基于T-S模糊模型的高速动车组网络控制方法研究
2020-06-12徐滨全王元东宋程
徐滨全 王元东 宋程
摘 要:文章首先根据高速动车组网络控制系统的结构建立前向通道时延及反馈通道时延的多功能车辆总线网络控制系统。然后基于T-S模糊模型建立非线性网络控制系统模型,设计各子系统基于状态空间滚动优化的广义预测控制(Generalized Predictive Control,GPC)算法,但传统的GPC算法在线计算量大,不能保证高速动车组网络控制的实时性,故文章提出了一种改进的GPC算法,利用GPC算法与动态矩阵控制律的等价性直接求解最优控制,可极大地减少计算量。最后分别采用不考虑时延的基于T-S模糊模型GPC控制方法、基于T-S模糊模型GPC时延控制方法及基于T-S模糊模型改进的GPC时延控制方法进行实验仿真。实验结果表明:采用基于T-S模糊模型改进的GPC时延控制方法优于其它两种控制方法,该方法可精确地跟踪参考方波信号,也能较好地抑制时延对控制性能的影响且动车组制动开始时速度输出的滞后时间非常短、无剧烈的震荡输出,故保证了高速动车组网络控制的实时性。
关键词:高速动车组;T-S模糊模型;GPC算法;多功能车辆总线;时延
中图分类号:U285 文献标志码:A 文章编号:2095-2945(2020)17-0122-04
Abstract: In this paper, a multifunctional vehicle bus network control system with forward channel delay and feedback channel delay is established according to the structure of high-speed EMU network control system. Then, the nonlinear networked control system model is established based on the T-S fuzzy model, and the generalized predictive control (GPC) algorithm for each subsystem based on state space rolling optimization is designed. But the traditional GPC algorithm has a large amount of online calculation and can not guarantee the real-time performance of the networked control of high-speed EMU, so this paper proposes an improved GPC algorithm, which uses the equivalence of the GPC algorithm and the dynamic matrix control law to solve the optimal control directly, thereby can greatly reduce the amount of calculation. Finally, the experimental simulation is carried out by using the GPC control method based on T-S fuzzy model without considering time delay, the GPC time delay control method based on T-S fuzzy model and the improved GPC time delay control method based on T-S fuzzy model. The experimental results show that the improved GPC time delay control method based on T-S fuzzy model is better than the other two control methods. This method can not only accurately track the reference square wave signal, but also restrain the influence of time delay on the control performance. The lag time of speed output at the beginning of EMU braking is very short and there is no severe vibration output, so it ensures the real-time performance of high-speed EMU network control.
Keywords: high-speed EMU; T-S fuzzy model; GPC algorithm; multifunctional vehicle bus; time delay
1 概述
列車通信网络(TrainCommunicationNet,TCN)作为列车控制系统的关键部位,所有的控制信号都通过列车总线(Wire Train Bus,WTB)与多功能车辆总线(Multifunction Vehicle Bus,MVB)传送至相应的执行单元[1]。近年来,国内外已开始关注网络时延与列车通信网络控制算法的研究,因为列车控制系统具有非常复杂的非线性特性,故在控制与建模方面的研究难度非常高。由于T-S模糊模型可任意精度逼近非线性模型且其参数受影响的程度较小,故已被大规模地应用于非线性网络控制系统之中。本文搭建基于MVB的网络控制系统、考虑系统时延并采用T-S模糊模型对非线性系统建模,为各子线性系统设计广义预测控制器。最后,通过实验仿真来验证上述方法的正确性与有效性。
2 高速动车组网络控制系统
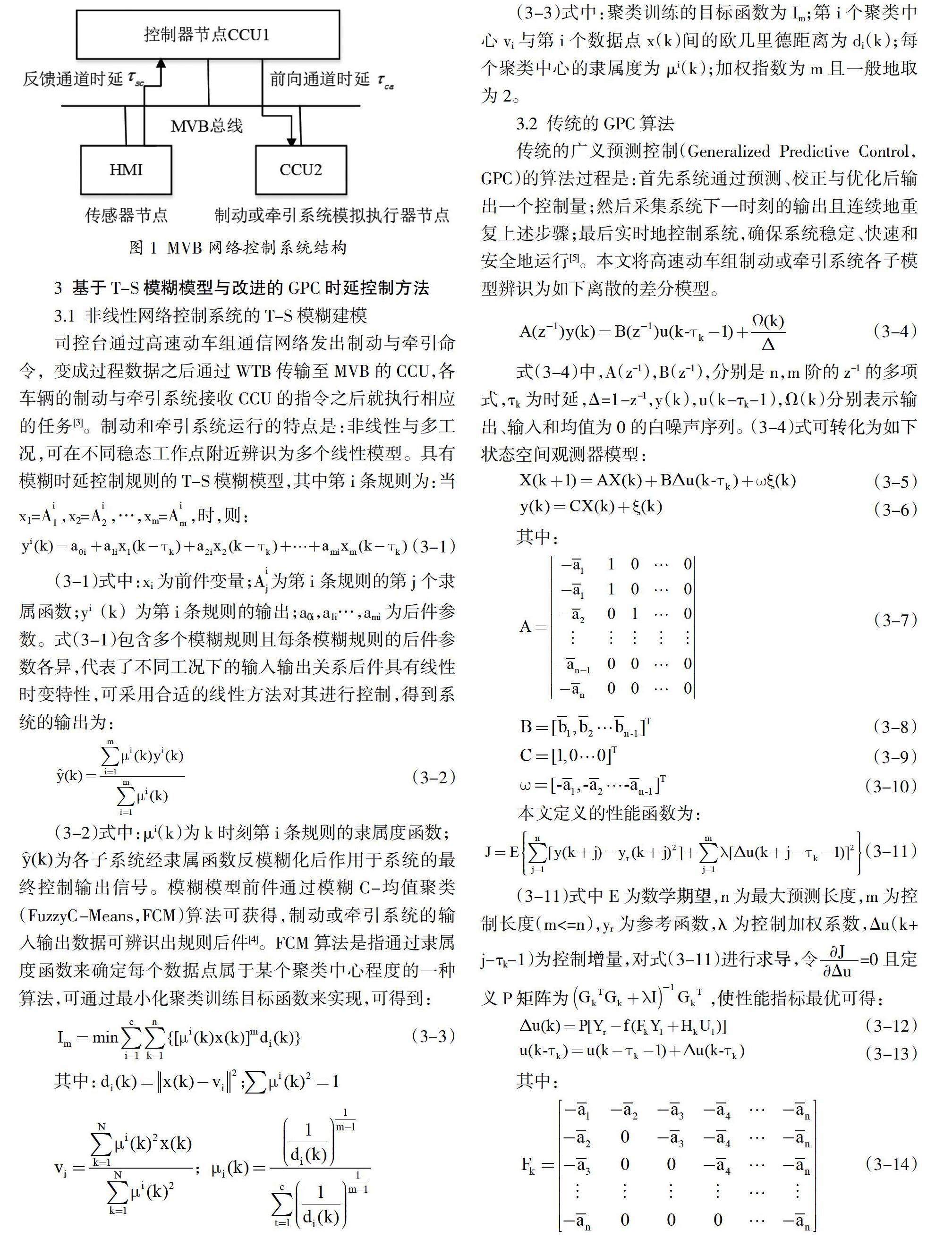
高速动车组通信网络控制系统包含一个显示屏(HumanMachin Interface,HMI)和两个中央控制单元(Central Control Unit,CCU)且都以过程数据在MVB上通信[2]。用CCU-1作为控制器节点对牵引、制动系统进行控制,通过组态软件把控制算法嵌入CCU-1之中,根据传感器节点检测的最新数据将控制量计算出来,再传输给执行器节点CCU-2并模拟制动或牵引的执行过程,之后把结果传输给传感器节点。系统可通过HMI传感器输出信号的测量结果并传输给CCU-1。故高速动车组网络控制系统的传输时延包括执行器节点与控制器节点之间的前向通道时延τca和控制器节点与传感器节点之间的反馈通道时延τsc,整个系统的网络时延为τ=τca+τsc。MVB网络控制系统结构如图1所示。
3 基于T-S模糊模型与改进的GPC时延控制方法
4 实验与结果分析
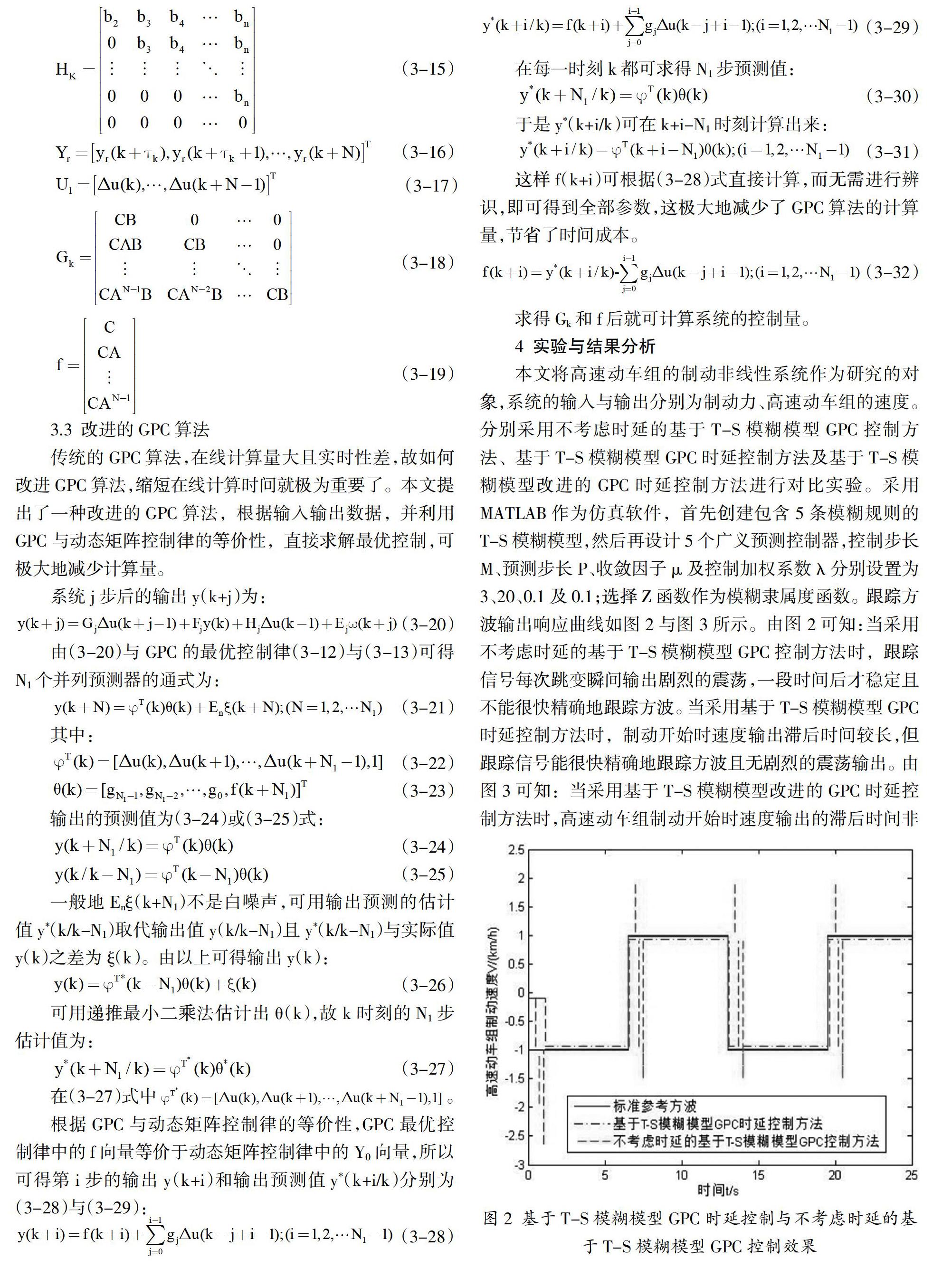
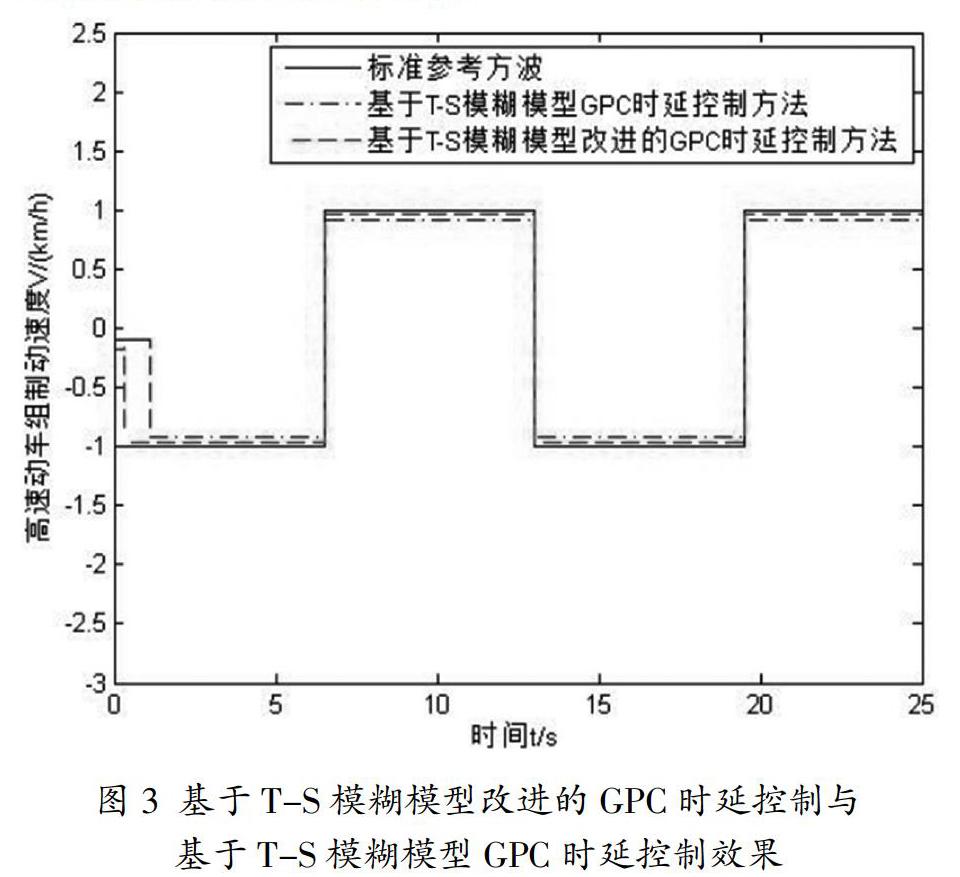
本文将高速动车组的制动非线性系统作为研究的对象,系统的输入与输出分别为制动力、高速动车组的速度。分别采用不考虑时延的基于T-S模糊模型GPC控制方法、基于T-S模糊模型GPC时延控制方法及基于T-S模糊模型改进的GPC时延控制方法进行对比实验。采用MATLAB作为仿真软件,首先创建包含5条模糊规则的T-S模糊模型,然后再设计5个广义预测控制器,控制步长M、预测步长P、收敛因子μ及控制加权系数λ分别设置为3、20、0.1及0.1;选择Z函数作为模糊隶属度函数。跟踪方波输出响应曲线如图2与图3所示。由图2可知:当采用不考虑时延的基于T-S模糊模型GPC控制方法时,跟踪信号每次跳变瞬间输出剧烈的震荡,一段时间后才稳定且不能很快精确地跟踪方波。当采用基于T-S模糊模型GPC时延控制方法时,制动开始时速度输出滞后时间较长,但跟踪信号能很快精确地跟踪方波且无剧烈的震荡输出。由图3可知:当采用基于T-S模糊模型改进的GPC时延控制方法时,高速动车组制动开始时速度输出的滞后时间非常短,跟踪信号也能较快精确地跟踪方波且不超调,无剧烈的震荡输出。综上,基于T-S模糊模型改进的GPC时延控制方法优于其它两种方法。
5 结束语
本文基于T-S模糊理论建立高速动车组网络控制模型,并对各线性子模型设计了广义预测控制器进行模糊加权控制,提出了一种改进的GPC算法。实验结果表明:基于T-S模糊模型改进的GPC时延控制方法可有效地控制时延、快速精确地跟踪参考信号且高速动车组制动开始时速度输出的滞后时间非常短、无剧烈的震荡输出,保障了高速动车组网络控制的实时性与鲁棒性。
参考文献:
[1]Yang T.Coupling onto radio frequency components enclosed within canonical structure[D].Adissertation for the Phd in the university of Michingan,2006.
[2]張晓晋,张顺广,黄枫.CRH3型动车组旅客信息系统与列车网络控制系统通信接口分析[J].铁道机车车辆,2014,34(4):47-51.
[3]LI shu jiang,WUYing,WANG Xiang dong,et al.VAVTerminal Unitcontrol Based on-S Model With the Generalized PredictiveControl[J].Applied Mechanics and Materials,2013,303/304/305/306:1234-1237.
[4]倪锐.无线网络的业务研究[D].中国科学技术大学,2011.
[5]Cohn.Determination of aperture parameters by electro-lvtic tank measurements[J].IEE,1980(32):1416-1421.
