基于时钟驯服的高精度光纤授时技术研究*
2020-06-17
1 引言
为应对传统卫星授时系统故障率高、存在安全隐患以及精度不足等问题,近年来在世界范围内广泛开展了基于光纤网络的地面授时系统研究与开发,目标是实现对卫星授时的替代或增强,降低设备安装复杂性和工程建设成本,提升网络的安全性与稳定性。利用光纤可实现比卫星更高精度的时频传递已被证实,目前研究重点是亚纳秒级超高精度光纤授时技术[1-7]。根据国内外研究情况来看,亚纳秒级光纤授时技术手段众多,并且各有自身的优点和不足,可将其大致分为两种:一是致力于普适性、网络化和规模化的标准协议授时技术[8];二是致力于特殊应用和极致性能的专线授时技术。
在专线授时技术方面,国内外已经开展了不同方案的光纤时频传递研究[1]。其中一种是采用时频同传的方式,即时间和频率均从源站通过光纤传递至目标站,大部分研究均采用该方法,优点是在一定距离范围内时频传递精度高,但随着距离的增长,由于光纤的色散效应和温度效应,频率容易劣化,目前传输距离研究基本在几百千米以内。另一种是只传递时间不传递频率,可通过时钟驯服技术在目标站重生与源站同步的频率信号,该方法理论传输距离远,且具有同步保持能力,上海交通大学和解放军理工大学有不同程度的研究[9-10]。
本文介绍了一种基于时钟驯服的亚纳秒光纤专线授时技术方案,进一步研究光纤授时距离扩展、时间同步伺服以及同步保持等问题。一方面基于低速信号编码传输技术和宽量程时间间隔测量技术可实现授时距离的超远程扩展;另一方面利用铷原子钟频率稳定度高、可驯服等特性,通过PID技术驯服重生与参考钟源高度同步的时频信号,不仅能实现高精度授时,而且具有故障中断后的同步保持能力,增强系统的可靠性。
2 光纤授时系统实现方案
光纤授时系统采用单纤双向法实现时间传递,方案如图1所示。系统采用信号环回法(Round-Trip)测算链路传输延时,以主站发出1 PPS信号上升沿时刻作为计时起点,并将1 PPS进行编码和电/光转换,通过λ1光波长信道传递至从站端;从站接收λ1光信号并进行光/电转换后,其中一路输送至内部解码单元进行信息提取,另一路直接通过电/光转换从λ2光波长信道回传至主站;主站接收λ2光信号,通过光/电转换和解码后,提取出1 PPS信号的上升沿时刻作为计时终点。

图1 光纤授时系统实现方案
环回传输总延时delayMM可通过相位测量单元直接测得,即

为了精确计算主站至从站的单向传输延时delayMS,对光纤授时系统传输链路延时进行了建模分析:
氧化石墨烯材料表面富含多种活性基团,如羧基、羟基、羰基以及环氧基等基团,该特性使其拥有超大比表面积。氧化石墨烯复合材料优异的比表面积使其具有良好的吸附性能。常见制备类型有Fe3O4磁性-氧化石墨烯复合材料、壳聚糖-氧化石墨烯复合材料、薄膜类-氧化石墨烯复合材料、TiO2-氧化石墨烯等。

假设往返传输路径对称,则

实际上,由于往返路径的FPGA内部逻辑、PCB走线、光收发器以及收发波长之间的差异,均会引入不对称性延时,这些因素在亚纳秒级高精度授时中需要进行全面考虑,因此,将式(3)修改为

delayasy代表双向路径不对称性延时,可将其分为设备内部不对称性(delayasy-fixed)和光纤波长传输不对称性(delayasy-fiber)两个部分进行处理,即

其中FPGA内部逻辑、PCB走线以及SFP光电模块收发不对称性属于设备内部不对称延时,该部分在设备研制完成后可认为是固定的,可在设备出厂前一次性测量校准,即

在光纤介质传输中使用不同的波长来发送和接收数据,由于光纤色散,这些波长的折射率略有不同,导致往返之间的传播速度不同,通过计算光纤波长不对称系数α,可实现不同光纤长度的不对称自动校准,即

综合式(1)~(7)可得到主站至从站的传输延时delayMS,从站利用伺服控制系统驯服本地铷钟可补偿1 PPS相位延时,并重生与主站钟源高度同步的频率信号。伺服系统核心是一个PID控制器,通过在输入与反馈之间设置一个偏置值可实现相位补偿与跟踪,由于1 PPS信号需要经过解码后再输入到伺服系统,因此相位补偿值offset需在传输延时delayMS的基础上加上从站解码器的延时△dS,即

△dS也是一个固定值,可以直接测量得到。利用相位测量单元监测伺服系统的输入与输出,不断驯服本地铷钟使得相位测量值T2满足式(9),即实现了从站的相位频率与主站同步。

2 关键技术实现
2.1 编码与解码
高精度时间编码与解码方案如图2所示,编码单元实现将1 PPS信号上升沿、TOD时间码、延时测量结果和管控信息等封装成数据帧,以串行码流的形式调制在光纤波长通道中传输;解码单元则实现从串行码流中识别提取出各项信息,是编码的逆过程。编码方案借鉴了标准IRIG-B(DC)码的编码格式,采用脉宽调制的串行码可以同时传输“准时”参考标志(1 PPS上升沿)和数据。标准IRIG-B时间码凭借其优越性能,成为时统领域的一种重要的时间同步传输方式,但是码元速率只有100 bit/s,一方面速率过低不适合在商业标准SFP光模块中传输,另一方面携带信息量太少不能满足光纤授时系统需求。因此,需要在标准IRIG-B(DC)码的基础上加以改进,提升码元速率并重构帧格式[11-12]。

图2 高精度时间编码与解码
标准IRIG-B(DC)码采用脉宽调制方式编码,共有三种宽度的码元,分别为逻辑“0”、逻辑“1”和标志位“P”。IRIG-B(DC)码帧速率为1帧/s,1帧包含100个码元,每个码元的总宽度为10 ms,不同码元具有不同的脉冲宽度,“0”码的脉宽为2 ms,“1”码的脉宽为5 ms,“P”码的脉宽为8 ms。为适应光纤授时系统需求,提升码元速率至5 Mbit/s,可将标准码元的宽度按比例缩小50 000倍,即每个码元的总宽度为200 ns,“0”码的脉宽为40 ns,“1”码的脉宽为100 ns,“P”码的脉宽为160 ns。码元速率的提升,可以腾出更多的时隙用于数据传输,但不宜过高,否则将增大解码难度,并且影响系统的稳定性。
实现高精度时间编码与解码的重要环节是“准时点”的精确调制与解调,IRIG-B(DC)码用两个连续的“P”码表征1帧的开始,第2个“P”码的上升沿需与参考钟1 PPS的上升沿严格对齐,否则由于“准时点”的不准确,将直接影响传输延时测量和时钟偏差计算,最终降低同步精度。
2.2 时间间隔测量
光纤授时系统内部有两个高精度时间间隔测量单元,主站端用于测量环回传输延时,从站端用于监测时间偏差补偿量。量程和精度是时间间隔测量单元需要考虑的两项重要指标,一方面在长距离光纤授时系统中,链路传输延时较大,按1 m光纤延时约为5 ns进行估算,1000 km光纤授时系统的环回传输延时可达10 ms;另一方面,要获得亚纳秒级授时精度,延时测量精度设计预算应优于百皮秒量级。
常用的时间间隔测量方法主要有直接计数法、模拟内插法和时间数字转换法(TDC,Time-to-Digital Converter)三种。直接计数法的量程大,实现简单,但测量精度受限于计数时钟的频率;模拟内插法测量精度可达皮秒量级,但是存在非线性效应,限制了测量范围;TDC法通过门电路延迟实现时间测量,精度达数十皮秒量级,由于其速度快、结构简单以及容易集成而被广泛应用,但与模拟内插法一样,测量范围较小。
为了扩大时间间隔测量单元的量程而不降低测量分辨率,采用直接计数法与TDC法组合实现高精度延时测量,计数器用于扩展测量系统的测量范围,TDC用于弥补计数器测量精度不足[13]。测量方法如图3所示,△tREF由FPGA内部计数器直接计数得到,REFCLK是计数器的参考时钟,可使用高稳时钟源(铷钟或OCXO)保证测量精度;△t1和△t2由专用TDC芯片TDC-GP2精细测量,测量分辨率为65 ps;START和STOP分别表示测量启动信号和结束信号,时间间隔△t可通过计算得到,即


图3 宽量程高精度时间间隔测量
2.3 时钟驯服
时钟驯服系统补偿从站时钟1 PPS与主站时钟1 PPS之间的相位偏差,并且重生与主站钟源高度一致的频率信号,从而实现从站与主站时间同步[14]。时钟驯服系统构成如图4所示,核心单元包括PID控制器、卡尔曼滤波器和被控对象(可驯服铷原子钟)。

图4 时钟驯服系统构成
PID(Proportion Integration Differentiation)是一种常见的伺服控制算法,由比例单元P、积分单元I和微分单元D组成。控制原理可简单理解为:PID控制器把收集到的反馈值和设定的期望值进行比较,然后把这个差值用来计算新的输入值,通过设定合适的Kp、Ki和Kd三个参数,可以让系统的输出一直跟踪到输入期望值,并保持高度稳定性。在离散系统中,微分环节被用差分代替,积分环节被累加和代替,比例环节则保持不变,算法模型如下:

u(k)为PID控制器输出的控制值;e(k)为期望值与反馈值之差,即e(k)=r(k)-y(k);Ee为每一次运算后都累加原来的误差,即Ee=Ee+e(k)。在光纤授时系统中,r(k)为期望的时间偏差补偿量offset(式8),y(k)为实际监测到的时间偏差补偿量T2(式9)。
通过实验发现,光纤授时系统的环回传输延时测量结果存在抖动和漂移,如图5所示,绿色曲线为100 km光纤情况下的环回延时测量值。这是因为时间间隔测量系统存在高斯噪声,而且光纤容易受到环境温度的影响,传输延时会随着温度变化而变化。为减小随机噪声对驯服系统稳定性的影响,应对测量数据进行滤波处理,以提高测量结果的准确性。由于传输延时并不是固定不变的,采用均值滤波的效果并不理想,因此,系统选择了具有自适应能力的卡尔曼滤波器[15],滤波后的测量结果如图5中红色曲线所示,可见红色曲线始终保持在绿色曲线的中心,对高斯噪声具有很好的过滤效果。卡尔曼滤波算法使用前一个估计值和当前的观测数据估算出当前状态下最优估计值,因此只需要储存前一时刻的估计值以及当前时刻的观测数据,占用资源小,非常适合资源有限的嵌入式系统。

图5 卡尔曼滤波器效果
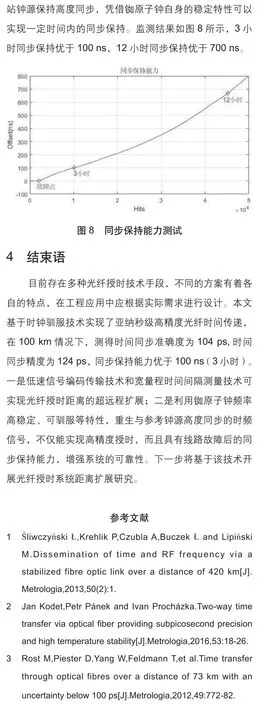
3 性能测试
搭建100 km光纤授时系统对上述技术方案进行了验证测试,如图6所示,系统组成包括光纤授时主站、光纤授时从站、安捷伦通用频率计数器53230A、计算机和G.652型光纤柜(100 km)。
在长距离光纤授时系统中,需要考虑由光纤色散引入的双向不对称延时,如果不加以修正会严重影响时间同步准确度。不对称延时大小与光纤介质材料、光收发器波长和光纤长度有关,G.652光纤色散系数理论值为17 ps/nm/km,本系统的主站和从站分别使用1550.92和1551.72波长的光收发器,可推算得100 km光纤不对称

4 Dierikx E,Wallin A,Fordell T,et al.White Rabbit Precision Time Protocol on Long Distance Fiber Links[J].IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,2016:1-1.
5 刘涛,刘杰,邓雪等.光纤时间频率信号传递研究[J].时间频率学报.2016,39(3):207-215.
6 高超,王波,白钰,苗菁等.基于光纤链路的高精度时间频率传输与同步[J].科技导报,2014,32(34):41-46.
7 瞿海燕,潘慧玲,刘芙蓉等.光纤时间频率传递研究发展态势的文献计量分析[J].科学观察.2017,12(3):24-31.
8 Serrano J,Alvarez P,Cattin M,et al.The White Rabbit project[C].Proceedings of ICALEPCS TUC004.Kobe,2009.
9 黄璜.光纤双向时间传递时钟驯服技术研究[D].上海交通大学,2015.
10 李晓亚,朱勇,卢麟等.高精度光纤时频伺服传递实验研究[J].光学学报,2014,34(5):0506004-1-0506004-6.
11 杨君刚,王超,王凯.IRIG-B(DC)码在光纤高精度授时设备中的应用[J].光通信技术,2016,3:29-32.
12 王苏北,吴龟灵,邹卫文等.一种光纤双向时间比对时间码的设计与验证[J].光通信技术,2013,1:22-24.
13 刘志强,李德伟,李恩等.用于光网络时间同步的高精度时间间隔测量[J].光通信技术,2013,9:54-56.
14 陈智勇,韩蒂,庆毅等.面向时间应用的可驯服铷钟[J].宇航计测技术,2013,33(1):31-34.
15 樊多盛,施韶华,李孝辉.Kalman滤波的铷原子钟控制算法[J].宇航学报,2015,36(1):90-95.