基于邻域粗糙集和D-S证据理论的雷达辐射源识别
2020-06-23解梦奇
刘 争,祝 利,解梦奇
(国防科技大学,安徽 合肥230037)
0 引 言
雷达辐射源目标往往负责作战系统的前哨工作,具有重要的作战价值。雷达辐射源识别能够引导对敌雷达目标的干扰和打击,使敌作战系统致盲,是目前战场电子侦察的重要手段之一[1]。但传感器在复杂电磁环境中所截获到的辐射源信号往往不准确、不完整,使得雷达辐射源识别成为目前侦察活动中的重难点问题。为此基于多传感器的目标融合识别已发展成为现代辐射源识别的必要手段,而证据理论方法因能够有效处理不确定问题大量应用于融合识别中,是目前常用的目标识别融合方法。


3.1 信号特征选择
设识别历史数据库中含可识别的目标类型有5类,分别表示为P1,P2,P3,P4,P5。辐射源信号特征参数构成信号特征参数集Q=(q1,q2,q3,q4),设识别历史数据库如表2所示(每个目标类型各含数据10组)。

表2 目标识别历史数据库
按照步长0.1对λ取值,经30次实验发现具有分类效果的λ取值在[1.4,3.8]之间,约简效果如图4所示。

图4 不同λ 取值下的分类效果
确定在不同λ阈值大小条件下的目标信号特征权重划分如表3所示。

表3 目标信号特征权重划分
应用文献[12]、[13]中的权重折衷方法,计算λ阈值在区间中的折衷权重:
得到最终的特征权重划分为[0.371 8,0.018 7,0.0.690 5,0],即约简特征集合为(q1,q2,q4)(载频、脉冲重复间隔、脉冲调制特征)。
3.2 目标融合识别
通过统计分析得到P1,P2,P3,P4,P55个目标类型的基准参数(目标参考序列)如表4所示,在不同噪声环境下侦获其信号特征参数(目标比较序列)如表5所示。以下设置2类识别实验,分别进行验证对比,说明不同噪声环境下的特征分权和融合识别效果。
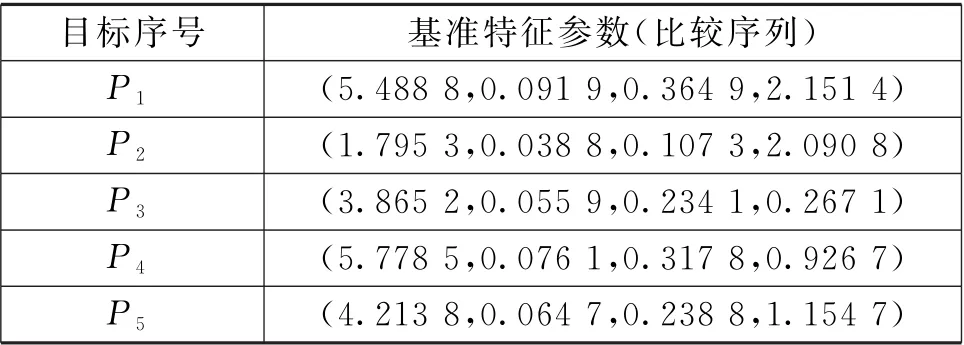
表4 目标比较序列

表5 目标参考序列
分别计算比较特征权重在本文方法、熵权法分权以及未分权条件下的类型测度,如图5~图7所示。
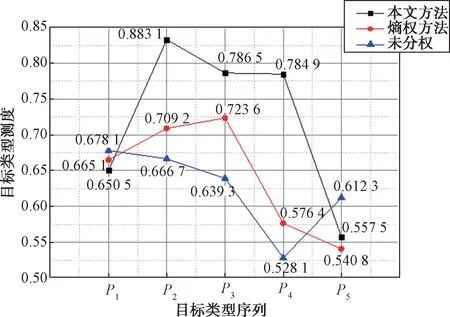
图5 10 dB噪声测度比较
从不同噪声下的测度比较情况可以看出,熵权法识别结果鲁棒性较差,其中在20 dB 噪声条件下P3测度最高,而在10 d B和30 d B 条件P2下测度最高。同时本文方法与未分权条件相比,P1,P2,P3,P4,P5测度差异较大,表现出更好的收敛性和准确性,更易于区分和识别类型。
模拟3个传感器在20 dB噪声条件下对目标连续侦察2 个时间周期,侦获目标特征参数如表6所示。

图6 20 dB噪声测度比较
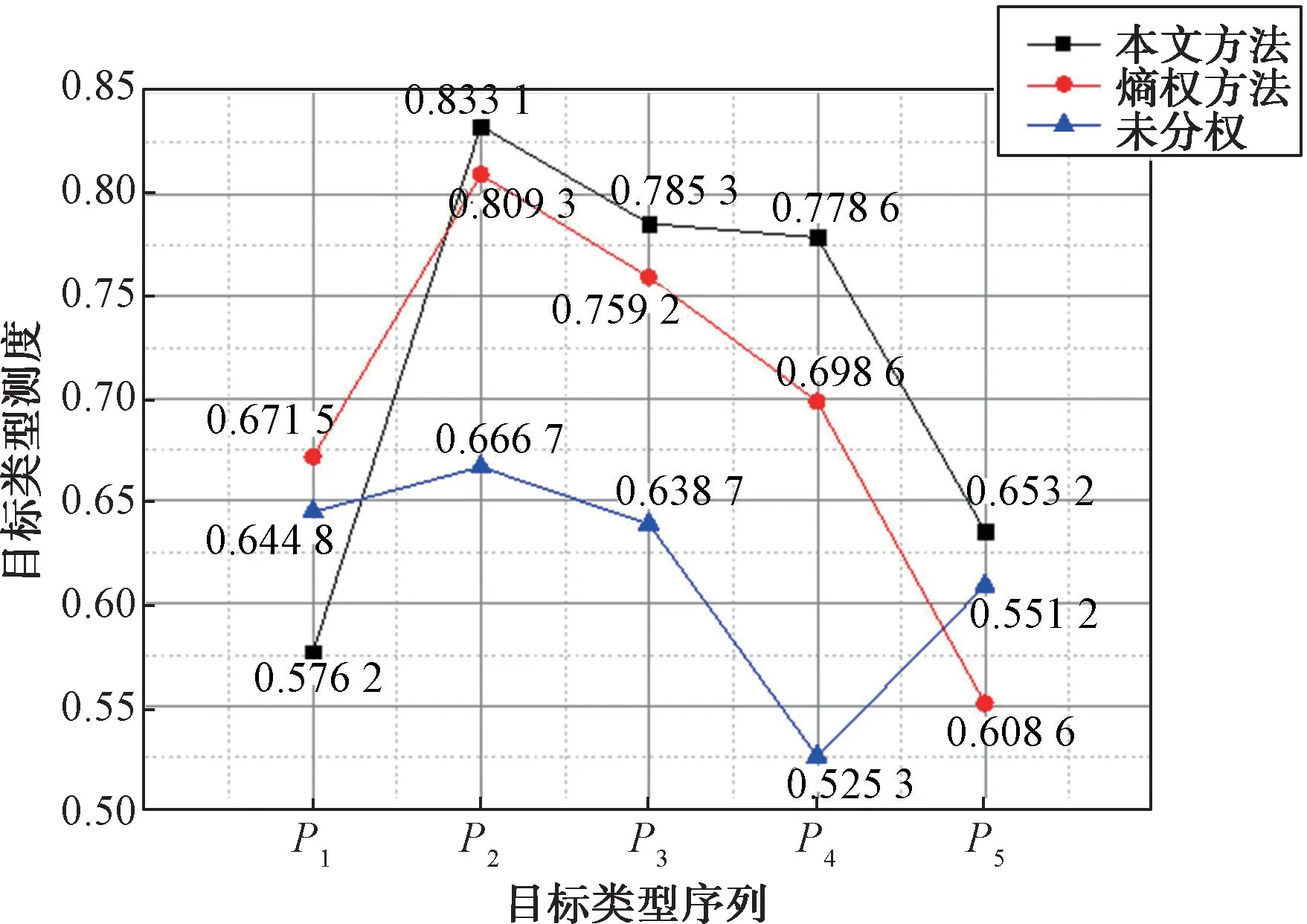
图7 30 dB噪声测度比较

表6 传感器侦获参数数据
由特征参数计算得到辐射源类型测度,并转化为证据表示得到识别基本概率值如表7所示。
表7中m1,m2,m3,m4,m5分别表示传感器在单位时间内对目标类型识别的基本概率值。融合证据组得到最终识别概率值,得到m2证据体概率值最高,即可判定最终识别结果为目标序列P2。同时将融合证据组与单一证据组进行比较,如图8所示。
由图8中的曲线可以看出,不同传感器在不同时间周期内的识别结果有所不同,如传感器x2在时间周期y2与传感器x3在时间周期y1相比,识别结果排序有所差异,但融合结果则“中和”了这些差异,使得证据体概率值区分度更高,更易于识别出辐射源目标。

表7 识别基本概率值

图8 基本概率值比较
4 结束语
为解决复杂环境下雷达辐射源识别准确率低的问题,本文提出一种基于邻域粗糙集和D-S证据理论的目标识别模型。首先从辐射源信号特征分权方法入手,考虑到邻域粗糙集处理连续数据集的优势,应用于辐射源历史识别数据库挖掘,计算获得信号特征权重。并在仿真验证中比较熵权法和未分权条件下计算出的辐射源类型测度,说明了本文方法的合理性和优越性。同时考虑到复杂环境下单一传感器在准确性和可靠性上的不足,在特征分权基础上,将灰关联分析与证据理论结合,通过融合识别证据得到最终识别结果,增加了辐射源识别的可信度,并具有良好的容错性。