低成本实用型旋转变压器解码系统设计
2020-06-19张伟鹏杨瑞峰郭晨霞
张伟鹏 杨瑞峰 郭晨霞
摘 要: 目前,测量角位移的光电码盘体积大而且对使用环境要求苛刻,不适用于某些特殊场合,如果直接使用旋转变压器测量,又因为其输出信号中混合有许多杂波信号,所以给精确解码造成了很大困难。因此,设计通过使用AD公司的专用解码芯片AD2S1210配合STC89C52单片机以及外围的调理电路、滤波放大电路等构成的旋转变压器角位移测量系统来满足工程中角位移测量精度高的需求。通过搭建角位移测量系统的实验平台对实验数据进行分析后,得出最终解码角度误差可达到0.055°,可满足一般的应用需求,具有较高的实际应用价值。
关键词: 角度跳变; 角位移测量; 巴特沃斯滤波; 光电编码器; 闭环角度跟踪法; 角度解算
中图分类号: TN76?34; TM383.2 文献标识码: A 文章编号: 1004?373X(2020)09?0154?03
Design of decoding system for low cost practical rotary transformer
ZHANG Weipeng, YANG Ruifeng, GUO Chenxia
(School of Instrument and Electronics, North University of China, Taiyuan 030051, China)
Abstract: At present, the photoelectric code disc used to measure the angular displacement is large and demanding in service environment. Therefore, it is not suitable for some special occasions. However, if the resolver is directly used to measure the angular displacement, it is very difficult to decode accurately because of the clutter signals mixed in the output signal. Thus, in this design, the resolver angular displacement measurement system composed of AD2S1210 special decoding chip of AD company in combination with SCM STC89C52, as well as peripheral conditioning circuit and filter amplifier circuit, is used to meet the need of high precision of angle displacement measurement in engineering. The experimental platform of angle displacement measurement system is built and the experimental data are analyzed. It shows that the final decoding accuracy can reach 0.055°, which can meet the general application requirement. Therefore, it has a high value in the practical application.
Keywords: angle jump; angle displacement measurement; Butterworth filter; photoelectric encoder; closed?loop angle tracking method; angle solution
0 引 言
在伺服控制的许多领域需要角位移传感器来获取轴角位移,而大多数获取轴角位置的传感器分为光电编码器、磁编码器。而这些传感器的体积、使用条件和价格昂贵,限制了一些对成本、精度要求不高的产品的使用。在此背景下,旋转变压器由于其体积小、稳定性高、寿命长、耐油污、抗击压等优点,成为角位移测量领域非常好的选择。但是目前通过算法实现的解码对微处理器性能要求高,而且价格昂贵,不利于推广[1?5]。本设计采用专用的解码芯片AD2S1210,配合外围电路和STC89C52单片机,严格控制成本,在价格低廉的情况下,也使解码精度达到0.055°,满足了大多数领域的使用,稳定性好,对产品的普及有非常大的实用价值。
1 正余弦旋转变压器工作原理
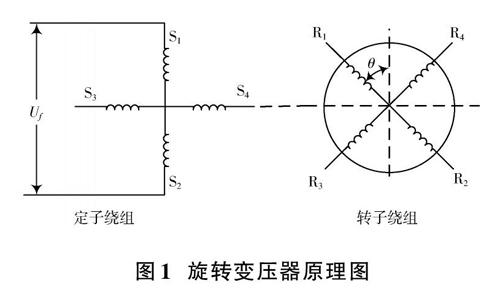
正余弦旋转变压器的原理图如图1所示。其中,[S1]/[S2]和[S3]/[S4]为旋转变压器的定子绕组,[R1]/[R2]和[R3]/[R4]为旋转变压器的转子绕组。在旋变的定子绕组[S1]/[S2]接交流激励电压为[Uf],频率为[f]时,理想情况下,两个转子绕组产生两路正交幅值的调制信号[6?7],如式(1)所示:
[ErA=4.44fNrkNr?mcos θ=kufcos θErB=4.44fNrkNr?msin θ=kEufsin θ] (1)
式中:[?m]为轴线[S1]/[S2]的脉振磁场;[f]为激励信号频率;[k=NrKNrNsKNs]为定转子上两组绕组上的有效匝数比值,[Ns]为定子绕组的匝数,[Nr]为转子绕组的匝数,[KNs]为定子绕组的绕组系数,[KNr]为转子绕组的绕组系数;[uf]为定子端输入的激励信号[8]。
2 硬件设计
该设计以AD2S1210作为解码芯片,结合外围电路的搭建进行单片机编程,通过上位机界面读出角度信息。
2.1 AD2S1210工作原理
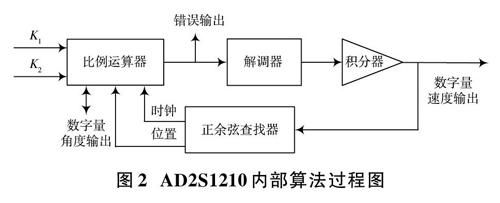
AD2S1210的工作过程主要由内部集成的激励信号发生器向旋转变压器提供激励信号,将承载位置信息的两路正余弦模拟信号输入到解码芯片中,经过二阶环路跟踪输入信号,并将正余弦输入端的信息转换为输入角度和速度所对应的数字量[9]。其二阶角度解码算法如图2所示。
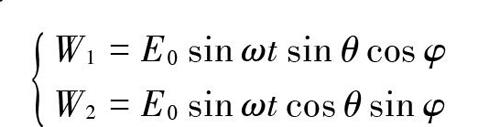
图2中的[K1=sin θsin ωt]与[K2=cos θsin ωt]为旋转变压器输出给AD2S1210的解码信号,[ω]为旋转变压器激励信号的角频率,[θ]为旋转变压器定、转子相对位置,[φ]由AD2S1210的解码系统产生,其原理为:转换器内部的模拟乘法器将旋转变压器的输出信号[K1]与[cos φ],[K2]与[sin φ]分别按一定的衰减系数进行乘法运算得到[10?11][W1]和[W2]如下:
[W1=E0sin ωt sin θcos φW2=E0sin ωtcos θsin φ] (2)
将式(2)的两项做差后得到[Ur]为:
[Ur=E0sinωt(sin θcosφ-cos θsin φ)=E0sinωtsin(θ-φ)] (3)
利用解调器内部合成的基准信号来解调式(3)后得到式(4),在式(4)中,当[θ-φ≈0]时,有[sin(θ-φ)≈θ-φ],利用角度跟踪使得[U=0]时,则[θ≈φ],便完成了角度解码,其角度解码的角度值为[φ]。
[U=sin(θ-φ)] (4)
2.2 外围电路设计
该外围电路主要由主控制单片机、解码转换器AD2S1210、旋变激励信号的滤波放大电路、旋变输出信号的滤波调理电路等构成。其中,激励信号滤波放大电路如图3所示,其解码芯片输出有很大噪声的激励信号[exc],[exc],通过该电路滤波放大后输出给旋转变压器。经实测该电路相移10°左右,小于解码芯片的锁相误差范围±44°。调理滤波电路如图4所示,由于旋转变压器内部存在共模、噪声等干扰,导致输出两路正余弦信号,波形失真严重,并不能达到理想的要求,虽然对旋转变压器一次侧绕组D3/D4短接,其余绕组按之前接法,但旋变输出信号仍然不理想,经过图4电路后输出信号达到了解码要求。
3 软件设计
软件设计包括上位机软件设计和下位机软件设计。首先对下位机软件进行详述,其包括系统复位、初始化配置、获取命令、运行状态等,如图5所示。上位机软件如图6所示,为LabVIEW编写,该上位机软件主要负责为用户提供所需功能,包括串口设置窗口、角位移波形窗口、写入串口、读取缓存区、保存数据、退出程序、停止采集按钮。能够实现实时输出角度位置信息和角位移波形曲线,对于其输出的角位移信息可以实现文本保存和数据回放。
4 系统测试及结果分析
在该系统测试过程中,如图7所示,搭建角度测量系统,其所用到的仪器主要有:旋转变压器、解码系统电路板、笔记本电脑、光电编码器、安捷伦示波器、直流电源、固定支架、联轴器。其中,直流电源给解码系统提供15 V供电,示波器用来观测AD2S1210输出激励信号的波形和旋变输入给解码系统的波形,光电编码器用来与旋变输出角度值作对比,固定支架用来把旋变和光电编码器转轴通过联轴器紧密固定。将旋转变压器接在解码系统板上,把光电编码器放在支架上,通过联轴器与旋转变压器转轴固定,此时要注意,二者必须保证同轴度,解码系统板通过串口线与电脑连接,打开测试软件,调整旋变,直到旋变测量系统输出值为0,此时,将光电编码器输出清零作为初始,所测得的数据经过处理后如图7所示。
由图8可以看出,在16位分辨率下,误差达到了10 LSB,精度为0.055°。分析误差原因主要来源于光电编码器自身也存在误差,还有解码系统电路中元器件的精度与温度影响,都会影响解码性能,给解码系统的测试结果带来误差。
5 结 语
本文基于AD2S1210解码芯片配合STC89C52单片机,通过分析解码原理与外围电路的搭建分析,搭建了角位移测量系统的实验平台。利用LabVIEW编制的上位机界面进行数据采集,通过Matlab进行数据分析,最后得出该解码系统精度达到0.055°,可满足一般的应用需求。由于该解码系统元器件选择和线路的屏蔽不好,会受环境中其他噪声的影响,导致解码出现误差,今后在设计优化过程中,一方面从元器件选型入手,另一方面从信号屏蔽入手,进行更深入的研究。
参考文献
[1] 帅浩,杨瑞峰,郭晨霞.旋转变压器的数字解码算法研究[J].中国科技论文,2014,10(9):1192?1195.
[2] 崔业兵,许敬,李裕,等.电动伺服旋转变压器的激磁放大电路研究[J].现代电子技术,2016,39(24):167?171.
[3] 郭晨霞,杨瑞峰,帅浩,等.旋转变压器的低成本角位移测量系统[J].中北大学学报,2016,37(3):304?310.
[4] 李育龙,皮大伟,闫明帅.基于AD2S1205的旋变解码系统设计[J].电子技术应用,2018,44(9):71?74.
[5] 庞岳峰,陈建友,樊全鑫,等.双通道旋转变压器解码算法改进[J].电子科技,2018,32(1):1?5.
[6] 刘芸邑,郑婕,李燕,等.基于AD2S1210的旋变解码电路设计[J].紅外技术,2016,38(12):1042?1046.
[7] 程胭脂,麻友良,李乐荣,等.旋转变压器软件解码系统研究[J].科技通报,2016,32(8):186?120.
[8] 李长兵,吴玉新,杨怀彬.基于TMS320F2808的旋转变压器数字解算方法[J].微电机,2014,47(8):57?60.
[9] 艾胜,任强,程思为,等.一种大功率永磁电机旋转变压器位置补偿方法[J].电力电子技术,2018,52(2):13?15.
[10] 刘记龙,肖飞,麦志勤,等.一种简便高效的旋转变压器位置信号滤波算法[J].电力电子技术,2017,51(6):95?97.
[11] 李伟伟.旋转变压器轴角数字变换技术(一)综述[J].伺服控制,2015,7(5):72?76.
[12] 张健,吴忠.旋转变压器输出信号自动标定[J].北京航空航天大学学报,2014,40(3):383?388.
