基于多数据源的高精度城市地表高程提取研究
2020-06-11中国城市科学研究会郑云梅吴洁张胜雷北京城建六建设集团有限公司王强北京治元景行科技有限公司赵永鹏
文|中国城市科学研究会 郑云梅 吴洁 张胜雷/北京城建六建设集团有限公司 王强/北京治元景行科技有限公司 赵永鹏
1 引言
近些年来,城市内涝及面源污染问题逐渐成为威胁城市安全运行的最主要问题。为实现城市规划合理控制地表径流的目的和要求,其中一项基本工作是获取基于径流系数的城市地表空间类型信息。城市地表空间类型包括下凹式绿地、河湖缓冲区等,因而要获取城市地表空间类型,需获取高精度城市数字高程模型(DEM)。目前免费获取DEM的途径为网上下载公开的SRTM 数据,但分辨率仅为30 米,精度低,不能满足城市地表空间类型识别的需要。其他高精度数字高程模型获取途径包括机载激光雷达数据、数字航空摄影测量和地形图等。
传统利用野外实测建立大比例尺地形图的方法往往成本高、效率低。利用地形图获取DEM,主要通过提取地形图中高程点,再通过内插的方法得到DEM。地形图比例尺决定了DEM 的精度。机载激光雷达(Light Detection And Ranging,LiDAR)是一种对地表空间和特征信息的直接定位新技术,能够快速获取地表高精度的数字表面模型(Digital Surface Model,DSM)数据进而获取高精度DEM。通过机载激光雷达数据提取DEM 的成本高,理论上精度最高。早在2011年时国家出台了《机载激光雷达数据处理技术规范》(CH/T 8023-2011)。学者们也做了大量Lidar 生产DEM 方面的研究,DEM 精度均较高。如李春晓、丁黎等(2016)利用某一城区0.3 个点/平方米机载雷达点云,经不规则三角网算法滤波,抽稀、自然邻域插值法,最终生成了高精度城区DEM;周琦、韩富圆等(2019年)为验证Lidar-DP 系统生产DEM 技术方法,按照2011年国家出台《机载激光雷达数据处理技术规范》(CH/T 8023-2011),生产了1∶2000 比例尺DEM。
航空摄影测量指的是在飞机上用航摄仪器对地面连续摄取像片,结合地面控制点测量、调绘和立体测绘等步骤,获取DEM、DOM 等图件的过程。航空摄影测量生产高精度DEM 由于其生产成本低、精度较高被广泛研究。2010年国家颁布了《低空数字航空摄影测量内业规范》(CH/Z 3003-2010)。学者们也做了大量研究发现其精度也较高,如胡荣明、张敏等(2011年)基于无人机低空影像生成1∶1000 比例尺正射影像时构建了DEM,利用检查点法计算不栅格尺寸的DEM 精度,发现2.5m 时DEM 的精度最高,高程中误差为0.0517。
通过文献检索发现,目前针对地形图、机载激光雷达、航空影像等多种数据源生产高精度DEM 的对比研究较少,大部分都利用一种数据制作DEM。因此本研究拟通过地形图、机载激光雷达、倾斜影像等多种数据源探索一种经济快捷的获取高精度DEM的途径,为城市地表空间类型信息获取过程中高精度DEM 的获取提供参考。
2 研究区及数据简介
2.1 研究区概况
研究区位于长江、京杭大运河交汇处,江苏省镇江市区西南部润州区北部,东与镇江市京口区毗邻,经纬度范 围 为:119 ° 23 ′ E~119 ° 27 ′ E,32°11′~32°14′N,东西长约4.75 公里,南北长约3.37公里,面积约为9.175平方公里,如图1所示。该区域地形起伏不大,高差从0 米至50 米,高差较小。该区地处中国经济最活跃的长三角核心区域,居民小区楼房众多,交通发达。气候方面属北亚热带季风气候带,具有明显的季风性、过渡性、变异性气候特点:春秋季短,为季风转换季节,气候温和;冬夏季长,夏季炎热多雨,冬季寒冷干燥。
2.2 数据源
本研究数据源主要包括:(1)从镇江市勘察测绘研究院购置的镇江主城区1∶500 比例尺地形图原始测绘高程点。(2)镇江市勘察测绘研究院采集的25 个外业RTK 像控点数据成果表。(3)从北京数字绿土科技有限公司购置的2017年3月镇江主城区沿内湖区域9.175 平方公里机载激光雷达数据、倾斜影像。激光雷达和倾斜影像数据采用自主独立设计集成的机载激光雷达系统Li-Eagle 进行作业,该系统集成了国际先进的激光雷达系统、计算机自动导航系统、高精度的惯性导航系统IMARFSNS 及高分辨率的佳能5D MarkII 数码相机,具备高效率、高精度、高可靠性的优势。动力三角翼的航线高度为320 米,获取的激光雷达点云密度约14-25 个点/平方米。倾斜影像的旁向重叠度为50%,航向重叠度为70%,地面分辨率为5cm。
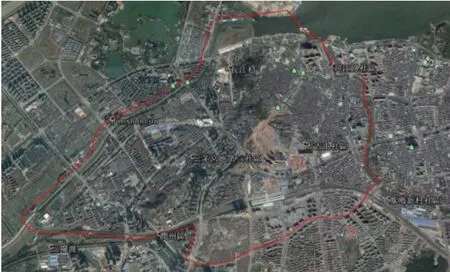
图1 研究区范围
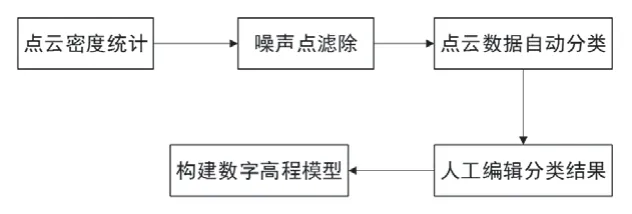
图2 点云数据生产DEM 流程图
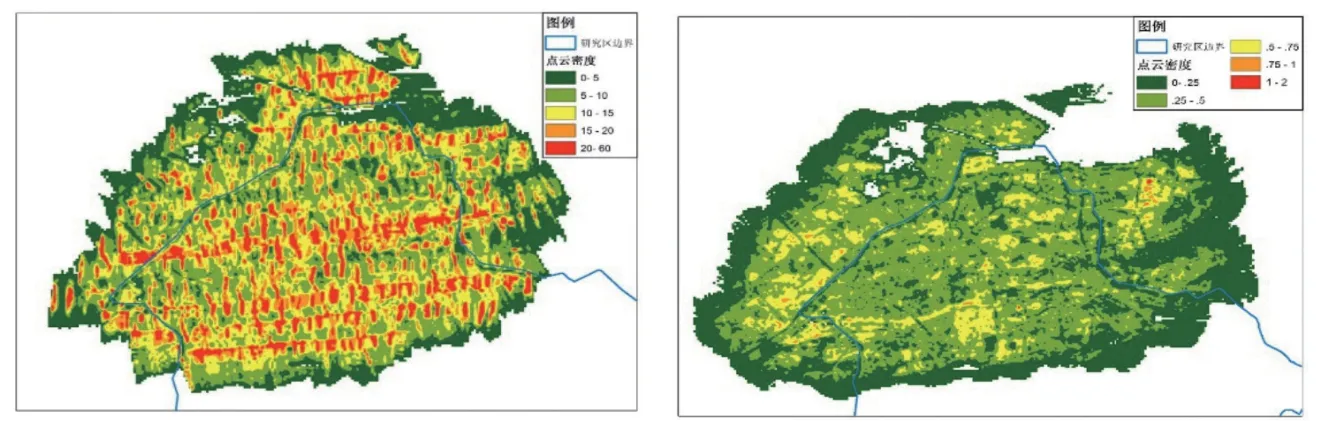
图3 镇江主城区激光雷达点云密度图(左)、倾斜影像点云密度图(右)
2.3 数据预处理
数据预处理主要包括前期预处理和坐标转换两步。机载激光雷达点云数据前期预处理主要包括两步,一是利用IE 航迹解算软件进行pos 解算。二是使用POFImport 工具、RiProcess 软件对点云进行解算。经过相邻航带间平面和高程匹配方面的检查,点云数据匹配精度满足1∶1000 精度要求;倾斜影像数据前期预处理主要包括两步,一是利用smart3d 软件构建s3c 模型,二是利用Pix4D软件生成点云数据。
机载激光雷达点云数据和倾斜影像数据获取的点云数据的坐标转换利用Terrasolid软件进行,通过选取25 个外业RTK 像控点数据成果表中5 个像控点建立了WGS84 椭球(UTM50N)坐标和CGCS2000 坐标之间的转换关系,并结合剩余20 个点进行坐标转换精度验证,经过比较,坐标转换参数精度满足相应规范要求。
3 DEM 提取方法
为高效获取高精度DEM,本研究中机载激光雷达点云数据生产DEM 流程按照《机载激光雷达数据处理技术规范》(CH/T 8023-2011)进行,倾斜影像获取的点云数据生产DEM 流程亦按照该技术规范中点云滤波分类技术流程进行。由于本研究中地形图比例尺为1∶500,精度超出了机载激光雷达点云和倾斜影像数据获取的点云数据,因此采用该数据原始测绘高程点对上面两种方法生产的DEM 精度进行分析。
4 DEM 提取过程
本研究DEM 提取流程,包括点云密度统计、噪声点过滤、自动分类、人工编辑、DEM 生成等5 步,主要利用Envi Lidar 软件进行提取,提取流程如图2所示。具体提取过程如下:
4.1 点云密度检查
在Terrasolid 软件中打开任一航带点云数据,使用Terrasolid 软件点云统计密度工具进行点密度统计。受测区地形起伏、航线覆盖范围内河流、池塘等的影响,激光雷达点云密度约14-25 个点/平方米(如图3所示),根据《CHT 8023-2011 机载激光雷达数据处理技术规范》,满足1∶1000 比例尺精度要求。倾斜影像点云密度在0.25 个点/平方米以上(如图3所示)。
4.2 噪声点过滤
噪声点过滤主要是提取明显低于地面的点或点群、明显高于地表目标的点或点群,以及移动的地物点,即低点、空中点以及移动地物点。利用ENVI Lidar 软件中高度设置功能,过滤噪声点云。
4.3 点云数据分类与信息提取
由于本研究目标为提取1:1000 高精度DEM,因此根据相关规范,将DEM 数据输出网格大小设置为1 米,系统自动计算生成DEM、树木、房屋等信息;其参数设置及处理方法功能如图4、5 所示:

图4 DEM 自动提取参数设置图
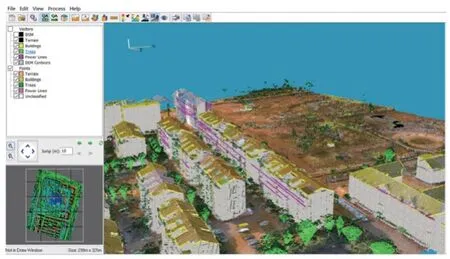
图5 点云数据分类与信息提取图

图6 点云数据结果编辑图

图7 镇江主城区激光雷达点云数据生产的DEM 数据

图8 镇江主城区机载倾斜影像点云生产的DEM 数据
4.4 DEM 数据编辑及保存
人工交互编辑的目的是剔除自动分类没有滤掉的部分粗差和未分类正确的激光点。利用Envi lidar 的QA 模式只需按一下特定的数据点,便可以修改其属性。可用平滑,修改误分类或调整个别结果的方法来对DEM进行修正,包括建筑物、树木的形状、高度等,实现DEM 的精细化处理,其处理界面如图6所示。
最终利用激光雷达点云数据、倾斜影像点云制作得到的DEM 如图7、8 所示。

表1 基于1∶500 比例尺地形图原始高程点的DEM 精度统计表

表2 基于像控点的DEM 精度统计表
5 精度评价
5.1 基于1∶500 比例尺地形图原始高程点数据精度评价
从1∶500 地形图原始测绘高程点中随机筛选了位于道路上的500 个点,对倾斜影像与机载激光雷达点云数据生产的DEM 进行精度评价,结果如表1所示。可知,倾斜影像数据生产的DEM 最大高差为0.293 米,激光雷达点云数据生产的DEM 最大高差为0.141 米。可见激光雷达点云数据生产的DEM 精度明显较高。
5.2 基于像控点的精度评价
基于镇江勘察测绘研究院采集的像控点对倾斜影像与机载激光雷达点云数据生产的DEM 进行精度评价,结果如表2所示。可知,倾斜影像数据生产的DEM 最大高差为0.372米,激光雷达点云数据生产的DEM 最大高差为0.093 米。
由于地形图获取时间与机载激光雷达点云、倾斜影像获取时间不一致,精度评价结果略有差异,但精度基本一致,机载激光雷达点云获取的DEM 精度较高,最大高差为0.093m,较符合城市地表空间识别的需求。
6 获取成本和工作量分析
1∶1000DEM 获取来源主要包括激光雷达点云数据、倾斜影像获取,或直接购置1∶1000DEM 成果。从数据源获取成本角度来说,根据表3三方询价结果,可知镇江10 平方公里激光雷达数据采集总费用在15万元以上,航空影像成本较低,为5~6 万元。根据《测绘工程产品价格》,1∶1000DEM产品价格为770.34 元/幅(研究区地形较为平坦,因此按照最容易级别价格进行计算),每幅面积为0.2 平方公里,因此研究区1∶1000 比例尺DEM 市场价为3.8517万元,可见激光雷达数据采集费用明显高于1∶1000 比例尺DEM 购置费用。
从数据源制作角度来说,对于类似于镇江主城区这种较为平坦的区域来说,由于1∶1000DEM 制作需获取大量的高精度实测点,需投入大量的工作人员和时间才能获取。但对于处于山地、丘陵地区的城市来说,随着地形起伏程度的不断加大,地形图实测点信息的获取难度增加,特别对于喀斯特地貌等情况,更是难上加难,已不是工作量的事情。因此对于这类地区来说,通过机载激光雷达数据,无疑是获取高精度DEM 的最佳方式。
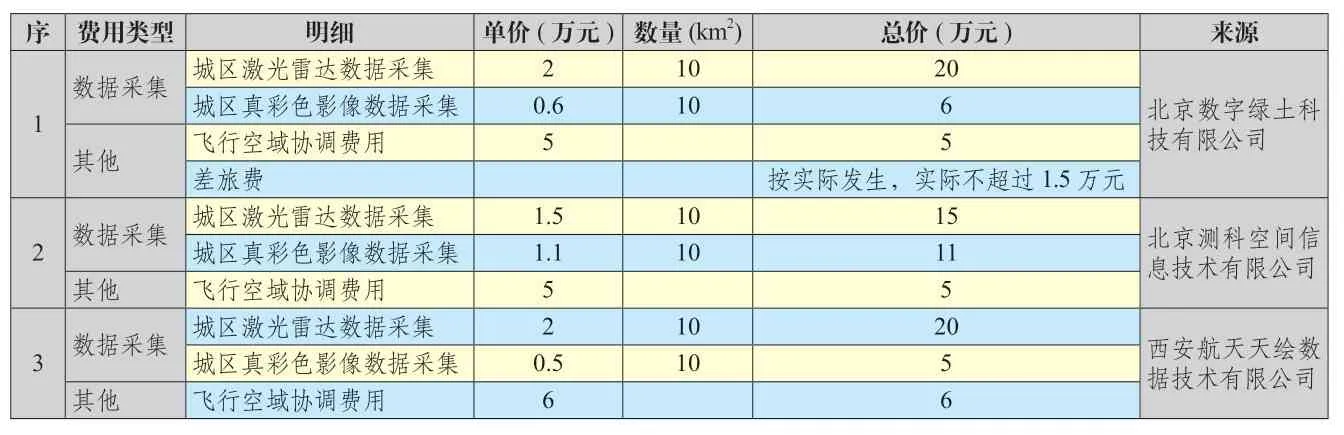
表3 镇江主城区激光雷达和真彩色数据采集价格统计表
7 结论
本研究通过镇江主城区润州北部约10平方公里机载激光雷达点云数据、倾斜影像生产1∶1000 比例尺DOM 影像过程中生成的点云数据,按照点云数据处理规范生产了高精度DEM 数据。通过精度比较和验证,结果表明机载激光雷达点云数据精度较高。结合1∶1000 比例尺DEM 市场价,机载激光雷达点云数据、倾斜影像数据获取成本进行分析。可知机载激光雷达点云数据成本高,其生产的DEM 精度最高。倾斜影像数据成本次之,精度略低。通过直接购置1:1000 比例尺DEM 成本最低,精度也较高,但本结论仅适用于地形较为平坦的区域,对于城市地形起伏较大的区域,还需进一步研究。