甘草挖掘机茎土分离装置运动学仿真分析
2020-06-15岳元满何存财吴劲锋范开欣杨小平万芳新
岳元满,何存财,吴劲锋,范开欣,杨小平,万芳新
(甘肃农业大学机电工程学院,甘肃 兰州 730070)
甘草系豆科多年生草本植物,根茎粗壮直径可达1~2 cm。甘草根可以调和各类药物,也可单独作为药物使用,具有清热、解毒、止咳、腕腹等功用[1-5]。此外,甘草对于沙漠区域有防风固沙的功能,也是旱区的重要植物[6]。近年来,人工种植甘草的产量和销量显著提高,截至2019年,甘肃省中草药种植面积约为460万亩,标准化种植面积达180万亩,其中甘草种植面积约占40%,均居全国第一位[7]
甘草生长周期一般为2-3年,在秋季9月下旬至10月初收获,3-4年为最佳挖掘期,此时甘草粗长、皮细密、色棕红、粉性足、断面黄白色、味甘甜。但这时甘草根深入土壤,加大了甘草挖掘的难度与工作强度。国内目前已研发出多款甘草挖掘机,并进行了相应的试验与理论研究。但这些设备在实际作业过程仍存在甘草与土块分离不彻底、损伤率高等问题。现有甘草挖掘机挖掘效果不佳,影响了甘草收获全程机械化的进程,制约了产业的进一步发展[8]。因此,研究一种实用、高效的茎土分离装置,对提高甘草收获全程机械化水平和甘草产业的发展具有重要的意义。
1 茎土分离装置结构设计
1.1 整机结构与工作原理
自主研制的甘草挖掘机主要由碎土机构、挖掘铲、振动机构、传送机构、收集系统、液压系统、悬挂系统等组成,甘草挖掘机结构简图如图1所示。
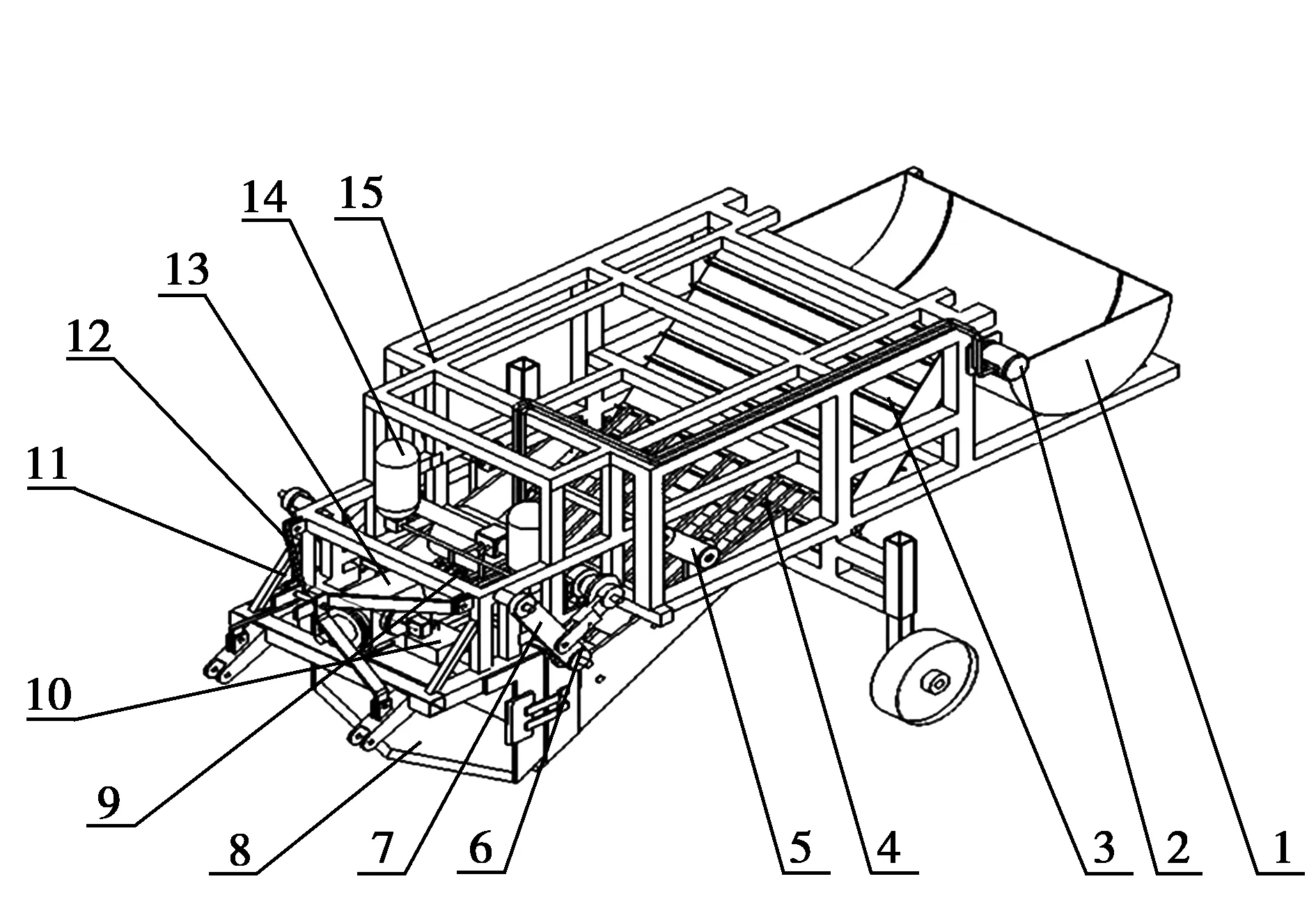
图1 甘草挖掘机结构简图1.收集箱;2.液压马达Ⅲ;3.传送带;4.振动器;5.连杆Ⅰ;6.摇杆;7.连杆Ⅱ;8.挖掘铲;9.液压阀;10.阀块;11.液压泵;12.悬挂系统;13.变速箱;14.蓄能罐;15.机架
工作时,拖拉机动力通过变速箱输出轴传送给液压泵,通过液压泵将机械能转化为流体动能,带动液压马达工作。液压马达驱动轴上的偏心轮旋转,偏心轮带动摇杆运动,摇杆带动连杆运动,振动器在连杆的运动激励下产生振动,实现对土块的破碎。挖掘铲将土壤与甘草铲起后通过振动器的振动作用向后输送,振动器尾部的甘草落入传送带,传送带将甘草传送至收集箱。甘草收集的速率取决于甘草挖掘机作业时的速度和茎土分离的效率。
1.2 茎土分离装置与工作原理
安装在甘草挖掘机中部的茎土分离装置是甘草挖掘机的核心组成部分,如图2所示。茎土分离装置主要由侧板、斗板、栅条、振动器等机构组成。作业时,摇杆运动带动振动器高频率小幅度振动,振动器的振动使茎土复合体中的土块从栅条上掉落。为了提高分离效率,在茎土分离装置的两个侧板上安装一组碎土辊,碎土辊与栅条的间隙由液压马达控制。碎土辊可对栅条上运动的茎土复合体进行挤压、揉搓等作用,使土块与甘草分离。为了提高分离效率与效果,降低根茎的损伤率,采用一组碎土辊并排安装。
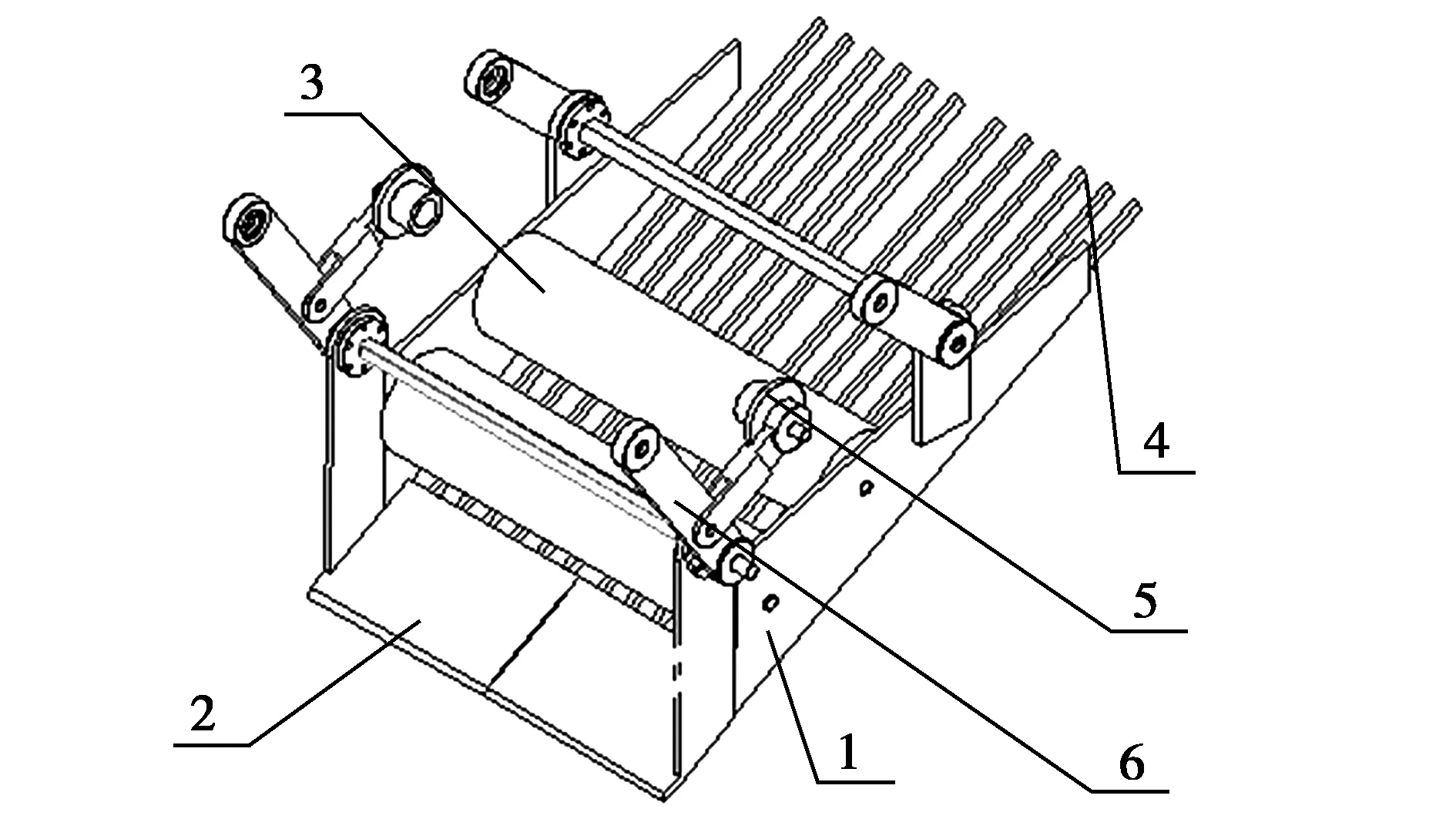
图2 茎土分离机构1.侧板;2.斗板;3.碎土辊;4.栅条;5.偏心轮;6.摇杆
2 茎土分离装置运动仿真分析
2.1 仿真参数设置
在ADAMS中进行运动学仿真,分析甘草挖掘机茎土分离装置中振动机构的运动规律[9-10]。首先在茎土分离装置振动机构上确定三个测量点,依次为后端点、前端点和质心,测量点的位置如图3所示。
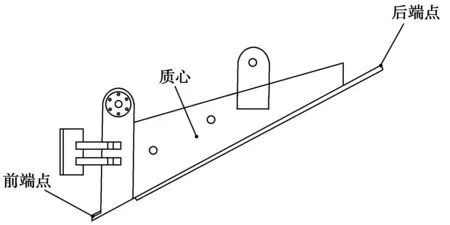
图3 振动机构测量点分布
为了方便观察茎土分离装置振动机构的运动特性,需要确定合适的模型仿真终止时间和数据点的多少[11]。设置仿真终止时间为0.5 s,求解步数为100,轴转速为300 r/min,筛面长度为2 030 mm,筛面倾角25°。
2.2 仿真结果分析
在ADAMS软件中进行运动仿真求解,通过ADAMS后处理模块对运动仿真结果进行处理生成运动曲线图,通过运动曲线图结合运动仿真结果在Matrix Laboratory软件中进行数据分析处理,得到参数见表1。
图4为茎土分离装置振动机构上三个测量点的合位移曲线。从图中可以看出,曲线A和曲线B、C的波峰与波谷相差半个运动周期,曲线B和曲线C的波峰与波谷基本相同。由图4分析计算得出最大振幅为40.30 mm,最小振幅为20.12 mm,振动机构质心的振幅为20.34 mm。振动幅度最大部分为茎土分离装置振动机构的最前端。由以上结论可知,茎土分离装置作业时,为了保证甘草茎土复合体顺利向甘草挖掘机后方移动,应适当减小合位移,此时也可以提高分离的效率。
表1 振动机构运动特性

测量点平均加速度/mm·s-2振动幅度/mm加速度/mm·s-2线速度/mm·s-1质心26 89020.343 047~43 3563.50~1 398.6前端点25 74439.292 311~41 5693.39~1 347.2后端点30 76120.134 568~51 6983.73~1 580.4
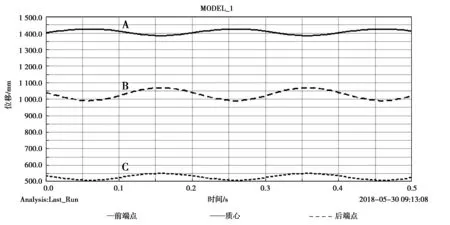
图4 振动机构合位移
图5为甘草挖掘机茎土分离装置振动机构上三个测量点在水平方向上的位移曲线。由图5可以看出,从振动机构前端点到后端点的位移不断增加,这可使振动机构后端的茎土复合体以较快的速度进入输送机构,以减轻茎土复合体在振动机构后端与输送机构交接处的堵塞,从而增加甘草的输送速率,提高甘草挖掘机的工作效率。
图6为甘草挖掘机茎土分离装置振动机构三个测量点的合速度变化曲线。由图6可以看出,前端点、后端点以及质心的合速度变化基本相同,从前端点到后端点速度依次增加,这就使得甘草在振动机构上以较快的速度通过,提高了甘草收获的效率。其中质心的速度变化范围为3.50~1 398.60 mm/s。
图7为甘草挖掘机茎土分离装置振动机构三个测量点的加速度变化曲线。由图7可以看出,质心的运动加速度范围为2 830.8~39 875.4 mm/s2,在甘草根土复合体不抛离振动筛的情况下,振动筛质心的加速度范围为3 047.9~43 356 mm/s2,质心的最小加速度低于最佳范围的下限。
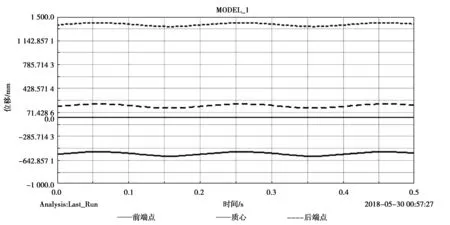
图5 振动机构水平方向位移

图6 振动机构合速度
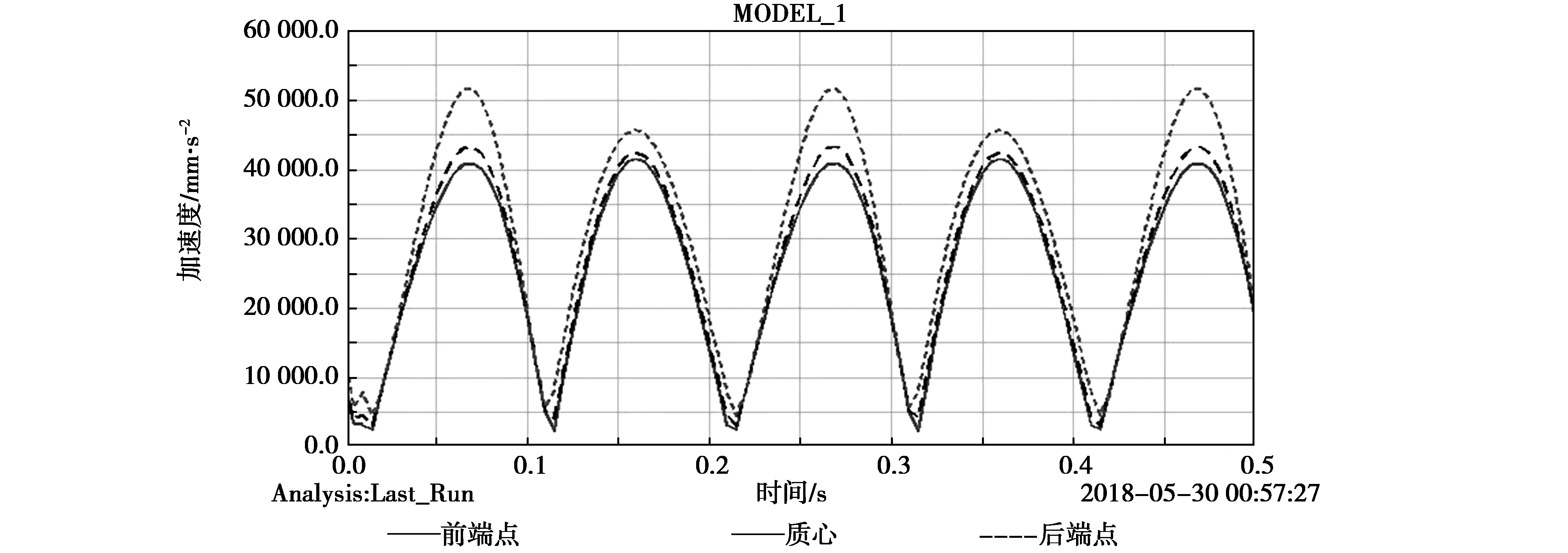
图7 振动机构加速度
图8为甘草挖掘机茎土分离装置振动机构质心在x方向和y方向速度的分量变化曲线。由图8可以看出,x方向速度分量与y方向速度分量的变化趋势及峰谷基本一致。x方向的速度变化范围为-950.10~887.01 mm/s);y方向的速度变化范围为-1 026.4~952.82 mm/s)。可以看出,质心在y方向的速度极值更大,这说明在工作过程中甘草根土复合体具有向上的趋势,更有助于茎土分离。

图8 振动机构质心x、y方向的速度分量
3 结论
(1)针对自主研制的甘草挖掘机,设计了一种振动式茎土分离装置。为了减轻小振幅时分离效果不佳的问题,在右侧板上安装了充气辊,以加强分离效果。
(2)利用ADAMS软件对茎土分离装置振动机构进行了运动学仿真,结果表明:茎土分离装置振动机构质心的振幅为20.34 mm,质心的速度范围为3.50~1 398.6 mm/s,质心的加速度范围为3 047~43 356 mm/s2。仿真结果表明该机构的设计及参数选择可有效实现甘草茎土分离,为进一步优化整机结构提供了理论依据。
