激光诱导击穿光谱的环形扫描探测与元素分布分析
2020-06-13兰云蛟郭金家郑荣儿
兰云蛟,卢 渊,郭 飞,郭金家,郑荣儿
中国海洋大学信息科学与工程学院物理系,山东 青岛 266100
引 言
激光诱导击穿光谱(LIBS)作为一种元素定性定量分析手段,具有无需样品预处理、实时在线、非接触、多元素同时探测等优点[1]。该技术的工作原理是将脉冲激光聚焦于目标物之上产生瞬态等离子体,通过识别等离子体特征谱线以实现元素的快速分析与检测[2]。LIBS由于技术原理简单、硬件结构通用易行,目前在众多领域获得应用,并取得了不同程度的成功[2-5]。作为一种主要应用,LIBS技术可通过逐点扫描探测完成样品表面元素成分分布分析[6-7]。该扫描过程主要是通过垂直或横向移动LIBS探测点位置,由点及面获得样品指定区域内的元素分布情况。根据文献调研情况,基于LIBS技术的环形扫描研究尚未见报道。因此,本工作搭建了一套LIBS环形扫描探测系统,用以获取元素分布情况,实现类似“雷达”的功能。
现阶段,激光雷达(LIDAR)已被广泛应用于地形[8]、大气[9-10]的扫描探测以及车载、星载等移动探测系统[11]。一般来说,激光雷达主要是通过激光返回时间或波长频移进行相应的测量与分析。设计研制的LIBS环形扫描是期望通过观测LIBS探测在接近目标物时的元素光谱信号提升,用以判断元素的高浓度区域,进而实现源头定位的目的。与常规的“横平竖直”式的点扫描探测比较,环形扫描可在大尺度范围内快速地实现目标寻源。此外,所搭建系统是通过旋转光学部件直接进行360 °扫描,而不是移动整个系统。虽然使用振镜也可实现扫描探测应用[12],但是扫描区域往往会受到振镜偏转角度的限制,难以实现全方位扫描。LIBS环形扫描简单结构,能够直接、有效地实现360°无死角的元素扫描探测,或可在污染寻源与矿藏勘察中获得应用,但必须经过一套标定方法进行结果校准,相应的校正过程将在此作详细介绍。
1 实验部分
图1为搭建的LIBS环形扫描系统原理图。系统采用Nd∶YAG固体激光器(montfort,M-NANO)基频输出1 064 nm脉冲激光,脉宽和重复频率分别为10 ns和10 Hz。实验中,单脉冲输出能量为23 mJ,能量浮动小于10%,可保证空气的连续击穿获得较为稳定的等离子体。所输出的1 064 nm脉冲激光束经全反镜反射沿竖直方向传输,透过二向色片后(Thorlabs,DMLP 900),经上方旋转台(大恒光电,GCM-1104M)中央位置直径为57 mm的圆形通孔,由安装在旋转台上的直角棱镜反射至焦距为50.8 mm的透镜处,激光经该透镜聚焦到样品并使其击穿形成等离子体。等离子体辐射所产生的信号光再由聚焦透镜收集准直,传输到直角棱镜处被向下反射并通过旋转台的中央通孔,进而被上述二向色镜反射400~900 nm波段的信号光,经由另一个50.8 mm焦距透镜收集耦合进入与光纤光谱仪(Avantes AvaSpec-ULS2048(L))连接的光纤,最终获得分辨率为0.7 nm的LIBS光谱。图中所示硬件系统在功能上可划分为固定部分和活动部分(阴影区域),其中,活动部分负责圆形旋转和环形扫描,固定部分则用于信号收集与探测。带通孔的旋转台作为两部分连接的关键器件,能够将激光与信号传输在通孔中心位置与旋转轴重合,实现在不移动激光和光谱仪的情况下进行LIBS环形扫描与探测。

图1 基于LIBS技术的环形扫描探测系统(a):结构原理图;(b):系统实物图Fig.1 The schematic diagram (a) and the picture (b) of LIBS circular scanning system
为评估所搭建系统的扫描探测能力,将海水注入雾化加湿器制造喷雾,模拟类似污染源的连续喷发场景,雾化加湿器相对所搭建系统的位置即为污染源头的具体方位。图2中所展示的是海水喷雾的LIBS探测典型结果,图中可以清晰地看到海水中的富含元素信号(如Na和Ca)。实验中,我们将“喷发源”按顺时针方向放置在与水平方向呈250°夹角、离旋转台转轴距离300 mm的位置处,通过人工转动环形探测系统的旋转台,使脉冲激光沿圆形轨迹连续聚焦击穿,并选择10 °作为扫描探测的间隔,在不同旋转半径下对整个圆形区域进行探测。通过比较寻找出所获得LIBS光谱信号强度最大值的位置,用以确定喷发源所在方位,即实验中置喷雾器的位置。

图2 空气和海水喷雾的典型LIBS探测光谱Fig.2 The typical LIBS detection spectra of air and seawater fog
2 结果与讨论
为获得更好的LIBS探测效果以实现灵敏的环形扫描,我们选取空气中氧气O (Ⅰ) 777 nm和氮气的N (Ⅰ) 746 nm两条谱线进行探测延时优化,具体结果如图3所示。当探测延时为5.5 μs时,所获得的氧气、氮气光谱信号的信背比达到最大值,如图3(a)所示;同时,在该探测延时下,所获得LIBS探测结果相对稳定,相应的信号波动小于15%。
我们选取钠元素信号作为追踪海水喷雾扩散的标志物,通过改变扫描半径实现LIBS探测以分析相应的喷雾分布。其中,扫描半径定义为以旋转轴为零点至探测点之间的距离,也就是说,“半径300 mm”下LIBS的探测点将恰好扫过“喷发源”位置。图4(a)为扫描半径分别为100,250和300 mm下的LIBS扫描结果,均以Na (Ⅰ) 589 nm谱线作为参考信号。所获得的结果与我们的预期保持一致,在扫描半径分别为300和250 mm的情况下,很容易在250°的方向获得最强的LIBS探测信号。但是,当扫描半径为100 mm时,很难追踪到喷发源的方位。同时,我们还发现LIBS扫描探测在160°~210°范围内获得显著增强,该结果与实际情况不符,可能为信号随机波动所造成的影响。因此,为减小该误差,我们选用空气中氮气N (Ⅰ) 746 nm原子线作为内标进行LIBS扫描信号强度的校正。图4(b)为使用N (Ⅰ) 746 nm内标后的扫描校正结果,可以看出,探测信号获得了较好的强度校正,整个分布图趋近于椭圆形,下半圆略显大(180°~360°)。
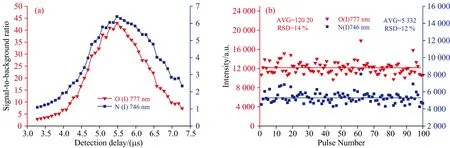
图3 空气中N,O元素探测结果信背比随探测延时的变化(a)和100个连续脉冲平均下的LIBS信号浮动(b)Fig.3 Signal-to-background ratio of LIBS signal as the function of detection delay (a) and the corresponding signal fluctuation abtained by averaging 100 individual measurements (b)
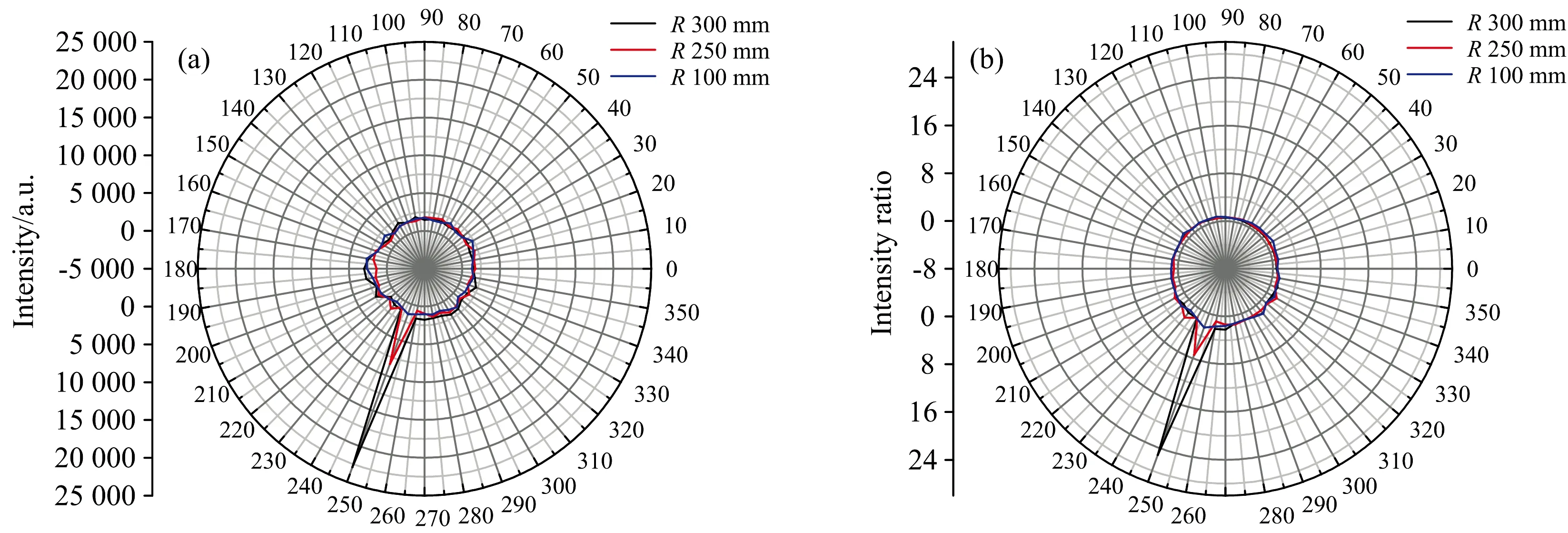
图4 不同扫描半径下钠元素的LIBS环形探测结果(a)和以氮元素为内标下的环形扫描校正结果(b)Fig.4 Intensity distribution of sodium element (a) and the intensity ratio distribution of Na/N (b). Each data point is obtained by averaging 10 individual measurements
图4中下半圆位置处(180°~360°)的强度偏差,极有可能是扫描过程中探测效率不一致所造成的结果。为获得扫描系统在不同位置的探测效率,我们以均匀的空气作为标准进行LIBS探测,典型结果如图5(a)所示(无海水喷雾)。从图中可以看出,0°~180°范围内的探测效果要明显优于180°~360°,探测最大值出现在90°位置,最小值则出现在230°~270°之间。由于所进行的探测效率评估是在均匀空气中进行的,因此,获得的分布结果在图示上理应更接近一个严格的圆形。造成如此现象的原因,应该是硬件安装或光路调节过程中所产生的误差。基于此,为提升探测结果的准确性,需要对每个探测位置处的探测效率进行相应的校正,具体流程如下:(1)将所有探测位置处获得的空气元素探测强度(N,H,O)分别利用强度最大值对每一探测点进行强度归一化处理,分别为IN,IH和IO;(2)将归一化后三种元素的光谱信号强度进行平均作为系统探测效率值,即(IN+IH+IO)/3;(3)考虑到三种元素在空气中实际为均匀分布,各元素应该浓度相同,即探测到的光谱强度应该近似,探测效率值的差异是由系统误差所造成的,故以探测效率值的倒数作为校正系数,即为探测效率系数Coe。最终,将所获得探测效率系数与环形扫描结果相乘得到校正后的分布数据,具体如图5(b)所示。结果表明,即使在100 mm的短扫描半径下,喷发源位置依然能够被准确地定位于250°位置处。同时,还可将高浓度区域锁定为220°~280°范围。因此,通过探测效率校正后,我们成功地获得了规则的圆形扫描结果,更使得LIBS环形扫描探测只在喷发源的具体方位有着明显的探测响应。
3 结 论
提出一种简单的结构使得LIBS能够完成类似“雷达”的元素环形扫描探测。实验评估结果表明,所搭建系统能够在360°全角度范围、三种不同扫描半径(100/250/300 mm)下,准确地锁定目标范围以及具体的方向角位置,在功能上具备了元素寻源的能力。但获得的探测结果必须经过必要的数据校正,具体包括了“信号浮动校正”和“探测效率校正”两方面,前者是探测过程中的误差校正,后者是系统硬件误差的校正。本工作作为LIBS技术的一种新尝试,期望可为“远程LIBS技术”发展提供一些帮助[13]。在此基础上,发展的硬件系统可望通过与望远镜对接升级完成大面积扫描覆盖,并通过电动旋转台的引入用以实现全程的自动扫描,在此基础上,配合纵向的竖直平移,将能够实现圆柱状的三维式扫描分析。在后期的工作中我们将针对一些特定的污染物质进行应用验证,真正实现污染物寻源的功能。此外,所搭建系统的机械结构也可应用于其他的光谱技术,例如拉曼光谱、荧光光谱等。
猜你喜欢
杂志排行

光谱学与光谱分析的其它文章
- Synthesis and Spectroscopic Characterizations on the Complexation of Three Different Metal Ions Ba(Ⅱ), Ni(Ⅱ),and Ce(Ⅲ) with Atenolol Drug Chelate
- An Estimation Study to Determine the Percentage of Hydroquinone Levels in situ Skin Lightening Creams Using GC-MS and HPLC Spectroscopic Instruments
- 光栅光谱衍射效率测量新技术的误差分析与校正方法研究
- 无人机高光谱的玉米冠层大斑病监测
- 叶表面偏振反射测量对冬小麦氮含量高光谱估算的提升
- 联苯菊酯分子的拉曼光谱研究