群机器人目标围捕系统设计与性能测试
2020-06-18朱建军张亚超
朱建军, 李 冰, 张亚超
(郑州科技学院电气工程学院,郑州450064)
0 引 言
目前单一机器人系统已经完全不能满足人们日常生活、工作和学习中对于繁杂事情的需求,繁杂的工作对于单个机器人来说,可能超出了它们的能力范围,但是对于多个机器人来说,它们可以通过机器人群系统实现相互之间的协同配合,这样不仅可以完成繁杂的工作,而且还提高了完成任务的效率,因此群机器人技术开始发展起来,逐渐成为机器人技术的一个重要分支[1-3]。对群机器人系统而言,它的研究内容主要有群机器人体系结构、单个机器人对环境的感知、群机器人系统中的信息融合及协调协作、系统的整体性能评价,其中最大的难点就是对群机器人系统中各个机器人之间协同配合的研究[4]。机器人群的围捕任务对于群机器人之间协同配合的研究具有极高的参考价值。如何实现多个机器人之间的协同配合已经发展成为目前机器人技术研究领域的一个新的方向,具有重要的现实研究意义[5-7]。高科技研究者现在对多个机器人组成的群机器人系统产生了浓厚的兴趣,有关群机器人的研究工作均成为了机器人技术研究方面的关键项目[8]。有关群机器人系统的研究,一个很重要的问题就是系统中各个机器人之间的协同配合,选择以“围捕”为任务的研究课题给群机器人之间协同配合的研究提供了优质的素材[9]。它涉及群机器人的动态路径规划,群机器人的任务级协作协调等方面的问题,对群体机器人的研究与发展具有重要意义,是一个值得关注与持续研究的问题[10-12]。
本文利用4 辆智能小车组成微群,完成了机器人群目标围捕系统设计中围捕方案的设计和方案演示,并且利用多功能机器人群目标围捕系统进行了实验验证和性能测试。
1 围捕方案设计
1.1 所需围捕的环境
机器人群所需围捕的环境如图1 所示。在笛卡尔坐标系下以A(0,0)为圆心建立半径为4 m的圆,规定此圆域内为值守区域,当有目标进入此区域内将对目标进行围捕。点B(0. 4),点D(3. 46,- 2),点E(-3.46,-2)为围捕机器人初始位置,且初始姿态设为箭头指向圆心(图1 中BA、DA、EA 方向),3 台机器人组成一个内切于圆的等边三角形,并给定一个共同的初始速度v0,便于区分。记3 台围捕机器人分别为围捕机器人B,围捕机器人D,围捕机器人E(以后可简称机器人B、D、E)。
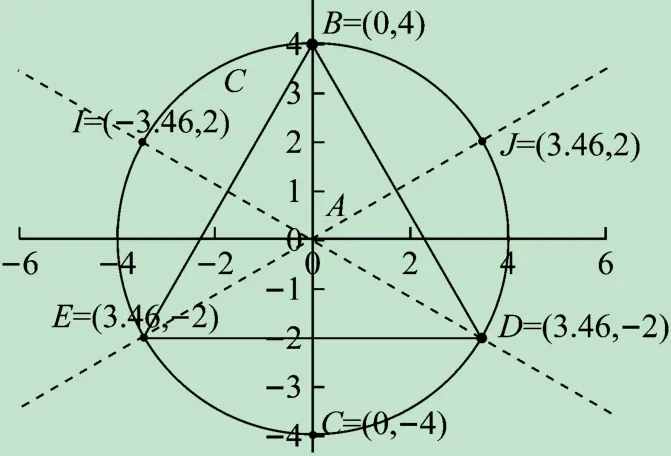
图1 围捕初始环境
在此环境下所具有的优势:①在笛卡尔坐标系下可以知晓任一点的位置坐标,便于计算围捕机器人和目标机器人的位置和姿态,简化计算[13-15]。②3 台机器人所在的特殊位置构成了对称图形,简化了流程,可以研究其中一部分情形来实现总体方案。③将围捕区域人为地分成特定部分,可在不同区域内进行不同的围捕方案。
1.2 围捕整体过程
围捕机器人到达预先设定位置进行值守,每台机器人分别负责看守自己顺时针方向的1/3 圆弧(即机器人B 看守弧BE 区域,机器人E 看守弧ED 方向区域,机器人D看守弧DB 区域),从而构成一个全域的通信系统。当有目标从机器人所值守区域进入区域时,此区域值守机器人发现目标,向其他机器人发出入侵信号,并根据入侵信息计算围捕点。其他机器人收到入侵信号,并根据入侵机器人信息计算调整角度和速度,在预期时间内到达预期围捕点对入侵机器人进行围捕。围捕流程图如图2 所示。
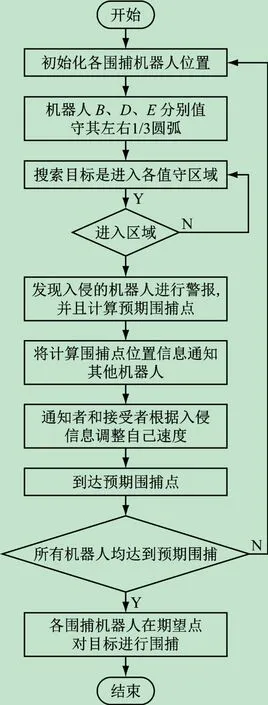
图2 围捕流程图
1.3 具体情境的围捕策略
当入侵机器人侵入值守区域时,从图3 不难看出,可以实现3 台小车对目标围捕。
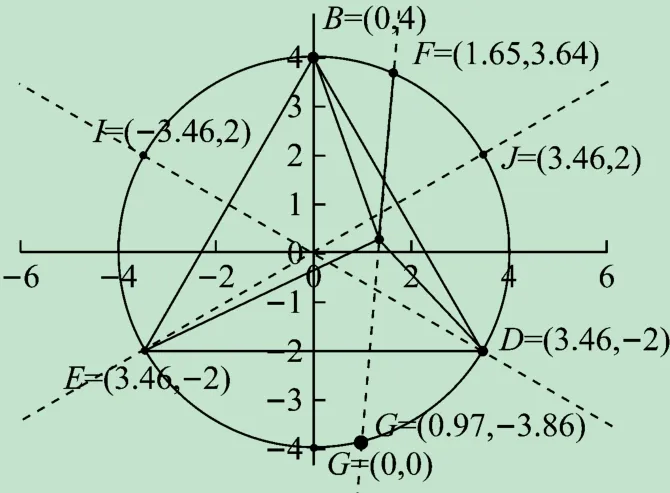
图3 当入侵轨迹经过三角形区域的围捕策略示意图
如图3 所示,围捕目标机器人的速度已知,设为vm,围捕机器人初始速度为v0,定义点H(x,y)为目标机器人入侵轨迹FG(直线方程为Ax +By +C =0,A,B,C为已知常数)上的动点,且在此点进行围捕。每台围捕机器人进行围捕所需走的路程分别为:
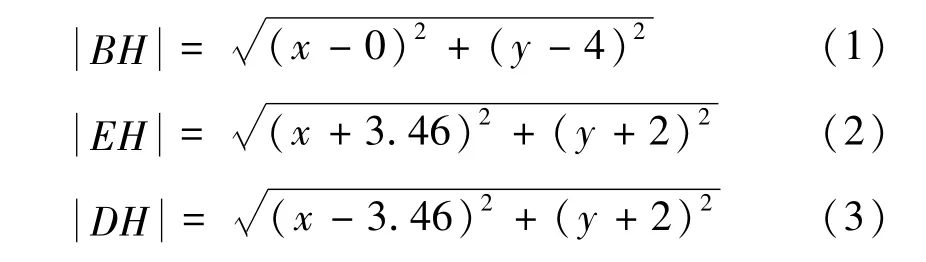
设总路程函数为:
将式(4)与Ax +By +C =0 联立,并对F(x)求导函数得f(x),可得入侵机器人运动距离为:


求得速度之比为:

根据vm和速度比即可推知各围捕机器人到达围捕点所需的速度。
2 机器人性能测试
2.1 具体情境的围捕策略
本文中多机器人选用轮式机器人中的智能小车来实现。由于围捕中小车所走的多数路径都属于直线,转向也是仅限于原地调整方位,飞思卡尔B 车模有2个导向轮,而且这2 个导向轮采用的是定向轮,2 个定向轮的轴向阻力一般大于1 个,因此这种结构很容易走直线。这种车模有2 个驱动轮,并且是用1 个电动机控制,排除了用2 个电动机控制的电动机方面的特性差异和减速机构的差异,即使有轮子瞬间打滑,存在微小障碍物等前进过程中的扰动,导致左右轮不同速,产生“走偏”现象的概率也会非常非常的小。
本次围捕设计以飞思卡尔智能车为实体完成围捕任务,选择4 台具有良好一致性的飞思卡尔智能车体,其中3 台飞思卡尔智能车作为围捕机器人进行围捕任务的执行,剩余1 台飞思卡尔智能车作为入侵机器人,执行入侵任务。
2.2 基本功能测试
(1)控制舵机的PWM占空比分别为60%、50%、70%时小车的前轮的状态分别为正方向、右偏、左偏,实物图,如图4 所示。
(2)控制电动机驱动的PWM 占空比调到80%后,小车的电动机驱动和电动机可以正常工作,如图5所示。
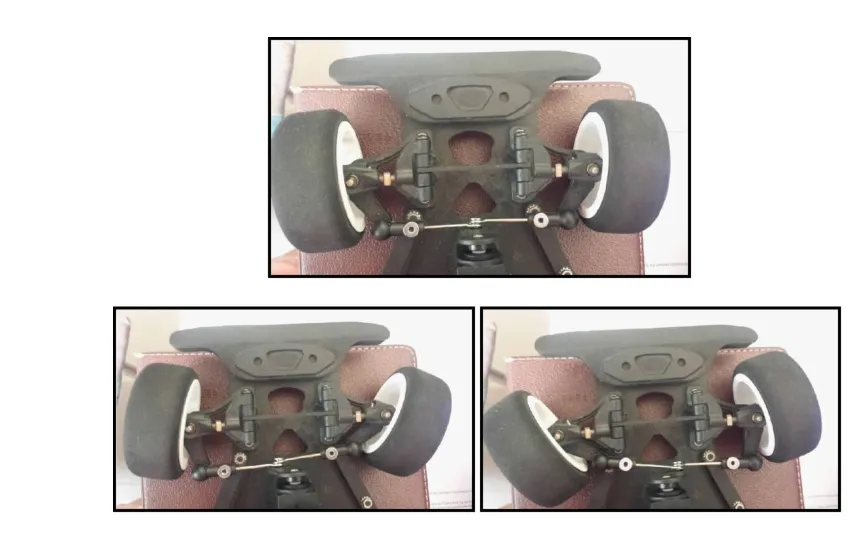
图4 小车的基本功能测试
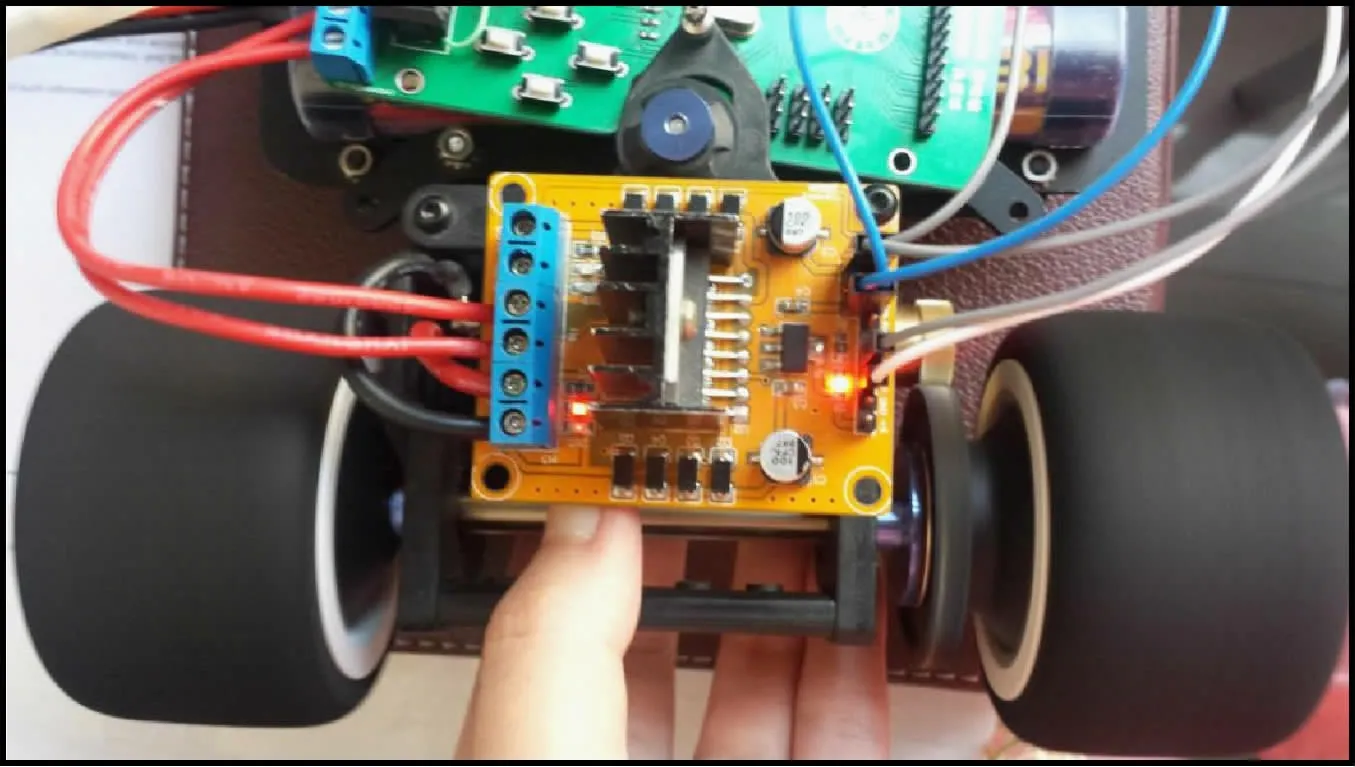
图5 小车电动机正常工作
2.3 一致性测试
在本设计中,因为需要3 辆同构造的智能小车组成智能微群对目标进行围捕,所以对于这3 辆小车就要考虑其在合作围捕过程中一致性的问题,包括:①同时打开开关观察3 辆小车能不能同时起步前进;②观察它们左右轮转向是否一致;③观察它们变速时的提速时间是否一样。
首先验证①和②:通过编写程序,然后打开开关,先延时10 s,然后前进,再延时10 s,然后左转,再延时10 s,然后右转,延时10 s,结束。在这个过程中观察4辆小车起步、左转、右转是否一致。
其次验证③:编写程序,然后打开开关后延时2 s,小车全速前进,延时2 s,小车减速,继续前进,达到目的地,结束。计算从小车开始前进到到达目的地的时间,看4 辆小车的到达时间是否一致。
2.4 小车性能良好运动距离的测试
一方面,由于硬件水平限制可以预见在一定的距离范围内小车可以保持良好的运动性能,随着距离的增加,小车的运动性能将不再稳定甚至不能满足围捕需要。另一方面。距离一再地缩小虽然可以保证小车工作状态良好但是却失去了围捕的意义,不能发挥智能车的最大效用。所以小车能够良好工作的距离对智能车群值守区域的确定有着至关重要的意义。
(1)选择光滑平面区域,设置行驶距离,分别为1、2、3、4、5、6 m。
(2)记录小车初始位置,让小车直线行驶1 m 距离。当行驶规定距离后测量偏离角度,散热片发热情况。
(3)待散热片冷却后继续进行相同操作,总计3次,记录数据。
(4)改变行驶距离,重复步骤(2)~(4)。
(5)分析数据,计算最佳范。
经分析,拟定实际围捕圆大小设为半径为3 m。
2.5 小车加速时间的测试
由于在围捕过程中设定小车的速度为匀速,而实际中小车要经过一个加速过程才会达到匀速。为了忽略加速过程的影响,决定让小车先悬空工作一段时间再进行运动,并开始计时。所以务必知道该时间。设定小车行驶距离为3 m。将PWM 占空比设为100%,达到最大速度,对其进行测量。
经过计算分析可知,当悬空时间达到6 s以上时,其速度达到匀速运动,故其加速时间为6 s。
2.6 小车速度变化范围的测试
小车的速度变化通过PWM 波的占空比来控制,通过按键的调节可以控制其占空比的变化,通过调节降低按键来降低占空比,从而降低速度。所以实验中以每两次按键调节控制速度变化,并让小车行驶距离为3 m。
通过数据分析其速度范围约为0.3 ~0.5 m/s,其中由于摩擦力和供电电压等因素当PWM 降低到一定程度后是不能小车行驶的。
3 围捕方案验证实验
进过勘察,将实验地点选择主楼二层大厅。主要因为此处具有以下优势:①地方宽广,地面平整;②瓷砖地面,摩擦阻力非常小;③室内环境不受室外风力影响;④地面为60 cm ×cm瓷砖地面,构成栅格,形成一个天然的坐标环境,省去了建立坐标系的麻烦。
3.1 围捕实验1
如图6 所示,FG为入侵轨迹,且经过圆心,此类轨迹有无穷多个,由于圆的对称性,以其中一种情况为代表,根据之前测试决定围捕圆域设为3 m,围捕目标速度定为0.3 m/s。
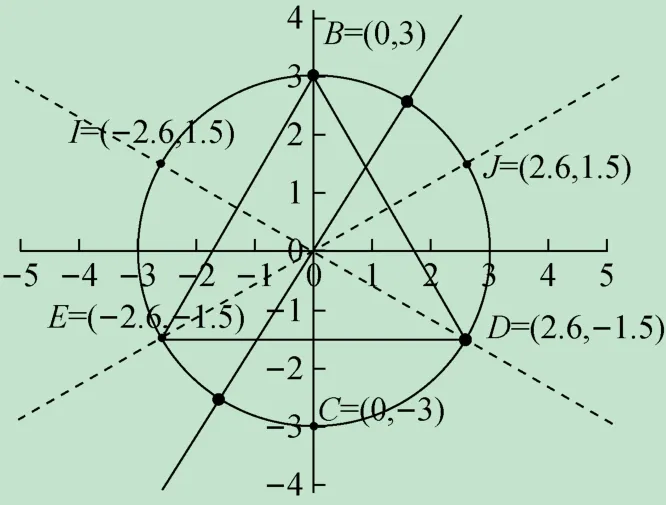
图6 围捕实验1
(1)建立坐标,设定一个圆域,各车初始位置;
(2)调整车的姿态,各车车头指向圆心,且车轮回中;
(3)给控制指令,让各小车以0.3 m/s速度同时开始工作;
(4)记录小车完成围捕的运动时间t,偏离程度,距围捕目标距离,散热片发热程度;
(5)若不满足围捕要求(记各车运动结束时距离目标距离小于目标车身长度即为围捕成功)记为围捕失败,则重复步骤(1);
(6)重复操作,记录10 组数据;
(7)整理数据,分析数据。数据如表1 所示。
表1 围捕验证实验1 的数据
3.2 围捕实验2
如图7 所示,FG 为入侵轨迹,经过点H且平行于线段BE,令车B、车E 以0.5 m/s 速度行驶,车D 以0.3 m/s速度行驶,目标机器人速度为0.3 m/s。其他实验步骤与一基本一致。实验数据见表2。
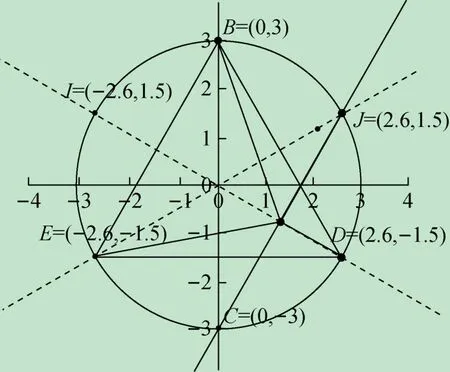
图7 围捕实验2
表2 围捕验证实验2 的数据
3.3 围捕实验3
如图8 所示,FG 为入侵轨迹,经过点H且垂直于线段ED,令车B,车D 以0.4 m/s 速度行驶,车E 以0.5 m/s速度行驶,目标机器人速度为0.3 m/s。具体实验步骤与实验1 基本一致。
经实验,以上3 组实验均能完成围捕任务,且围捕率超过70%,证明该围捕方案可行。
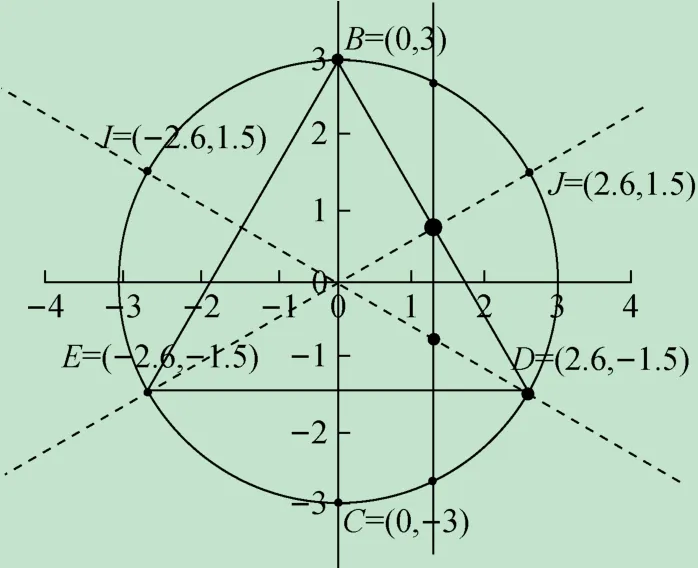
图8 围捕实验3
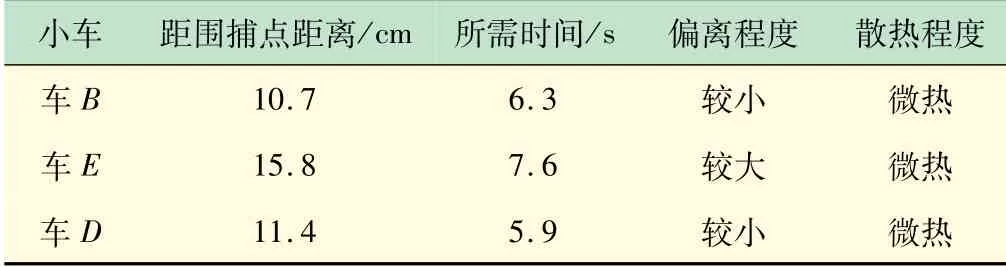
表3 围捕验证实验3 的数据
4 结 语
本文利用4 辆智能小车组成微群,通过围捕机器人的各种性能测试后,完成了机器人群目标围捕系统设计中围捕方案的设计和方案演示。通过实验验证了4 辆小车都能在程序的控制下完成指定动作,并能够完成对目标3 种不同路径的围捕,围捕率超过70%,达到预期要求。
