中心的36 km2的新的处理后的三维地震数据。需要指出的是,准确的TAR 因子、Q因子对于地震偏移处理会起到一定的改善作用[18],但通常需要在叠前数据中应用,这会消耗较多的处理时间,因此大多数情况下仍只利用速度这一个参数进行井控地震偏移处理[19-20],少数对成像精度要求更高的研究项目进行了多参数井控偏移处理。
4.3 层位标定
井中地震走廊镶嵌对比是目前应用广泛、准确可靠的地震标定方法,研究中发现,多数情况下时间域地震剖面与时间域走廊剖面有较好的吻合关系[21],而深度域地震剖面与深度域走廊剖面存在一定的偏差,这是由于地层速度不准确而产生的。图19a给出了Well-A 井地震地质导向处理前的深度域标定结果。从图19a可明显观察到层位差异。图19b给出了Well-A 井地震地质导向处理后的深度域标定结果,地震地质导向处理后的剖面与走廊剖面吻合良好,证实了重新偏移成像的可靠性。
4.4 钻井方案调整决策
基于地震地质导向成果,首先对Well-A 井勘探目标位置进行了充分的讨论,并确定了将原钻探靶点向南西方向调整65 m,如图20所示。依调整方案实施钻进,最后成功命中溶洞目标并获得了良好的油气发现,有效补救了原钻探失利的影响。

图19 Well-A 井地震地质导向处理前(a)、后(b)的走廊剖面标定结果
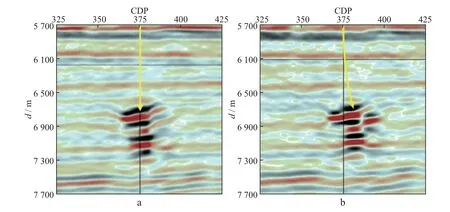
图20 Well-A 井设计钻井轨迹调整前(a)、后(b)的对比
对于Well-B井,由于火成岩速度的准确修正,地震地质导向处理前、后数据产生了明显的变化,提取对于该探区缝洞体储层相对敏感的最大波谷属性,可观察到目标位置的变化,如图21所示。将靶点向北东方向调整35m 后,同样命中勘探目标,获得油气产量。
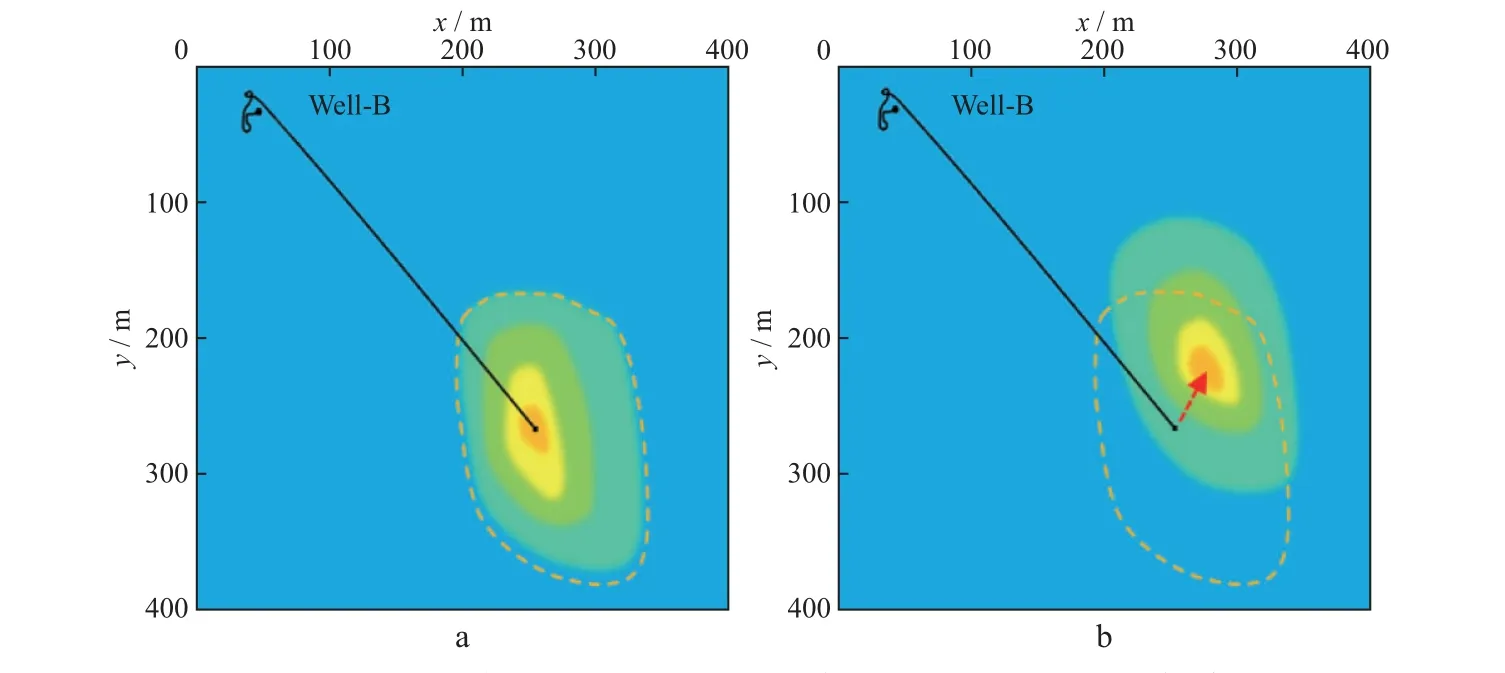
图21 Well-B井地震地质导向处理前(a)、后(b)的地质目标位置
5 结束语
1)传统的随钻地震方法受现有检波器动态范围不足和强噪声压制方法不成熟的制约,目前尚未达到生产应用的能力,且全井段采集时间和逆Walkaway-VSP成像处理周期过长,难以满足时效性极强的地震地质导向勘探开发需求。
2)基于井下检波器VSP 采集的地震地质导向方法较为成熟,以采集时效性和安全性由高到低进行排序,依次为钻头检波器、分布式光纤、水听器和常规检波器方法;以数据品质由高到低排序,依次为常规检波器、水听器、钻头检波器和分布式光纤。在应用选择方面,近几年仍将以常规和钻头检波器试验为主、水听器为辅,未来分布式光纤将扮演重要角色。
3)在处理解释技术方面,基于VSP地震地质导向方法所获得的关键地球物理参数,可以有效提升地震成像的可靠性,采用多参数约束的方式,即除了井中地震速度控制以外,采用更多的井中地震参数进行处理控制,将有助于得到更可靠的重新偏移处理成果,对目标体的刻画也更加精确。
4)在采集硬件研发方面,在多个探区进行的试验研究表明新仪器性能稳定、记录数据品质较好,下一步将集中在记录信号的实时传输、支撑臂推靠等方面进行技术攻关。
2015年至今,对已完成的近200个基于VSP 地震地质导向项目统计分析,不同探区的储层钻遇率均超过10%,表明该方法具有一定的可靠性和实用性。同时,井中地震记录仪器也表现出良好性能,具备一定的推广应用前景,预期可以用于解决复杂构造储层、薄储层、页岩油田等地质目标的预测问题。
致谢:感谢中国石油大学刘洋教授、中国地质大学芦俊教授的方法指导与支持,感谢塔里木油田公司朱忠谦、东方地球物理公司马培领、王阳等领导和专家的支持与帮助。
