雷达低角测量误差仿真分析及改善方法
2020-06-23陆小凯钱乔龙
陆小凯,钱乔龙,吴 俭
(中国船舶重工集团公司第七二三研究所,江苏 扬州225101)
0 引 言
舰载雷达在测量低仰角目标时,不可避免地有海面的反射。这种多径效应会产生大的仰角测量误差,导致目标指示不准确,严重时会丢失目标,形成探测盲区。作为现代战争四大威胁之一,低空突防飞机、掠海导弹可以对舰船实施毁灭性打击。面对各种低空突防手段的威胁,研究制定雷达抗多路径干扰方法以提高雷达低角测量精度具有重大意义[1]。
国内外学者对低仰角测量技术的研究已走过数十年的历程,传统的单脉冲雷达为了克服低仰角多路径产生的测角偏差,通常采用偏轴跟踪技术、复角技术、天线窄波束设计、重滤波等方法[23]。目前完全消除多路径影响还没有绝对的解决办法,各种方法都有自身的限制。
1 多路径效应模型
分析多路径效应对单脉冲比幅测角雷达低角测量精度的影响,主要考虑多路径几何模型和俯仰角误差计算模型。

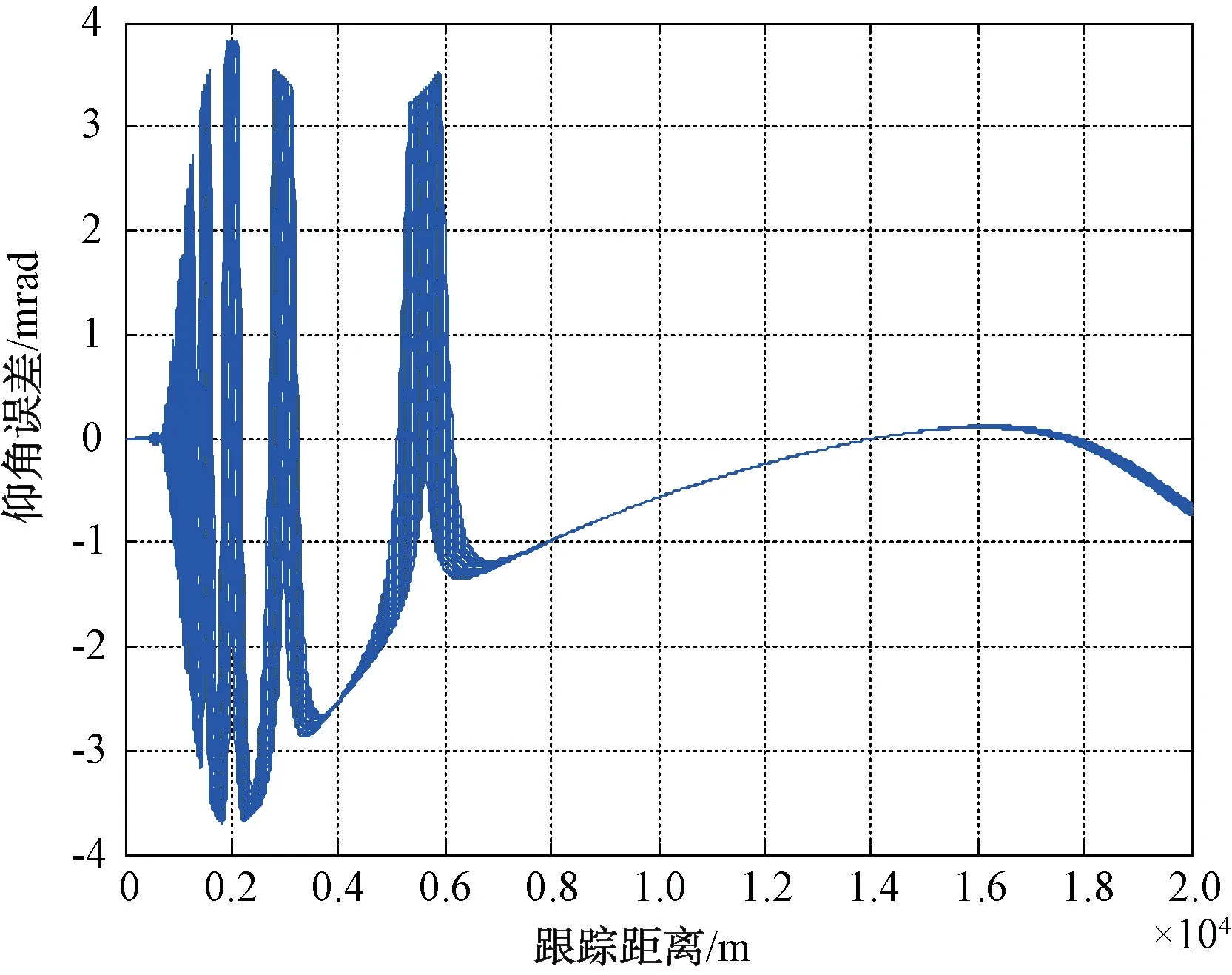
图2 雷达仰角误差仿真曲线(一)
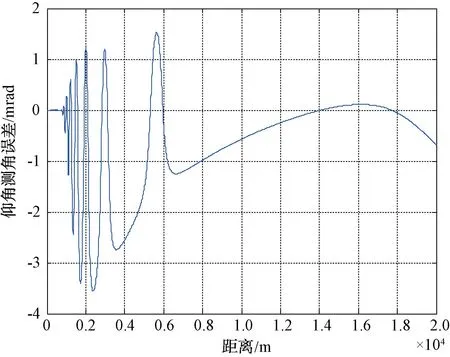
图3 雷达仰角误差仿真曲线(二)
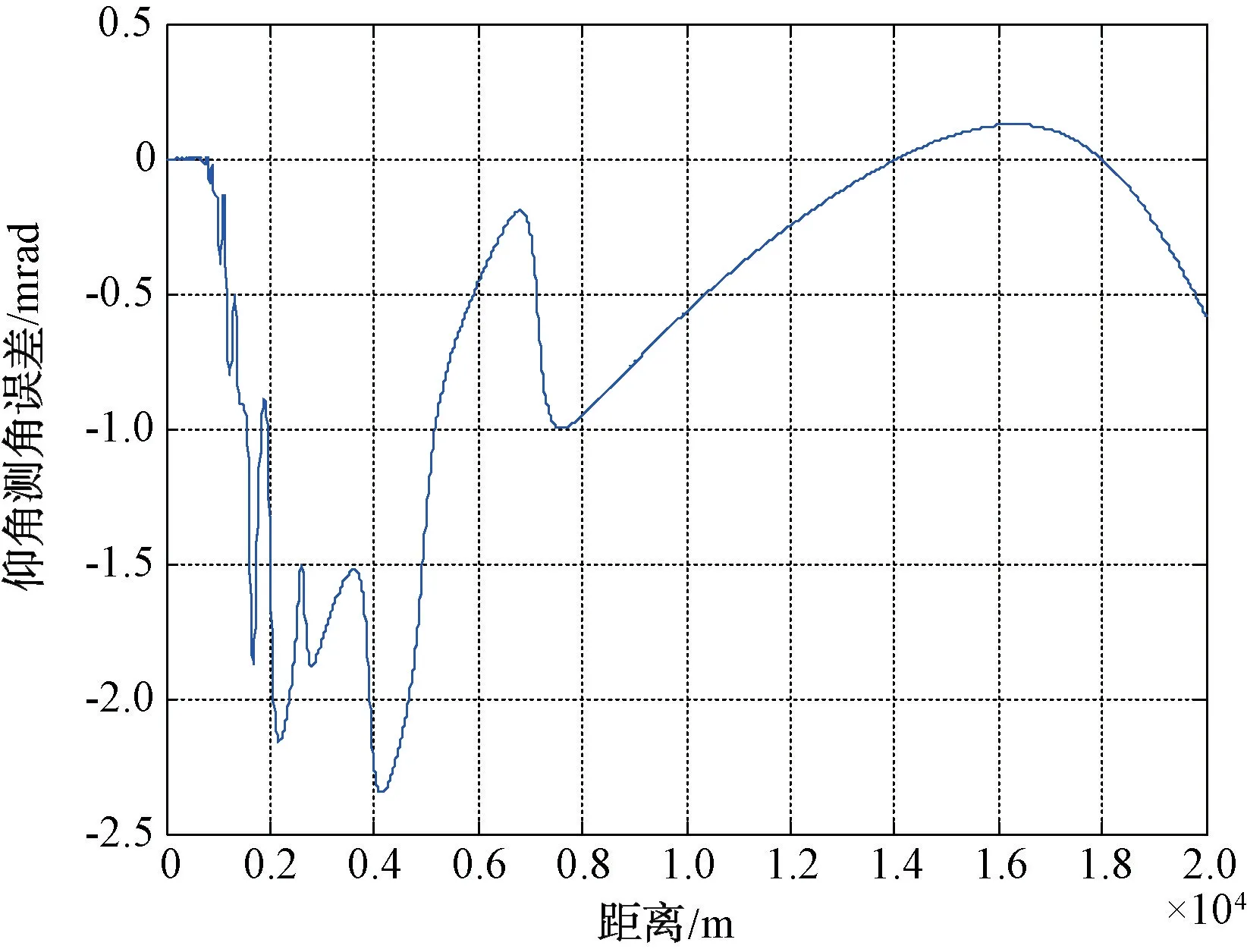
图4 雷达仰角误差仿真曲线(三)
对比图2、图3可以发现,平均加权后的角误差值相对于单频点时的角误差有了很大程度的改善,这是因为宽带捷变频可以使由多路径引起的仰角测量误差在不同相位相互抵消,即去除了镜像信号与直达信号的相关性。对比图3、图4可以发现,当变频带宽加大时,角误差值则会变小,因此适当加大变频带宽会带来更好的效果。
当海情s=1,天线架高hr=20 m,在X波段4 GHz带宽下分16点均匀跳变,目标高度ht=10 m 和ht=20 m时算得目标仰角误差曲线如图5、图6所示。

图5 雷达仰角误差仿真曲线(四)

图6 雷达仰角误差仿真曲线(五)
对比图4、图5和图6,当雷达工作频率、海情、天线高度相同而目标高度变化时,仰角误差曲线的总体变化相对缓慢且趋势是一致的,即总是在近区某距离段出现大的凹口。10 km 以外距离段的角误差相对较小。
当海情s=3,天线架高hr=20 m,在X波段4 GHz带宽下分16点均匀跳变,目标高度ht=10 m 和ht=20 m时算得目标仰角误差曲线如图7、图8所示。
由图7和图8可以看出,当海情变高时,海面变得粗糙,由多路径引起的俯仰角误差会下降。
3 改善低角性能方法
根据低角误差仿真分析结果,当雷达工作频率、天线高度、海情确定时,角误差随目标距离、高度的变化相对缓慢,且有一定规律可循。雷达系统工作时,天线架高、工作频率等参数均为已知量,可按照不同海情、目标高度、距离通过大量仿真建立角误差修正数据库。目标在低空高速飞行时,其高度变化
图7 雷达仰角误差仿真曲线(六)
图8 雷达仰角误差仿真曲线(七)
一般相对缓慢,可将目标高度作为一级索引并按固定步进进行分段(h1,h2…h n),将海情、目标距离作为二级索引,目标距离分段时,主要考虑对近区角误差大的距离段进行修正,其余距离段可取0。针对不同目标高度、海情、目标距离通过仿真计算得出修正值δi,j,形成角误差补偿曲线,并存入角误差修正数据库,如图9所示。

图9 角误差修正数据库示意图
雷达工作时,将误差修正数据库装载到误差修正模块。雷达探测得到目标距离、高度后,连同设定的海情、反射系数、天线高度等外部参数一起送至误差修正模块。该模块实时从误差修正数据库中选择特定的补偿曲线对角误差进行修正,并送出最终计算值。
当海情s=1,天线架高hr=20 m,在X波段4 GHz带宽下分16点均匀跳变,目标高度ht=10 m 条件下,按本方法进行角误差修正后的仰角误差曲线如图10所示。

图10 雷达仰角误差仿真曲线(八)
从图10可以看出,运用宽带捷变频联合自适应角误差修正的方法可以将仰角测量误差控制在一个相当小的范围内。
4 结束语
本文建立了多路径几何模型和角误差计算模型,通过仿真对低角测量误差进行了综合分析,并提出一种改善雷达低角测量精度的方法。利用宽带捷变频去除镜像信号与直达信号的相关性,根据不同海情、目标高度实时选择误差补偿曲线对角误差进行修正。该方法可以有效对抗多路径效应引起的低角测量误差,提高舰载雷达的低仰角测量精度。仿真结果证实了该方法的有效性,可在实际应用中进行试验验证。