利用编队位置保持设备提高机群自主导航能力
2020-06-12李中健
李中健
(陕西凌云电器集团有限公司 陕西省宝鸡市 721006)
1 概述
国营第765厂研制的编队位置保持设备,具有自主高精度相对定位和数据链功能,其主要用途是实现机群的编队飞行。在卫导不可用时,通过编队位置保持设备的数据链将飞机的惯导数据汇集到一架机上,再利用编队位置保持设备提供的飞机间相对位置数据,将所有飞机的惯导数据归一到一架飞机上,等同于一架飞机装有若干部惯导设备,进而对惯性导航参数进行加权滤波处理,达到提高惯性导航精度的目的,实现较高精度的长航时机群自主导航。
2 利用编队位置保持设备提高机群惯性导航设备定位精度的思路
惯性导航系统(INS)是飞机的主导航系统,而INS的定位误差随时间累积。如果没有辅助导航系统,INS长时间工作,其定位误差增长导致导航结果不可信。对于编队飞行的飞机,如果机上没有其他辅助导航设备,则可以利用编队位置保持设备提供的编队成员之间的相对定位信息与各成员惯导数据对惯导定位误差进行修正。
2.1 坐标转换
为了分析方便,空间直角坐标系采用地球地心固联参考系。
定义地球地心固联参考系(e系):用o-xeyeze表示,坐标系的原点在地球中心,与地球固连,oze轴和地球自转轴重合,oxe轴在赤道平面内指向格林威治子午线,oye轴在赤道平面内,oxe、oye、oze轴构成右手坐标系。
2.1.1 大地坐标系转空间直角坐标系
惯导输出的位置信息为纬度、经度、高度信息(L,λ,h),在空间直角坐标系的位置为(X,Y,Z)可以通过式(1)转换:

2.1.2 空间直角坐标系转大地坐标系

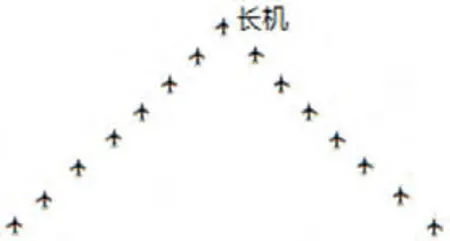
图1:17架协同编队飞机队形
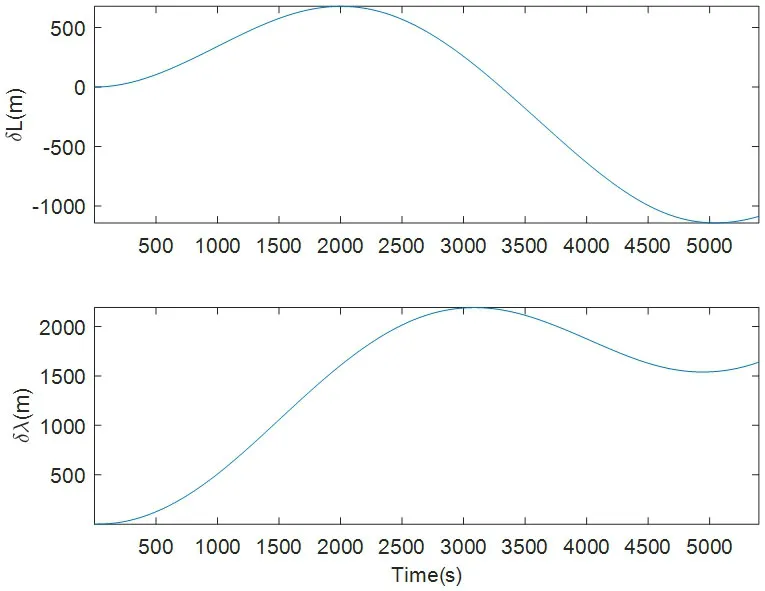
图2:长机惯导水平位置误差曲线

图3:误差方向一致时修正后的长机惯导水平误差曲线
式(2)中tanLi为前一次迭代值,第一次迭代令tanLi= tanL0,直至最后两次L值之差小于10-10,其中

表1:IMU参数设置
2.2 INS误差修正
假设协同编队飞行的长机惯导输出位置为(L长,λ长,h长),相应空间直角坐标系位置记为(X长,Y长,Z长)。
假设僚机i(i=1,2,3,…)惯导输出的位置为(L僚i,λ僚i,h僚i),相应空间直角坐标系位置记为(X僚i,Y僚i,Z僚i)。根据编队位置保持设备提供的数据信息得到僚机i在以长机为站心的坐标系内位置为(ΔXi,ΔYi,ΔZi)。
根据僚机i惯导输出位置信息,以及长机上的编队位置保持设备输出的僚机i相对长机的位置信息解算得到长机的位置如式(3)所示:


如果有N+1架飞机编队飞行,则同时刻长机惯导输出的位置计算如式(5)所示,将该位置信息转换到大地坐标系反馈回长机惯导,对长机惯导输出位置信息进行修正。

僚机也可以同样方法修正其惯导的导航数据。
3 仿真分析
3.1 编队队形
本仿真的编队队形为人字形,如图1所示,共17架飞机参与编队飞行。
3.2 参数设置

图4:误差方向相反时修正后的长机惯导水平误差曲线

图5:实际工作时修正后的长机惯导水平位置误差曲线
假设17架飞机上的惯导具有相同性能,惯导主要仿真参数设置如表1;编队成员近距离飞行时相对导航输出的位置误差为30m(1σ)。
3.3 飞行轨迹设计
惯导信息的误差特性主要表现为线性振荡的特点,其振荡周期约为87 min,本仿真时长为惯导一个震荡周期。
假设长机初始位置为(200,1000,5000),编队成员飞机都匀速向北飞行,飞行速度150m/s,飞行时间为90min。这种轨迹设计,编队成员间的相对位置保持不变,从而编队队形不变。若长机空间直角坐标系位置为(X长,Y长,Z长),僚机在长机的左后方和右后方。仿真时左后方僚机1位置为(X长+100,Y长-100,Z长-100)、左后方僚机2位置为(X长+200,Y长-200,Z长-200),左后方僚机3~8同样设置,则左后方僚机8位置为(X长+800,Y长-800,Z长-800);右后方僚机1位置为(X长-100,Y长-100,Z长-100)、右后方僚机2位置为(X长-200,Y长-200,Z长-200),右后方僚机3~8同样设置,则右后方僚机8位置为(X长-800,Y长-800,Z长-800)。编队成员飞机都同速同向飞行。
图2为长机惯导水平位置误差曲线,图中δL为纬度误差,δλ为经度误差,水平位置误差为1452m(CEP)。僚机惯导与长机惯导性能一致,水平位置误差也有一致性。
17架飞机执行协同编队飞行任务时,16架僚机的惯导位置信息与相对导航信息联合修正长机惯导,同时修正后的长机惯导位置信息与相对导航信息也联合修正僚机惯导。由于编队各成员惯导性能一致,下面所有情况只针对长机惯导误差的修正进行分析,修正有3种情况:
(1)极端情况下,假定所有僚机和长机的经度误差方向、纬度误差方向一致。此种情况下长机水平位置误差为1440m(CEP),如图3所示。可以看出,当编队各成员惯导误差方向一致时,利用编队的相对导航信息,对长机的惯导没有修正作用。
(2)另一种极端情况,假设17架飞机中有8架僚机与长机的经度误差方向、纬度误差方向一致,另外8架僚机与长机的经度误差方向、纬度误差方向完全相反。此种情况下,长机的水平位置误差为168m(CEP),正负误差基本抵消,有很好的修正效果,如图4所示。
(3)实际工作情况中,在编队成员数较多的情况下,(1)和(2)的极端情况几乎不可能出现,但也有一定的修正作用,所有编队成员惯导水平位置误差范围在(1)和(2)的极端情况之间。仿真的某种情况如图5所示,修正后长机的惯导水平位置误差为554m(CEP),这种情况下,利用编队的相对导航信息,可以起到修正作用。
4 结论
从仿真分析看,修正结果基本上为编队各成员惯导误差的算术平均。在协同编队成员数较多的情况下,利用编队相对导航信息与各成员惯导位置信息,可以延缓惯导位置误差的发散速度,修正的性能取决于编队成员数量和各成员惯导的误差特性。由于惯导间的误差特性不相关且误差趋向具有随机性,因此高精度相对定位功能可以延缓惯导位置误差的发散速度,实现较高精度的长航时机群自主导航。
