轮式无人机自动驶入驶出控制技术
2020-06-22宋辉张健陈宜军
宋辉 张健 陈宜军
摘 要:针对轮式起降无人机跑道利用效率低、跑道占用时间长这一难题,通过分析无人机在地面的滑行受力情况,建立无人机三轮滑跑运动模型,提出了一种自动判断停机位置是否满足滑行要求、自动控制速度、自动故障处置的智能化驶入驶出控制技术,并支持过程中断后再次驶入驶出。滑行试验表明,驶入驶出各项控制功能性能均符合设计逻辑,使用方式灵活,智能化程度高,能满足不同机场、不同停机位置的工程使用需求。
关键词:轮式起降;无人机;自动驶入驶出;自动控制;智能化
中图分类号:V279 文献标志码:A 文章编号:2095-2945(2020)18-0024-04
Abstract: Regarding the problem of low utilization efficiency and long occupation of runway by wheeled takeoff & landing UAVs, based on the analysis of force condition of UAVs in ground motion, a kinematic model of UAV with all wheels in ground motion has been established and an intelligentized taxi-in & taxi-out control strategy has been put forward, through which it can be automatically determined whether parking position satisfies taxiing requirement, speed can be controlled automatically, and emergency treatment of failures can be executed automatically. It also supports taxi-in & taxi-out again after interruption of taxiing. The results of actual taxiing tests indicated that all functional performances of taxi-in & taxi-out control conform to design logic with flexible application and high intelligence, which is capable of meeting the operational requirements of various airfields and parking positions.
Keywords: wheeled takeoff & landing; UAV; auto taxi-in & taxi-out; automatic control; intelligentized
引言
对于具有前三点式起落架结构布局的轮式无人机,地面滑行是无人机飞行的一个重要组成部分。与有人机不同,由于前视摄像机视场较小、数据链路延时等因素,一般情况下无人机通过牵引完成驶入驶出过程,从而导致起飞准备时间较长,着陆后需要人工拖离跑道,浪费了大量时间,降低了跑道使用效率[1],而增加无人机起飞前自动从停机位驶入至跑道起飞点和着陆后直接从跑道驶出的能力可有效解决上述问题。
本文利用某前三点式起落架无人机的三轮滑跑模型,通过分析计算该无人机的转弯半径,设计合適的航迹/速度制导和控制策略及控制律,并结合样例无人机气动布局、系统配置、动力输出特性等实际特点,实现了样例无人机的自动驶入驶出,并已开始工程化使用。
1 使用模式
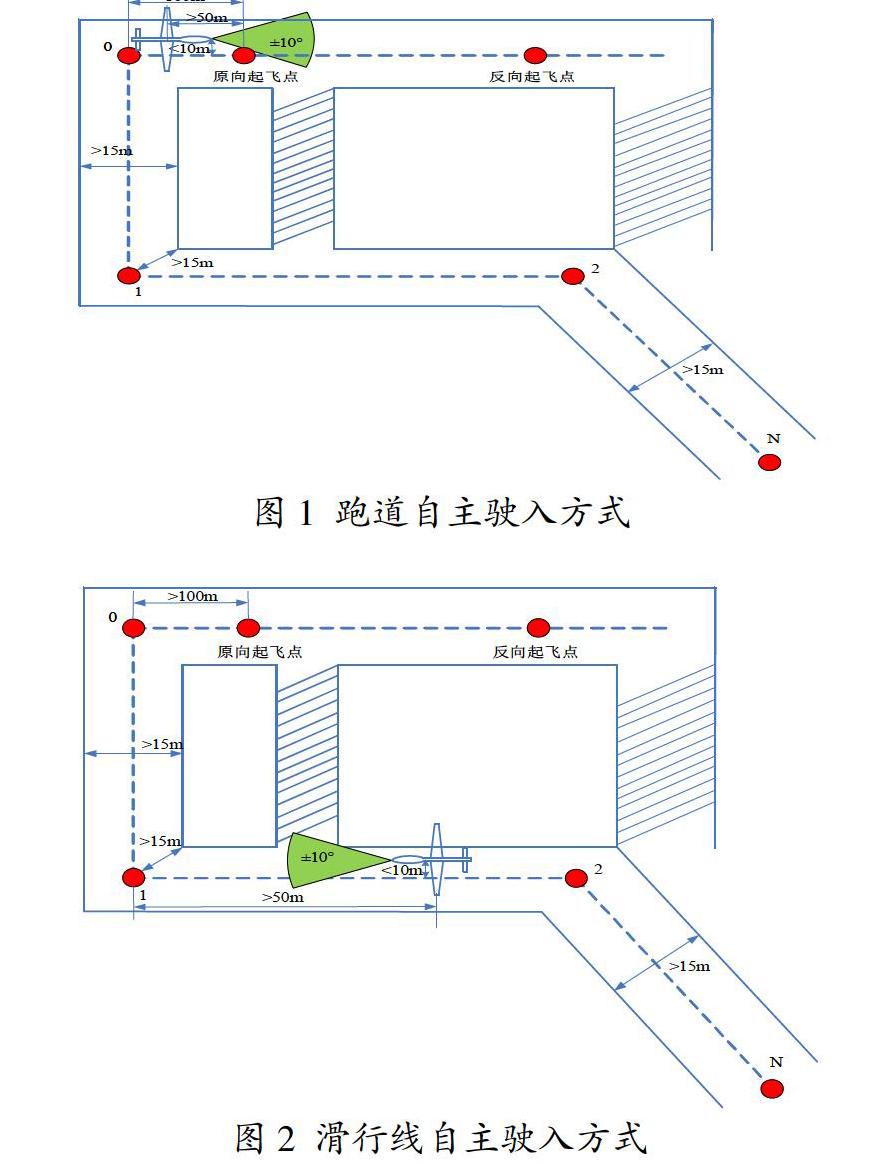
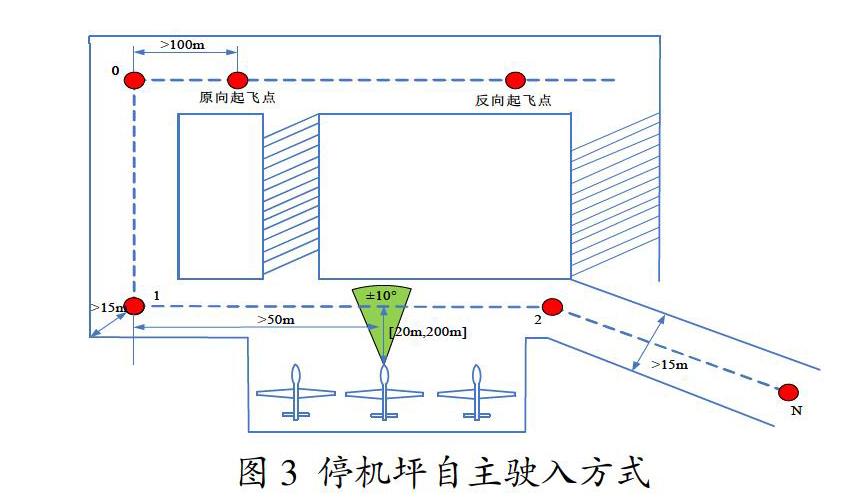
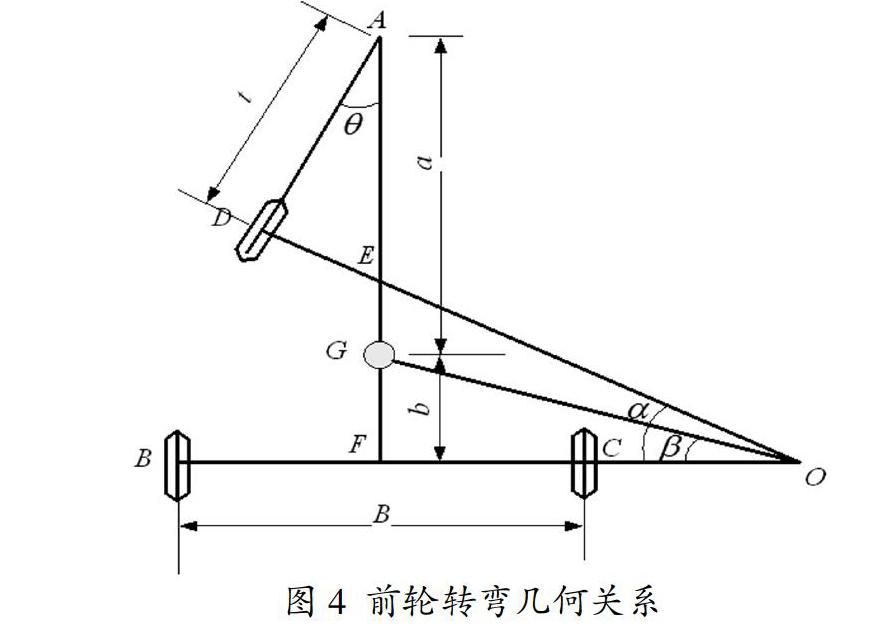
为覆盖大多数机场与不同停机位置自动驶入驶出的要求,同时考虑在驶入驶出过程中出现异常中断后继续驶入驶出的情况,设计了三种不同类型的驶入方式,分别为跑道驶入、滑行线驶入和停机坪驶入方式,分别对应于无人机从跑道驶入至起飞点、从某一牵引道/滑行道驶入至起飞点和从停机坪驶入至起飞点,同时每种驶入方式对飞机停机位有不同的要求(距滑行点距离、距滑行线的垂直距离、航向偏差、侧偏、地速等),分别如图1、图2、图3所示。
自动驶出仅包含有一种情况,即从跑道上驶出,驶出过程中如遇中断后需继续驶出,其对飞机停机位置的要求与滑行线驶入方式相同。
实际使用时,控制系统将实时判断飞机位置是否满足上述要求,并给出具体的状态提示,引导地勤人员正确摆放飞机,保证其满足自动驶入要求。
2 驶入驶出控制
2.1 地面操纵转弯半径计算
驶入驶出过程中,地面操纵转弯半径直接影响到无人机的制导与轨迹控制精度,是影响驶入驶出控制性能的重要参数。
当无人机在地面转弯滑行时,其向心力是由地面作用在机轮上的侧向力提供的[2],不考虑机轮偏滚和无人机侧滑的条件下,无人机前轮转弯时的几何关系如图4所示。
上述几何关系中,各变量定义如下:
B-主轮距 L-前主轮距
t-前轮稳定距 a-前起支柱到重心距离
θ-前轮转弯角 b-主起支柱到重心距离
根据图4中的几何关系,不难得出样例无人机内外侧主轮处的转弯半径如图5所示。
2.2 驶入驶出预处理
为满足实时判断飞机是否满足驶入驶出条件的要求,增加驶入驶出预先处理模块,在驶入驶出航路加载至计算机后,实时计算飞机当前所在航段、判断当前驶入驶出方向以及判断当前位置是否满足驶入驶出限制条件,驶入驶出预处理模块的计算结果,将决定系统是否满足开始滑行的条件,否则系统将禁止驶入驶出指令。
自動驶入预处理模块在完成航路加载后立即启动,判断飞机当前状态是否满足驶入条件。当无人机处于自动驶入过程中时,驶入预处理模块停止计算。当无人机遭遇故障或人为中止退出驶入过程后,预处理模块即时启动并再次开始判断。
自动驶出预处理模块在驶入结束后、滑行任务刹车后、起飞过程应急刹车后以及着陆接地后均自动启动,判断飞机当前状态是否满足驶出条件。当无人机处于自动驶入过程中时,驶入预处理模块停止计算。当无人机遭遇故障或人为中止退出驶入过程后,预处理模块即时启动并再次开始判断。
预先处理模块在驶入驶出过程中不执行,自动驶入、驶出预先处理模块的逻辑流程分别如图6、图7所示。
经过驶入驶出预处理后,系统将给出当前飞机所在的航段,同时给出驶入驶出的预处理状态,用于表征当前飞机位置是否满足所有的限制条件。当驶入条件不满足或者驶出条件不满足时,系统不响应驶入驶出遥控请求。
当自动驶入状态满足三种驶入方式的一种,自动驶出状态为“驶出允许”,则系统响应驶入驶出遥控请求。
2.3 导航与制导
当无人机收到驶入驶出遥控指令,且驶入驶出预处理结果满足驶入驶出要求,则驶入驶出导航与制导模块立即执行,其输出的待滑行距离、侧偏距等参数将用于速度和轨迹控制。导航与制导流程如图8所示。
2.4 控制策略与控制律
驶入驶出控制律由轨迹跟踪控制律与地速保持控制律组成,其中轨迹跟踪控制律用于保证无人机驶入驶出过程中始终沿预定的轨迹线滑行,而地速保持控制律则用于保证无人机驶入驶出过程中按预定的速度策略加速/减速滑行。
(1)轨迹跟踪控制。驶入驶出阶段,无人机速度相对较低,方向舵效率不足,因此采用前轮纠偏与差动刹车来完成对预定轨迹的跟踪控制。其中直线滑行段,仅采用前轮纠偏控制来跟踪预定轨迹;转弯滑行段,当无人机航迹角与制导模块计算得出的应滑航迹角指令相差超过一定角度,为减小转弯半径,采取差动刹车与前轮开环控制的方式转弯,当无人机航迹角与制导模块计算得出的航迹角指令相差小于一定角度,则退出差动刹车和前轮开环控制,接入前轮自动纠偏控制律。轨迹跟踪控制策略如表1所示。
前轮纠偏控制律以侧偏距和偏航角为外回路,以偏航角速率为内回路,并引入侧偏积分提高对直线段的轨迹跟踪能力。前轮纠偏控制律框图如图9所示。
差动刹车仅用于转弯滑行阶段,控制分配模块根据对称刹车指令(由地速保持控制律给出)和差动刹车指令的大小,分别生成左右刹车指令,用于减小无人机在转弯过程中的转弯半径。差动刹车控制律框图如图10所示。
(2)地速保持控制。利用制导模块给出的距目标点的待滑行距离确定滑行速度指令,以利于把握直线滑行阶段开始减速的时机,并最大程度的减小跑道占用时间。考虑到地面滑行阶段,风门对速度的控制响应较慢,无法保证速度控制精度。因此滑行过程中采用风门开环策略,以对称刹车为主要控制手段,完成对地速的精确控制。
对称刹车控制律以离散控制方式进行,对称刹车表示为左右刹车满刹,而松刹则表示为左右刹车松开刹车。对称刹车控制与差动刹车控制综合,最终输出左右刹车指令,如表2所示。
2.5 故障自动处置
驶入过程中,当机载系统出现影响起飞的一系列故障(传感器故障、舵系统故障、动力系统故障等),立即终止自动驶入,并应急刹车,同时驶入预处理模块启动,实时判断飞机位置是否满足再次驶入要求,并返回自动驶入状态;驶出过程中,仅针对机载系统出现影响驶出的一系列故障(前轮转弯舵机故障、风门舵机故障、GPS信号丢失等),系统自动中止自动驶出,并应急刹车,同时启动驶出预处理模块,实时判断飞机当前位置否则满足再次驶出要求。
3 试验验证
为验证以上驶入驶出预处理算法、轨迹跟踪、地速保持控制策略与控制律的有效性,进行了样例无人机实际驶入驶出试验验证。试验过程中,通过将飞机摆放于不同的停机位置,验证了自动驶入功能的正确性与完整性;通过采用不同的驶出方式(滑行后驶出、驶入结束后驶出),验证了自动驶出功能的正确性与完整性。本文以停机坪驶入、驶入后立即驶出方式为例,将飞机初始垂直停放于距滑行线约200米的停机坪,随后自主驶入至起飞点,到达起飞点后随即自主驶出,直至飞机最终刹停于预先规划的驶出停止点,驶出停止点位于滑行道上,其相对起飞点的机场坐标为[2019.3,-217]。驶入驶出过程所获得的试验曲线如图11~14所示。
由图11~14可以看出,无人机从机场坐标为[5,-220]的停机位开始自动驶入,初始航向约为287°(垂直于目标滑行线),第533s左右无人机开始左转弯,由于导航模块目标航段切换,产生约-21m的侧偏距,而无人机转弯完成时的侧偏距约为-2.6m,反应出无人机实际转弯半径约为18.4m,与理论计算得出的19.5m基本吻合,且实际转弯半径偏小与转弯过程中启用差动刹车相关;直线驶入阶段的最大速度约为17km/h,随后随着无人机距转弯目标点越来越近,在地速控制律作用下,速度逐渐降低至8km/h,并以8km/h转弯;自动驶入全程,无人机侧偏控制在±2m范围内(-21m的侧偏距由于航段切换产生,非控制误差),速度控制误差在±2km/h范围内,无人机最终停止于机场坐标[-0.4,0]处,反应出无人机能精确刹停于起飞点,并自动退出驶入过程,等待起飞或驶出命令。
驶入过程结束后,无人机从机场坐标为[-0.4,0]的起飞点直接自动驶出,驶出过程由于距转弯目标点的距离长达2800m,因此驶出过程中最大速度达50km/h,在距转弯点距离为500m时,系统控制无人机自动减速,并在距转弯点100m处减速至8km/h,随后以8km/h转弯,侧偏距变化趋势与自动驶入过程一致,均小于2m,驶出全程偏航角均小于3°,并最终停止于机场坐标[2019,-216.8]处,与预先标定的驶出停止点相差小于0.5m,反应出飞机能精确停止于预先规划的驶出停止点。
综上,实际滑行验证试验表明,样例无人机的驶入驶出采用了智能化设计理念,功能完整,控制精度较高,使用灵活方便,满足了实际工程应用的需求。
参考文献:
[1]魏文领,杨国强,记多红.无人机自动滑出滑入控制技术研究[A].第四届中国无人机大会[C].2012:451-455.
[2]朱天文.飞机地面操纵转弯半径和转弯速度计算方法研究[J].飞机设计,2003,9(3):31-34.
[3]张明廉.飞行控制系统[M].北京:航空工业出版社,1993.
[4]贺成龙,陈欣,李春涛.无人机地面滑行自主起飞的建模与控制[J].航空学报,2008(S1):215-219.
[5]高金源,焦宗夏,张平.飞机电传操纵系统与主动控制技术[M].北京:北京航空航天大学出版社,2005.
[6]Joseph S. Brinker, Jeffrey M. Barker. Formation Taxi and Flight of the Joint Unmanned Combat Air System (J-UCAS) X-45A Vehicles[J]. AIAA2005-6192.
