一种自动吸尘黑板擦的设计与研究
2020-06-22蔡国庆钱新惠侯玉秋贺欢呼
蔡国庆,钱新惠,侯玉秋,贺欢呼
(河北水利电力学院 电气工程学院,河北 沧州 061000)
0 引言
随着当今社会信息化的发展,教育教学的方式也呈现出多样化的趋势,但以板书为主的课堂教学仍为当前教学的主要模式[1]。在这种教学模式下,擦黑板就成为了教学过程中必不可少的一个环节。频繁的擦拭黑板不仅浪费了教学时间,而且增加了教师和学生的劳动强度。而擦拭过程中产生的粉末四处飞扬,容易被师生吸入呼吸道,更是影响着师生的身体健康。针对上述问题,林栋等设计了一种无尘黑板擦,利用吸尘装置将粉尘吸入黑板擦内部积尘盒里[2]。李满亮等利用齿轮齿条装置设计了一款自动黑板擦[3]。吴佳等通过丝杠螺母机构设计出了无尘自动黑板擦装置[4]。
当前虽然黑板擦的设计工作取得了部分成果,但仍存在一些不足,市场接受程度低。基于以上问题,本文设计了一款4自由度的机械臂,实现擦黑板自动化的功能,并且依据吸尘器的原理,优化了传统黑板擦的结构,减少了粉尘扩散。应用SolidWorks建立了自动黑板擦的三维模型,并通过ADAMS对结构进行运动学分析,验证了结构的可行性。
1 自动吸尘黑板擦的总体结构设计
1.1 自动吸尘黑板擦结构设计要求
根据实际教学环境与教师板书习惯,自动吸尘黑板擦装置应满足以下几个要求:
(1) 设计的机械结构其运动范围应在教师板书的书写范围,并且在运动过程中不会与其他部位产生干涉现象,不会对使用者及装置造成损害。
(2) 装置应具有质轻、强度大的特点,在擦拭力的作用下,既能够保证擦拭干净,又能避免装置强度不够产生变形。
(3) 装置应有较高的工作效率,擦拭速度合理,避免擦拭时间过长,浪费教学时间。
(4) 装置应有足够的吸风量,高效地将粉笔灰尘吸收,实现除尘的目的。
1.2 自由度的选择
装置通过模仿人的上肢运动实现擦黑板的过程。人在擦黑板的过程中主要靠肩关节和肘关节绕垂直于黑板的轴转动,从而带动手部实现擦黑板的运动;由腕关节的转动控制黑板擦对黑板施加压力,在运动过程中产生摩擦力,实现擦拭黑板的功能。
根据上述分析,同时考虑到在擦拭过程中黑板擦与黑板有效的平面接触,本装置采用4个旋转自由度实现擦拭黑板的运动。2个自由度类似于人的肩关节和肘关节,控制黑板擦的运动范围;1个自由度类似于人的腕关节,控制黑板擦对黑板施加压力;1个自由度调整黑板擦与黑板的接触形式,保证可靠的面接触。
1.3 自动吸尘黑板擦结构设计
1.3.1 结构设计
依照大学教室黑板的安装尺寸,对自动吸尘黑板擦进行总体结构设计,装置主要由黑板、黑板擦、固定架、连杆、电机及减速器、连接架、软管、吸尘装置等组成,如图1所示。其中连接架8的两端分别与电机7与黑板擦9连接,与电机是固连,将随电机一起转动;与擦头通过螺栓连接,并且可以产生相对转动,以保证擦头与黑板面之间的面接触,如图1(b)所示。
该装置总体上是由一个4自由度的串联机械手带动黑板擦实现擦黑板的动作。电机3类似于人的肩关节,连杆4类似于人的上臂,由电机3带动连杆4实现一个旋转自由度的运动,为关节1。电机5类似于人的肘关节,固定于连杆4上,并且带动连杆6实现一个旋转自由度的运动,为关节2。电机7类似于人的腕关节,固定于连杆6上,带动连接架8转动,为关节3。连接架8与黑板擦9存在一个无驱动的转动副,为关节4。通过关节4使黑板擦9对黑板1施加压力,既保证黑板擦与黑板面之间的接触,又为擦拭黑板提供足够的摩擦力。设计的黑板擦9为中空结构,与软管10连接,在擦拭黑板过程中产生的粉尘由吸尘装置11通过连接的软管10吸入到粉尘盒中,以减少粉尘的飞散。

1-黑板;2-固定架;3,5,7-电机;4,6-连杆;8-连接架;9-黑板擦;10-软管;11-吸尘装置
1.3.2 材料选择
自动吸尘黑板擦装置的一个设计要求就是要在保证强度的前提下力求结构轻便。通过对不同牌号铝合金机械性能和物理性能的比较,选择牌号为6061的铝合金作为连杆与连接架的制造材料。
1.3.3 尺寸确定
通过对教室黑板的测量可知,黑板长为3.8 m、宽为1.2 m。考虑到实际教学情况,右半侧黑板用于投放多媒体,板书较少,故取连杆4与连杆6的长度均为1 m,即可覆盖黑板左半侧的区域。为提高工作效率,取黑板擦的面积为普通板擦的3倍~4倍。
1.3.4 驱动方式
电机驱动具有定位精度高、响应快等特点,但输出力矩较小。电机与减速器的配合可以增加输出力矩,同时具有高功率重量比,满足设计要求。因此,本研究通过3个伺服电机来驱动装置3个自由度的运动。
1.3.5 风量的选择
装置应有足够的吸风量,高效地将粉笔灰尘吸收。对不同吸风量与吸口面积进行组合测试,测试数据如表1所示。

表1 风量与吸口面积测试数据
测试结果表明,当选取风量为80 m3/h时,擦掉的粉尘可以完全被吸入,能够有效地防止粉尘的飞散,符合设计的要求。
2 自动吸尘黑板擦装置的仿真分析
2.1 建立ADAMS仿真模型
根据三维模型的结构及装置的工作原理,利用ADAMS建立仿真模型,如图2所示,各部件间约束关系见表2。

图2 吸尘黑板擦仿真模型

表2 各部件间的约束关系
2.2 吸尘黑板擦的ADAMS运动仿真
根据ADAMS建立的仿真模型,参照人擦黑板的运动规律,设置关节1的运动速度为15°/s,关节2的运动速度为40°/s,通过传感器控制黑板擦与黑板接触力保持为5 N。利用ADAMS对模型进行运动仿真得到黑板擦的位移、速度和加速度曲线,如图3~图5所示。通过图3~图5可以看出,自动吸尘黑板擦装置能够完成多关节的复合运动,并且在擦拭黑板的过程中运动较为平稳,无振动现象,可以实现整个黑板范围的擦拭,并且不会造成干涉现象,满足设计需求。

图3 黑板擦的位移曲线

图4 黑板擦的速度曲线
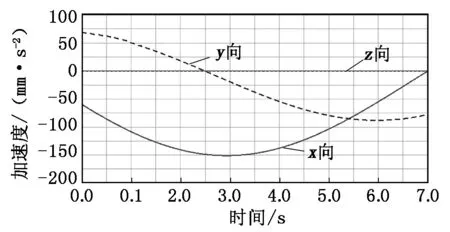
图5 黑板擦的加速度曲线
3 结论
本文以人擦黑板的运动为基础,考虑到装置的效率、选材、吸尘效果等问题,设计了一款4自由度的自动吸尘黑板擦装置,克服了当前擦拭黑板费时费力以及粉尘飞扬影响师生健康等问题。并且通过ADAMS进行运动学仿真实验,验证了装置的可行性。
