能实现垂直缠绕攀爬的蛇形机器人
2020-06-16孙洪
孙 洪
(苏州市职业大学 电子信息工程学院,江苏 苏州 215104)
蛇形机器人在灾后救援、危险环境侦查、管道探测和疏通等许多领域具有广泛的应用前景。蛇形机器人是一种高冗余度移动机器人,具有多个确定机器人空间位置和姿态所需的自由度,由于超冗余的链式结构,其运动控制系统十分复杂,对于较为复杂的运动方式,实现起来非常困难。
目前,国内外的蛇形机器人能实现蜿蜒爬行、侧滑、翻滚、避障等二维平面运动,也已经具备抬头、爬台阶、翻越较低障碍等三维空间的运动能力。但能够实现爬杆、爬树等垂直缠绕攀爬的蛇形机器人,则仅见于美国卡内基梅隆大学的蛇形机器人研究中心[1-5]。
目前,国内外蛇形机器人样机的关节组合形式有两种:一种是所有关节同轴,这样的蛇形机器人只能在二维平面内运动,已经比较少见;另一种是相邻关节转轴以俯仰(pitch)—偏转(yaw)的方式正交连接,组成PY关节模块。卡内基梅隆大学实现的攀爬动作的蛇形机器人采用的即是PY关节结构,这种关节形式的蛇形机器人能够实现三维空间运动,但其灵活性及运动步态的多样性尚显不够。
研究和制作一种能实现垂直缠绕攀爬的蛇形机器人,使其既能在常规的地面或复杂废墟中行进,又能爬上高杆或大树,突破目前蛇形机器人活动空间依附于地面的限制。本研究主要设计了一种简单有效的关节结构,根据垂直缠绕攀爬的轨迹规划合理的运动步态,对各关节的驱动电机实现统一、协调的控制,制作出能实现垂直缠绕攀爬的蛇形机器人样机,并在运动控制和步态等方面跟PY样机进行比较。
1 关节设计
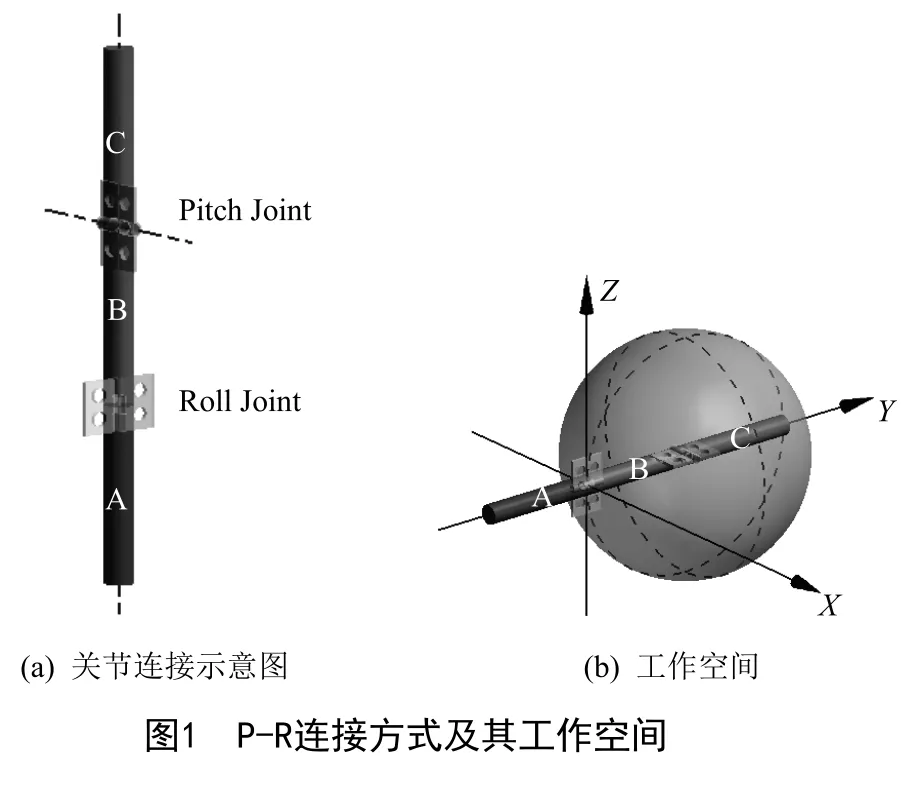
蛇形机器人要想充分实现其灵活性,应采用万向节的关节设计,此设计极大地增加了对各关节及机器人整体控制的难度。为了降低控制难度,并最大限度地保证蛇形机器人的灵活性,采用一种模块化的、具备三维灵活性的执行单元结构P_R(pitch_roll)关节[6],如图1所示。P_R关节具有跟万向节相似的工作空间,但其结构简单、便于控制,同时相对于采用传统的平行连接和正交连接,能够更为灵活地附着于攀爬对象外壁,并能较随意地调整步态和位姿,使得蛇形机器人与被缠绕物体之间能够密切贴合。
2 控制系统组成
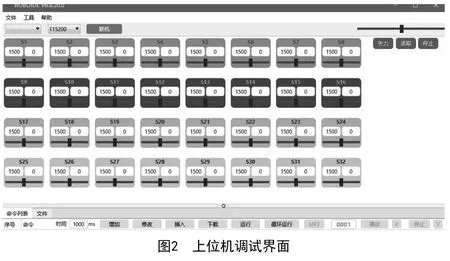
蛇形机器人的控制系统是以计算机为基础,其硬件系统采用二级结构协调级(上位机)和执行级(下位机)。上位机承担系统监控、动作管理和实时插补任务,由笔记本电脑及调试软件完成,调试界面如图2所示。
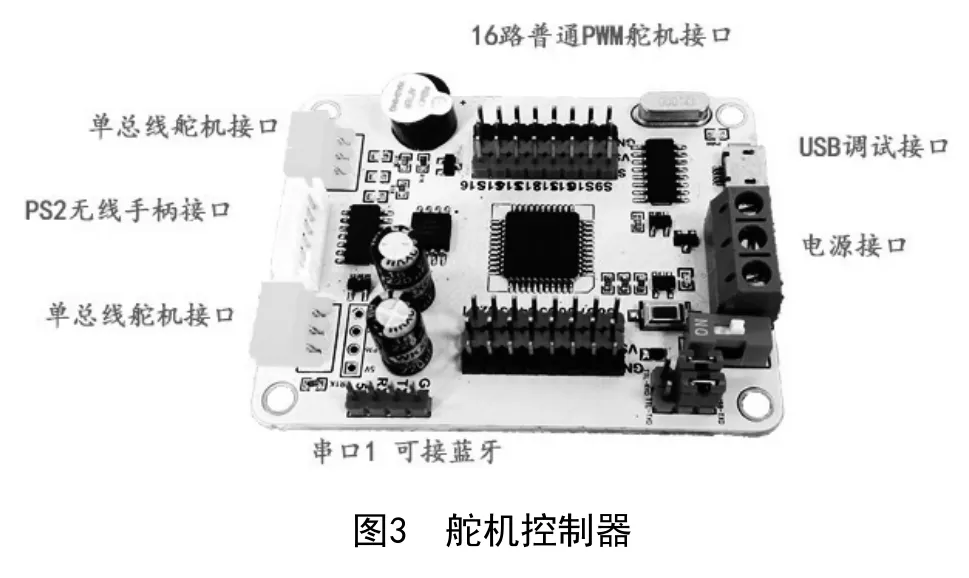
上位机运算结果作为舵机位置信号传送到下位机,下位机为舵机控制器,是各关节的伺服系统,其核心为STM32微处理器,板载8 M Flash存储空间,可以存储几万个动作组。舵机控制器如图3所示。
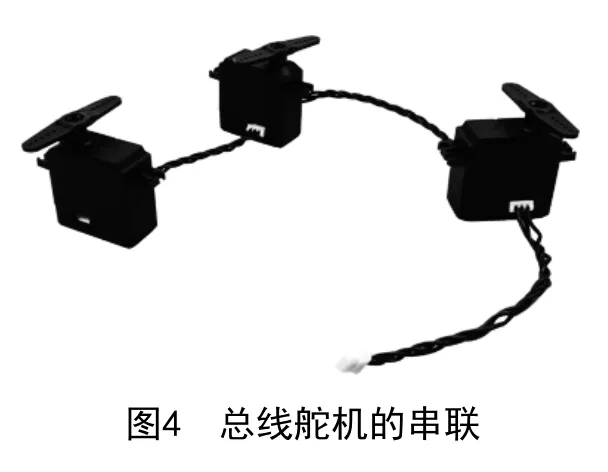
蛇形机器人由24个关节组成,各关节驱动采用串行总线舵机,如图4所示。该舵机通过串口指令控制,具有温度、电压、位置等参数反馈功能。使用总线舵机的好处在于可以将各关节舵机以串联的形式连接起来,极大地简化了机器人内部的布线。
3 步态设计
设计了蜿蜒前进、蜿蜒后退、侧滑、翻滚、水平钻管道、倾斜钻管道、水平缠绕前进、垂直缠绕攀爬等8种步态。各步态均采用舵机同时动作,以正弦量的角度变化为基础,实现角度的时序传递。
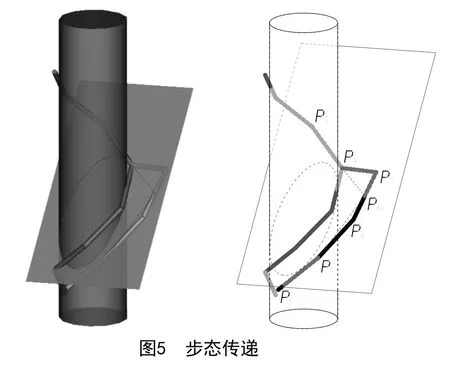
另外,为垂直缠绕攀爬设计了一种基于serpenoid曲线的蛇形机器人蠕动步态模型,该步态的基本特点是以空间三连杆组成的蠕动步态缠绕在圆柱体外侧,并依次将波形向前传递,如图5所示。
通过样机模拟运动采样和理论分析相结合的方法对缠绕攀爬的步态及受力进行分析,建立这一步态上各相邻连杆构成的空间四连杆间角度的关系,如图6所示。由此蛇形机器人即可根据圆柱体的直径和表面摩擦力决定各关节电机转过的角度,实现沿管线的螺旋式缠绕攀爬。
空间四连杆间角度关系为[7]:


4 样机及实验
为了便于比较和进行步态分析,制作了蛇形机器人PR样机和PY对照机,二者均使用相同的舵机作为关节驱动装置。
PR样机由30个关节(即15个P_R关节模块)组成。选择PVC作为管套以减轻质量,并在外面包裹一层橡胶以增大摩擦系数。装配完毕的样机如图7(a)所示。
PY对照机由24个转轴正交的俯仰(pitch)—偏转(yaw)关节组成,是所见最多的一种蛇形机器人的关节组成形式,如图7(b)所示。
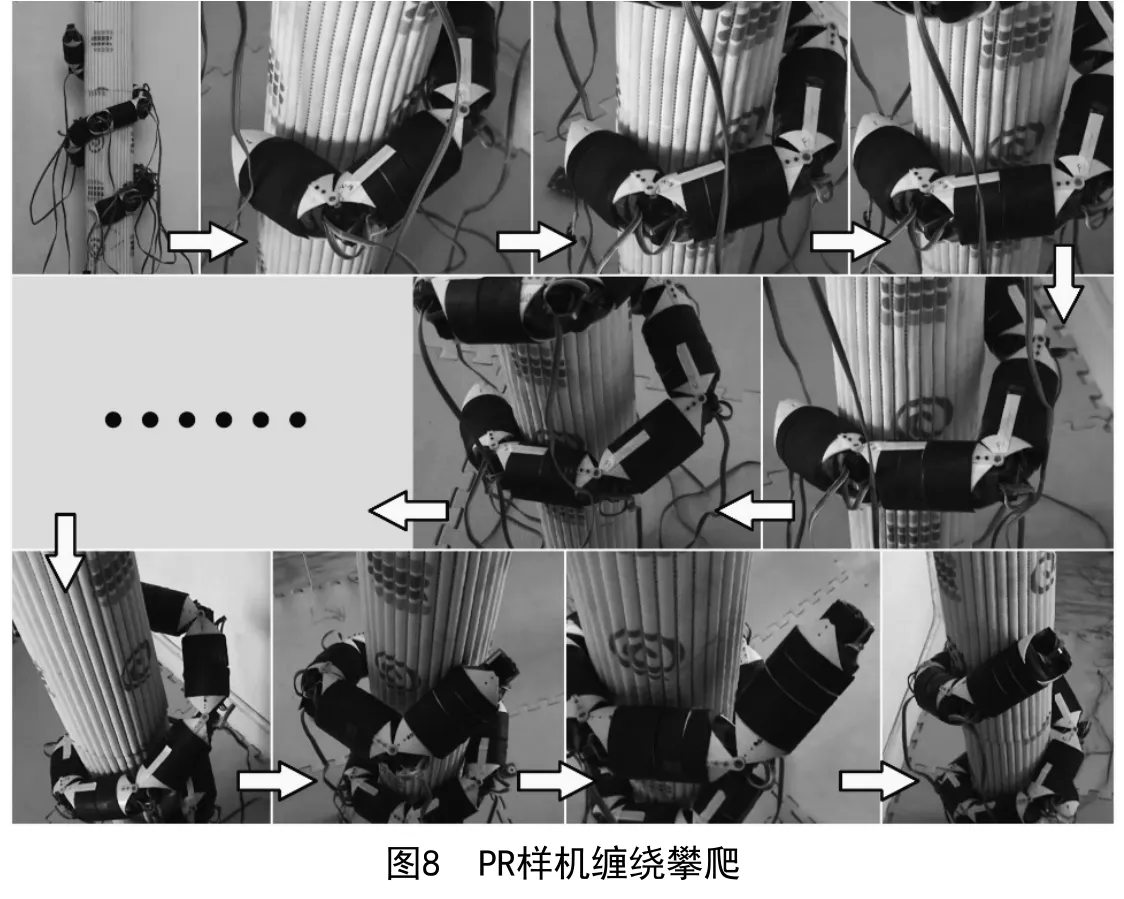
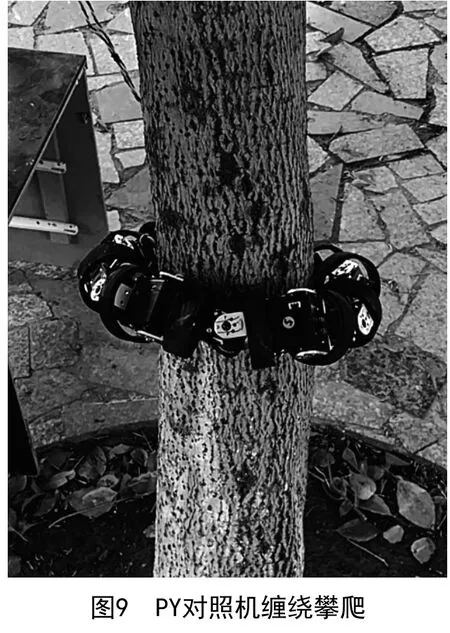
实验选择PVC管并在外面包裹不同材质的表皮作为攀爬物,具有不同摩擦系数的圆柱表面,能使蛇形机器人缠在其上保持静止而不下落的不同螺旋升角。PR样机以三连杆蠕动步态向上攀爬的过程如图8所示。PY对照机以翻滚步态在室外爬树的过程如图9所示。

将两种关节方式的蛇形机器人分别做平面和攀爬(爬树)运动,结果发现:
1) 在做平面运动时,PY对照机比PR样机控制更简单,关节间距更短。在进行爬行动作设计时,两种关节的变化规律都较易掌握。
2) 在做三维缠绕攀爬运动时,PR样机由于roll关节的存在,相邻P关节的夹角可以随意调节,使得蛇形机器人能够非常贴合地以螺旋状缠绕在被攀爬物体上,增大了二者的接触面积和摩擦力,便于做出不同的步态实现攀爬动作,如三连杆蠕动步态、翻滚攀爬等。而PY对照机则只能以近乎环形缠绕在树上,并以所有关节同时转动而产生的翻滚攀爬动作运动。
5 结论
1) 采用在三维攀爬过程中更有效的P_R关节组合,具有蜿蜒前进、蜿蜒后退、侧滑、翻滚、水平钻管道、倾斜钻管道、水平缠绕前进、垂直缠绕攀爬等8种步态,实现了在二维平面的多种爬行动作及三维空间中的垂直缠绕攀爬的蛇形机器人。
2) 作为特种机器人,其具备的三维攀爬能力在民用(管道、电杆检测等)方面有广阔的市场,而在军事方面配以相应的传感器,侦查、探测等也完全可以胜任。
3) 对于蛇形机器人运动控制相关的理论研究,可为同类型的多关节、多自由度、无基座的机器人提供有价值的参考。
