GPS-RTK技术在港口码头测量中的应用
2020-06-20沈相儒
沈相儒
(中交一航局第一工程有限公司,天津300456)
1 工程概况
天津港北港池海嘉汽车滚装码头工程建设于天津港北疆港区,该项目东侧为已投入运营的环球滚装码头。根据需求,码头岸线长565m,拟建2 个汽车装滚泊位,以停靠70 000t 滚装船为建设标准。从具体分布情况来看,本工程位于岸线转角区域,于西侧增设了长度75m 的平台段。码头采取连片满堂式的设计形式,水工建筑物是重要部分,含前、后桩台以及接岸处。
2 RTK技术的特点
沉桩作业采取GPS-RTK 技术,现场设置了基准接收机,将其有效连接至2 台流动接收机。根据施工要求,在打桩船上布置流动站,形成“海上打桩定位系统”,具体布置方案如图1所示。
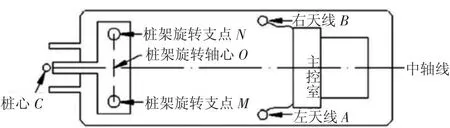
图1 流动站布置方案
为满足测量要求,共设置2 座流动站,当生成基准站信号后,经计算即可求得具体坐标关系,连接A、B两点并分别将其与桩心C相连,通过此方式即可产生△ABC,在此基础上进一步求得桩心C的坐标。
相比于传统方法,GPS-RTK 技术的应用效果更佳,具备如下5 点优势:
1)精简测量流程,实行一体化作业的方式,工程人员的室外工作强度得到大幅度缓解,在短时间内即可完成放样。
2)突破了传统方式下分级布网、逐级控制的局限性,单个测区可达到一次性布设的效果,提升了控制网的灵活性,设置的控制点数明显减少,在展开图根加密控制的同时可兼并做好碎部的测量作业。
3)提升了数据采集效率,省去了画草图环节,针对各个碎部点赋予特定的格式,具备被数字测图软件识别的特点,提升了图形编辑效率。
4)碎部量测的灵活性得以提升,不再受到图幅便捷的限制性影响,内业成图后即可采取分幅与接边处理措施,便捷性良好。
5)测量所得结果的可靠性好,在GPS 技术的支持下,可满足1∶500 图根控制所提出的精度要求,避免了误差过度集中的现象,在大比例尺测图中具有适用性。
3 施工测量
3.1 施工控制网的建立
以业主需求为准,明确测量控制基准点,创建GPS 临时基准站,为之引入了稳定性更高的双频GPS 技术,并辅以全站仪设备,实现高精度的平面控制。当形成基准点后,选择合适的区域测放控制点,后续正式施工作业时可灵活地展开平面控制作业,根据工程需求确定观测周期,即每月执行一次,分析所得数据并对不合理之处采取修正措施。
3.2 测量方法
本工程所处位置与岸线距离较远,除常规测量方式外,还为之引入了GPS-RTK 测量技术,由此创建平面控制网。根据测量需求,准备了全站仪、经纬仪以及水准仪3 类设备,协同作业并展开细部放样工作。
做好施工前的准备工作,对于测量技术人员而言应掌握图纸提及的各项要点,提升施工技术规范性,从实际情况出发生成施测方案,经技术人员审核并无误后,即可施测放样。工程中,应注重对桩位的保护,以便给施工作业提供可靠的指导。测量放线是重要的前期准备工作,要求测量技术人员具备较高的专业水平,能够全方位掌握施工图纸,评定复拟图表中各数据的合理程度,并以技术规范为准做好测量工作【1】。在此之前,要面向整个施工单位技术交底,施工人员要全面掌握沿线的各个导线点、控制桩等工程参数,经复核后再正式施工作业。
1)测量方法。引入GPS-RTK 技术,在此基础上辅以常规的测量方法,创建完整的平面控制网,以便展开测量工作。
2)控制网的建立。以控制基准点为参考,于岸侧设置GPS基准站,基于双频GPS 技术做好平面控制。考虑业主给定的基准点,选取合适的区域设置控制点,为施工环节的平面控制提供支持,观测周期为一月一次,针对所得数据加以分析,对不足之处采取修正措施。
3)打桩定位。(1)设置GPS 定位系统。从工作机制上看,基于RTK 方式可实现对船体的实时控制,诸如位置、方向等,将所得结果呈现于计算机屏幕上。将该值与设计坐标展开对比分析,调整船体位置,无误后方可下桩开打。(2)桩位校核。此环节主要目的在于提升桩位的精确性,设备为全站仪。
4)沉降及位移观测。以设计图纸为准,做好沉降与位移观测工作。为满足此要求,在地基上设置高程控制点,遵循的是每间隔50~60m 设置1 个的原则,总数量为11 个。关于沉降和位移观测点的设置,较为合适的位置是码头后方的地面上,并采取定期观测的方法。挖泥作业时的监测工作尤为关键,初期每3d 观测1 次,后续阶段以沉降情况为准做灵活调整,完成挖泥作业后评定现场稳定程度,可采取每10d 观测1 次。沉降观测的可行设备为自动安平水准仪,将控制点作为起算点,形成一条闭合性质的线路,求得沿线各点的高程值。关于水平位移的观测,此环节所需设备为全站仪,以控制点为基准,评定各点与之产生的位置关系,并对比分析。
5)岸坡观测。(1)关于沉降位移观测点的设置,具体方式为沿码头纵向设置,彼此间距控制为100m。(2)提出如下几点观测要求:初期加大观测频率,采取1d 观测1 次的方式,结束所有桩基施工并且达到相对稳定的状态后(通常需经过5d),即可终止观测。在此过程中,若变形曲线表现出变陡的趋势,需暂停施工作业,并加大单日观测次数,针对特殊区域采取针对性观测措施。确定控制标准,即沉降≤10mm/d,位移≤4mm/d,整个阶段产生的总位移≤30mm。
6)测量资料管理。经测量后汇总资料,涉及的方面较多,如控制点验收资料、放样信息、施工以及竣工阶段各自对应的测量资料、仪器检验情况等。生成的资料应具备可保存的能力,以免出现资料遗失现象。部分资料需进行备案或交由专业人员审批,此类工作均要落实到位,且要严格遵循特定程序来展开。
4 GPS-RTK技术在港口码头测量中的应用
4.1 创建基准站
此项工作是实现RTK 测量的关键,确定参考点的合适位置,其应当在地势较高处,并满足交通便捷的要求,以便提升卫星信号的收发效率。
4.2 设定转换参数
此处采取相对坐标与相对高程的方式。具体操作方法为:在基准站设置仪器,根据实际情况输入仪器斜高参数,使其存储于接收机中,启动蓝牙通信,实现与电台的稳定连接,给予一个虚拟的坐标后得到转换参数,获得该值后将其载入,后续即可生成相对坐标。结束基准站的设置工作后,基于相同的方式设置流动站,经配置且无误后,检验2 台流动站的工作状态,要求采集的数值应足够准确。
从实时RTK 测量工作来看,所得结果与数据链性能存在密切的关联,且均为独立观测的方式,考虑到数据的可靠性要求,必须在观测前做好准备工作,即对已知点比测,基于此途径分析基准站和移动站参数配置情况,并评定数据链通信的稳定程度。要求检测时间相对较长,以更为准确地分析仪器工作状态,提升检测结果的可靠性。
4.3 内业成图
需明确的是,外业RTK 测量文件采取的是特定的数据库文件格式,其特殊性在于无法被成图软件调用。基于此,应启用“导出”功能,将项目文件载入计算机中,经转换处理后使其成为通用格式,并在CASS 绘图软件中打开,综合参考外业草图,高效完成纵断面成图作业。
4.4 灌注桩RTK与常规测量的比较分析
在施工定位中,按照监理和甲方的技术要求,采用全站仪进行施工定位放样,但受施工场地空间限制,加之运输车辆比较多,钻探机器分布比较密集,测量定向通视常常被遮挡,严重影响施工进度。同时,由于施工现场地质条件影响,现场基准点可能分布在较远区域,在灌注桩施工区域受地质因素影响常常发生位移和沉降,不适合加密控制点,进而影响工程常规定位精度。为了按时保质保量地完成工程施工的需要,采用新的方法和技术RTK 进行施工。在使用RTK 测量时,应采用带简易脚架的对中杆,以提高对中的精度。为了提高施测精度仪器采用双星GPS,其可以有效地提高卫星观测数量,并且对2 套卫星进行互检校正。在建设方提供的控制点的基础上进行RTK 测量,并且采用全站仪进行检查,发现其平面位置可以满足精度要求,但高程精度达不到技术要求。考虑到灌注桩后期破桩头需要采用水准仪精确标定高程,所以,对高程的精度可以放宽到±30mm。
5 结语
RTK 技术的适用性较强,在科技水平逐步提升之下,其在测绘工作中取得了一系列成果,能够为港口码头的测量提供技术支持,确保各环节施工作业的可靠性。对于技术人员,则要突破传统技术的束缚,从行业内积极学习先进技术,将其灵活应用于工程中,助力工程事业的发展。
