向家坝电站调速器主配压阀位移传感器技术改造
2020-06-18常中原卢舟鑫
刘 欢,常中原,卢舟鑫,皮 萃,杨 刚
(中国长江电力股份有限公司向家坝电厂,四川 宜宾 644612)
0 引 言
向家坝电站位于四川省宜宾市叙州区和云南省水富市交界的金沙江峡谷出口处,电站以发电为主,兼有防洪、航运、灌溉、拦沙及反调节等综合功能。左岸坝后式厂房和右岸地下厂房各安装4台80 万kW水轮发电机组,总装机容量784 万kW(含右岸坝后电站3台48 万kW水轮发电机组),多年平均发电量308.8 亿kWh。
向家坝电站调速器采用能事达公司MGC4000系列可编程微机调速器。该系列调速器采用双微机调节器作为控制核心,搭配双套电液转换机构[1],形成独立的冗余控制。调速器主配压阀位移传感器作为主配压阀的位置反馈元件,在调速器控制流程中发挥着极其重要的作用[2]。
目前,常用的位移传感器有电阻式、电容式、电感式、光栅式、超声波、雷达式等[3]。
向家坝电站调速器主配压阀位移传感器采用电感式接近传感器,在运行中,曾多次出现测值偏移抖动情况,导致主配压阀位置反馈不准确,从而引起主配压阀动作频繁、调速器耗油量增大、油温升高等问题。为了消除设备隐患,电厂对主配压阀位移传感器实施了技术改造,改造后传感器测值稳定准确。
1 改造前存在问题分析
调速器液压系统电液转换机构具备两种工作模式,见图1。在比例伺服阀(101EB)运行模式时,比例伺服阀(101EB)是输出信号压力油的主要元件,控制主配压阀(200DR)活塞运动输出压力能,来操纵接力器。 在电机(102EB)运行模式时,电机(102EB)的旋转运动转换为机械的直线位移输出,驱动引导阀上下运动,通过主配压阀(200DR)液压放大输出压力能,来操纵接力器。

图1 液压执行机构原理图Fig.1 Schematic diagram of hydraulic actuator
调速器在比例伺服阀主用工况时(A套运行),在自动或电手动工况下,微机调节器向比例伺服阀(101EB)提供电气信号,比例伺服阀(101EB)的阀芯换位,输出压力信号油。当来自于比例伺服阀(101EB)的压力信号油进入主配压阀(200DR)的控制腔时,主配压阀(200DR)的主活塞向上运动,打开关机腔的窗口,接力器向关机方向运动。主配压阀(200DR)的直线位移传感器,将主活塞的位移反馈至比例伺服阀(101EB),这时接力器继续关闭。同时,接力器的传感器也将接力器的实际开度值,反馈至比例伺服阀(101EB),当接力器运动至设定值时,主配压阀(200DR)的活塞回归中位,接力器停止在设定开度;同理,当主配压阀(200DR)控制腔的油通过比例伺服阀(101EB)通回油时,主活塞向下运动打开开机腔的窗口,接力器向开机方向运动,运动至预定开度时,传感器反馈信号,使比例伺服阀(101EB)及主配压阀(200DR)的活塞都回中位,接力器停止运动,保持在某个开度。整个动作过程中,主配压阀位移传感器起到测量主配压阀当前位置,供程序判断主配压阀是否动作到位或是否回归中位的作用,并能及时发现主配压阀动作不到位等异常情况。
主配压阀位移传感器存在的主要问题可归结如下。
1.1 传感器受环境影响大
改造前的调速器主配压阀位移传感器安装位置见图2。传感器支架为L型,不锈钢材质,通过塑料垫块安装在主配压阀端盖上。

图2 主配压阀位移传感器安装图Fig.2 Installation diagram of displacement sensor for main distribution valve
传感器工作原理见图3。 限位板与主配压阀阀芯刚性连接,阀芯移动时带动限位板上下运动。传感器安装在限位板侧面,采用施耐德公司生产的型号为XS4P18MA230系列电感式接近传感器,额定感应距离8 mm。主配压阀限位板侧面带有10°斜坡,传感器通过探测与斜坡面的距离,转换为4~20 mA电流信号输出至调速器电气柜A套模拟量输入模块(AI模块),经程序换算成限位板位置,进而得知主配压阀位置。
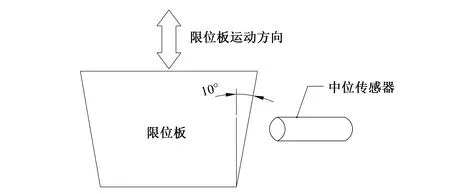
图3 主配压阀位移传感器工作原理图Fig.3 Working principle diagram of displacement sensor for main distribution valve
由于限位板从中间位置到全开全关动作范围ΔS一般为0~10 mm,故传感器测量行程ΔL可由下式计算。
ΔL=tan10°×ΔS
(1)
式中:ΔL为传感器测量行程,mm;ΔS为限位板运动行程,mm。
由式(1)可知,传感器单方向(中位-全开/全关)测量行程约为0~1.76 mm,其测量行程很小,外界微小干扰占总测量行程比例很大,因此传感器对于环境干扰较为敏感。
传感器支架采用厚度为3 mm的不锈钢材质,安装支点位于L型支架短边处,因此施加在L型支架长边顶端的微小力会产生较大的力矩,加之垫块采用较软的塑料材质,形变量较大,因此人为碰触传感器支架会对传感器测量值产生较大干扰。
实际运行时,机组开停机过程、油泵加卸载阀动作时产生的振动会使传感器测量值产生较大的跳变。此外,外部电磁场变化的干扰也会导致传感器输出的测量值不稳定,使得主配压阀调节品质下降,进而增大导叶开度调节的稳态误差、延长调节时间。
1.2 传感器安装要求高
传感器测量特性曲线如图4,其探测距离在4 mm左右时线性度较好,边缘位置线性度较差,因此传感器在安装时要尽量使其工作距离接近4 mm。这对传感器安装提出了较高要求,由于传感器拆装均由维护人员手工完成,难以保证其安装距离精确无误,传感器的非线性误差同样会影响调速系统调节品质。

图4 传感器测量特性曲线图Fig.4 Sensor measurement characteristic chart
实际运行过程中,多台机组都出现过调速器比例阀套主用时,因传感器测值不准确引起主配压阀调节周期缩短,调速器耗油量升高等问题[4,5]。
图5所示为向家坝电厂2号机组2018年6月3日11∶00开始,出现主配压阀调节周期缩短,调速器耗油量急剧升高现象。由图5可见,调速器4号压油泵加载周期(3号曲线)从11∶00开始逐渐变密,说明此时调速器耗油量明显增加,现场观察到主配压阀每隔2~3 s向开方向调节一次,液压油温度较其他机组高3~4 ℃。
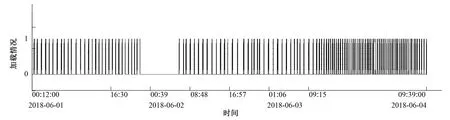
图5 2号机组液压系统4号泵加载图Fig.5 2# unit hydraulic system 4# pump loading chart
经分析认为,液压系统主油泵加卸载过程中主配压阀传感器安装基座振动导致传感器探测面与限位板斜面距离缩小,进而导致主配压阀回中时位置偏关,因此接力器向关方向漂移速度加快,导致主配压阀频繁向开方向调节以保证导叶开度与调节器输出值一致。
2 改造方案与实施效果
2.1 改造方案
针对存在的问题,提出了调速器主配压阀位移传感器的技术改造措施。主要包括两个方面,一是优化选型、改进安装方式,提高传感器硬件的抗干扰能力。二是采用软件滤波方法,把采样值中掺杂的噪声干扰滤掉。
2.1.1 传感器硬件改造
传感器硬件改造包括主配压阀位移传感器、主配压阀限位板、位移传感器托架、传感器连杆等。改造后的位移传感器见图6。传感器选择MTS公司EP系列传感器,该传感器采用磁致伸缩原理,具有精度高、非接触、可靠性高且适应于恶劣环境等优点[6]。
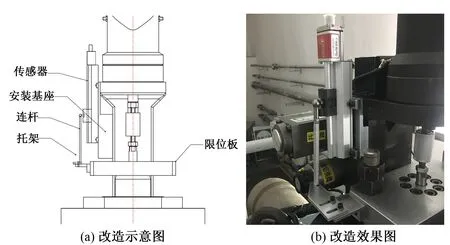
图6 改造后的位移传感器Fig.6 Modified displacement sensor
传感器安装在步进电机侧面,连杆与限位板之间通过托架连接,托架带有U型孔,可以根据限位板与传感器的相对位置调节连杆垂直度,保证连杆与限位板运动方向平行。因此限位板动作位移与传感器测量位移之比为1∶1,所以传感器对于振动引起的误差或非线性度误差不敏感。
此外,传感器安装基座上下两个螺栓分别固定于步进电机基座上,有效避免了人为碰触导致的传感器基座形变量过大的问题。
2.1.2 程序优化
在消除因传感器测量行程过小导致的干扰因素后,又针对模拟量噪声干扰优化程序。优化后,模拟量在PLC程序中采用如下流程处理:

(1)首先,根据该模拟量通道的零点值与满点值,将输入值进行量程转换,转换后的值存入临时变量中。转换由下式计算。
(2)
式中:in_temp为临时变量;in为模块输入值;i_zero为通道零点值;i_full为通道满点值。
(2)其次,对本周期输入值做限幅滤波,若输入值小于输入低限值或大于输入高限值,则判断为本次输入越限,丢弃本次输入值,等待下一个周期输入。若连续5个扫描周期内输入值均越限,则报输入越限故障。
(3)若输入值不越限,则进入消陡滤波流程。对本周期输入值做跳变判断处理,判断原理见式(3)。
i_temp-i_temp_previous>i_alarm_count×i_err_off
(3)
式中:in_temp为临时变量;i_temp_previous为上一周期临时变量;i_alarm_count为跳变累计数;i_err_off为跳变阈值。
若本周期输入值与上一周期输入值之差满足式(3),则判断为本周期输入值跳变,丢弃本次输入值,等待下一周期输入。若连续5个扫描周期内输入值均越限,则报输入越限故障。
(4)最后进入中位值平均滤波流程。程序采用滑动窗口机制,设置窗口大小为5个周期,步长为1个周期进行滑动。5个周期值去掉最高值与最低值,其余3个值做算术平均值,作为本次窗口输出。
通过以上3个滤波模块,能有效减小采样值中的噪声干扰,显著提高采样值的精度。
2.2 效果评价
改造后分别进行了以下试验,维护人员手动拉拽传感器模拟人为干扰试验,见图7(a)、(b);使动力电缆中突然流过大电流产生强电磁场模拟电磁干扰试验,见图7(c)、(d);通过频繁加卸载主油泵产生振动模拟安装基座振动试验,见图7(e)、(f)。图7中,红色线为主配压阀位置给定值曲线,蓝色线为主配压阀位置反馈值曲线。从图7中可以看到,主配压阀位置反馈值跟踪给定值良好,反馈值曲线未出现跳变、越限等情况。说明改造达到预期效果。
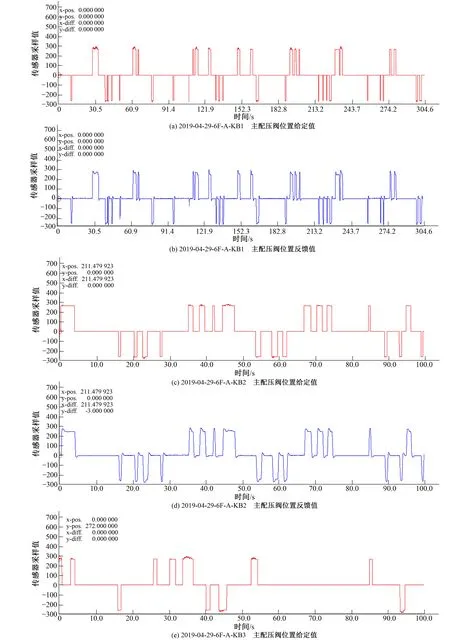
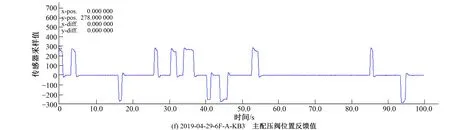
图7 6号机组改造后位移传感器采样值图Fig.7 Sampling diagram of displacement sensor after 6# unit modified
3 结 语
调速器是水轮发电机组中的重要控制设备,主配压阀是调速器的最核心部件之一,其性能和可靠性直接关系到电能质量和机组的可靠运行。主配压阀位移传感器是主配压阀唯一的位置反馈装置,其可靠性决定了调速系统的调节品质。向家坝电站经过主配压阀位移传感器改造,消除了之前位移传感器抗干扰能力差,运行不稳定的问题,提高了调速系统的稳定性。