矿用带式输送机智能监测及故障预警系统研究
2020-06-22郭志
郭 志
(山西煤炭进出口集团 左云长春兴煤业有限公司,山西 大同 037100)
0 引言
带式输送机作为一种大型运输机械设备,具有运输量大、运送距离长、可连续运输等优点,是煤矿开采生产中最理想的运输工具[1]。如今煤矿中带式输送机使用比率越来越高,设备的功率、性能等方面都得到不断提升,所以搭建一个智能、完善的监测预警系统对带式输送机整个工作线工况的监控以及故障诊断预警是十分有必要的[2]。
本文提出了矿用带式输送机智能监测及故障预警系统的设计,在对各类需采集的运行参数和故障因素分析的基础上,利用PLC作为控制器,选择所需传感器的类型,确定了系统组成,最终实现输送机的实时监控、数据通信、数据显示、故障定位预警等功能。
1 智能监测及故障预警系统整体设计方案
系统采用模块化结构,按照不同功能将系统进行模块划分,实现对运行中带式输送机各状态参数的实时监测和自动控制。系统整体分为两大部分:第一部分为主控模块,其中包括PLC核心处理器、监控上位机、回路配电控制模块、沿线设备控制模块、预警模块、I/O接口模块,监控上位机与预警模块、I/O接口模块和沿线设备控制模块间信息的上传下达通过CAN总线完成,各回路配电模块通过RS485总线与上位机通信[3],第二部分为沿线设备,带式输送机现场沿线设备包括不同位置的下位机模块、急停闭锁模块、语音电话模块、数据采集终端等,通过通讯电缆、闭锁线、音频线、18 V电源线与主控模块连接。系统整体结构如图1所示。
主控模块中,监控上位机上运行着系统界面,实现人机交互;组合配电控制模块用于控制带式输送机上的驱动电机、抱闸电机等多台电机,并提供照明和过流、断相、漏电保护功能;语音预警模块与沿线的多功能语音电话通过音频线相连,用于信息的传达、人员通话和发生故障时的警示、报警等;沿线设备控制模块用于现场设备采集的信息和上位机指令间的上传下达,起到了信息中转站的作用;I/O模块用于不同开关信号和模拟量的采集,通过CAN总线与监控上位机进行通信,内置的继电器可控制各组合配电控制模块对电机下达动作指令[4]。

图1 系统整体结构图
沿线的现场设备中,多功能语音电话主要用于井下通信,与主控模块的语音预警模块相连;急停闭锁模块用于维修或故障时的停机以及急停控制,急停信息通过RS485总线上传到监控上位机;不同位置的下位机模块用于带式输送机各种运行状态参数的采集,同时具有控制和急停的功能;数据采集终端位于设备线路末端,可实现电压采集、上传设备信息等功能。
2 硬件方案设计与选型
2.1 PLC选型
基于井下特殊环境对控制器处理速度、精确度和结构的要求,本文采用西门子S7-300可编程控制器作为主控制器。S7-300 PLC是一种模块化的通用型控制器,处理速度快,扩展性好,空间占用小,同时支持多种通讯协议,兼容性好,适用于井下工作环境。
2.2 传感器选型
在传感器选型前首先应确定系统需要监测的参数。在带式输送机运行时,针对跑偏、撕裂、超速、打滑、烟雾超标等故障需要对其速度、温度、张力、振动、电流、环境烟雾值等参数进行检测。
2.2.1 温度传感器选型
温度传感器主要用于防止皮带滚筒发生摩擦起火或电气设备过热而引起的事故,本文选用KGW200H型矿用温度变送器,工作电压为DC+12 V,工作电流≤50 mA,测量范围为0 ℃~200 ℃,测量误差为±2.5%,满足系统要求。
2.2.2 速度传感器选型
速度传感器用于检测输送机的运行速度,防止其发生打滑或超速[5],本文选用GSC6-SC本质安全型转速传感器,其安装位置与运输带紧密接触,GSC6-SC的工作电压为DC+12 V,工作电流≤80 mA,测速范围为0 m/s~6 m/s,测量误差为5%,满足系统要求。
2.2.3 撕裂传感器选型
撕裂传感器用于检测皮带是否发生纵向撕裂的情况,将撕裂传感器安装在机尾返回皮带上方,给传感器设置一个重量阈值,当皮带发生撕裂时,传感器上的物料重量超过阈值,此时由传感器发出预警信号[6]。本文选用GVY25本质安全型撕裂传感器,当传感器接收到大于25 g/cm2的重量作用时便输出≤500 Ω的低阻值,正常情况时传感器输出高阻值,以此来发送故障信号。
2.2.4 张力传感器选型
张力传感器的作用是检测出带式输送机运送带的张力值后将该值反馈至监测控制系统,从而对张力进行调节控制,解决输送机因张力突变而引起的打滑、撕裂等问题。本文选用GAD80本质安全型张力传感器,其测量范围为0 kN~80 kN,测量精度≤2%,输出信号为DC4 mA~DC20 mA,符合本系统要求。
2.2.5 跑偏传感器选型
跑偏传感器一般安装在机架两侧,用于检测运送带位置,防止其跑偏到滚筒一侧。本文选用GEJ-15-P型跑偏传感器,工作电压为DC+12 V,工作电流≤30 mA,动作角度和复位角度均满足系统所需精度要求。
2.2.6 振动传感器选型
振动传感器主要用于测量输送机上可产生振动的主要设备的振动信号,并控制振动量。本文选用GBYD5本质安全型振动传感器,测量峰值为100 g,轴向灵敏度为50 mV/g±5%,最大横向灵敏度为5%,满足本系统要求。
2.2.7 电流传感器选型
电流传感器主要用于各电机工作电流的采集,在电机进线处设置[7]。本文选用WBI414S43型电流传感器,其工作电压为DC+12 V,线性度为0.5(%F.S.),满足本系统要求
2.2.8 烟雾传感器选型
当输送机出现由于电缆过热、皮带摩擦过热等问题引起的火灾时会产生大量烟雾,将烟雾传感器装设在下风口处进行检测,以防止火灾事故的发生。本文选用GQQ0.1本质安全型烟雾传感器,灵敏度为Ⅱ级,动作值≥0.1 g/m3,响应时间≤ 30 s[8]。
3 软件设计方案
系统开始运行时首先初始化各模块,然后对沿线设备进行地址的自动排列和分配,并检查各设备工作状态,若无故障发生则正常启动,否则排除故障后才能启动。按下启动按钮,上位机对张紧电机发送启动信号,张紧电机将张力调节到正常值并发送反馈信号;上位机接收到张紧反馈信号后,向驱动电机发送启动信号,启动电机进行软启动并反馈;上位机接收到软启动反馈信号后,向抱闸电机发送启动信号,抱闸电机执行松闸操作;全部操作执行完毕后,上位机接收到启动完成信号,带式输送机完成启动并开始正常运行,图2为带式输送机启动流程图。

图2 带式输送机启动流程图
运行过程中,若监控上位机检测到来自传感器的故障信号时,系统会进行故障的全面诊断,并根据结果进行报警不停机、报警停机、停机并洒水等操作。当按下急停键或正常停机键后,系统控制电机完成停机,图3为故障检测和停机流程图。
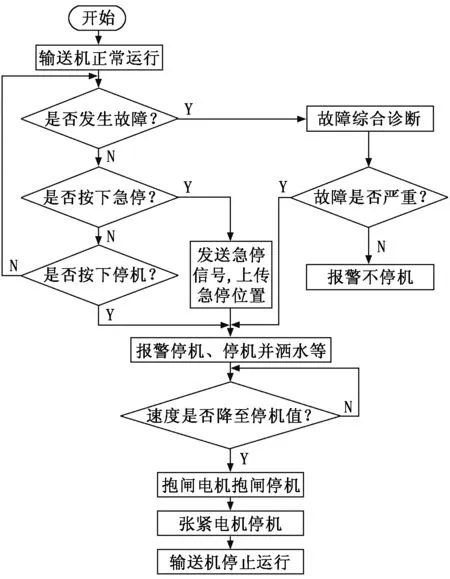
图3 故障检测与停机流程图
4 系统运行效果
在实验室搭建的系统测试平台对本文设计的监测及故障预警系统进行了测试运行,结果表明传感器数据采集、故障诊断定位、通讯、数据实时显示等功能运行正常。最终系统试运行效果良好,实现了带式输送机工况监测和故障综合诊断的结合,系统操作方便、功能较全,符合实际使用需求,图4为监控系统数据查询界面。

图4 监控系统数据查询界面
5 结束语
本文针对传统带式输送机监控系统实时性差、功能单一等缺陷,以PLC为主控器,辅以各类传感器和通讯技术设计了一套带式输送机智能监测及故障预警系统,实现了对带式输送机运行状态实时监测和故障综合诊断预警。经测试,系统各项功能均可良好实现,交互界面简洁人性化,达到了预期目标。
