可持续性涡旋的产生与测量
2020-06-11郭瑞雪王鹏程周司维林漫铃
郭瑞雪,王鹏程,周司维,林漫铃,陈 倩
(华南师范大学 物理与电信工程学院,广东 广州 510006)
在日常生活中,涡旋移动是流体运动常见形式之一,因此在流体力学中关于涡旋运动的研究是重要部分. 在近代流体力学史上,欧拉的理想流体运动基本方程是建立在忽略流体黏性的基础上,1857年赫姆霍兹在欧拉提出的微团绕着某一轴以同样的角速度旋转的背景下对流体涡旋作出开创性的研究,采用类似于电流的电磁相互作用的方法来研究流体运动,首次解决了流体涡旋中流体的不可压缩、无黏性流体的问题[1]. 开尔文受到了赫姆霍兹的启发,更加深入地对流体涡旋进行了研究,提出了开尔文定理. Bjerkens将赫姆霍兹和开尔文的理论推广到大气和海洋运动中. 1911年冯卡门发现卡门涡街现象. 目前流体涡旋仍然是当代流体力学研究的热点. 本文借助粒子图像测速(Particle image velocimetry,PIV)技术将涡旋可视化,利用单片机实现了对涡旋速度的控制. 利用双激光设备追踪直径为30 μm的示踪粒子,在设备上显示出示踪粒子的运动轨迹、速度、涡度等.
1 实验原理
1.1 电机转动产生涡旋的原理
电机的转动产生涡旋可近似为兰金涡的模型,电机是半径为R的有限长的圆柱形,流体像刚体一样绕其轴线转动,角速度为ω[2]. 电机转动时使得附近的流体受到与表面相切的切向力,同时体积力不能表示为势函数的梯度,由于流体受到惯性影响,并且由于水缸有边界,因此产生了涡量源,形成涡旋[3],涡旋模型图如图1所示.

图1 涡旋模型图
1.2 涡旋的理论分析结果
根据毕奥-萨伐尔定理,可以由已知漩涡场确定速度场,其中由涡丝引起的速度称为旋涡诱导速度场,如图2可得,微元涡丝ds在P点诱导速度为
其中r为旋涡强度.
当为无限长直涡丝时,
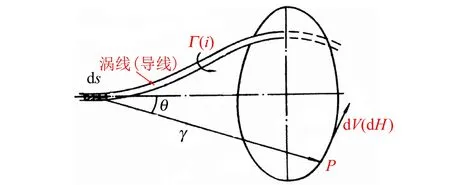
图2 诱导速度分析图
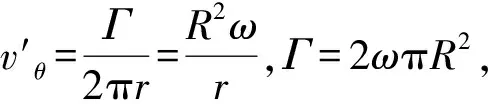
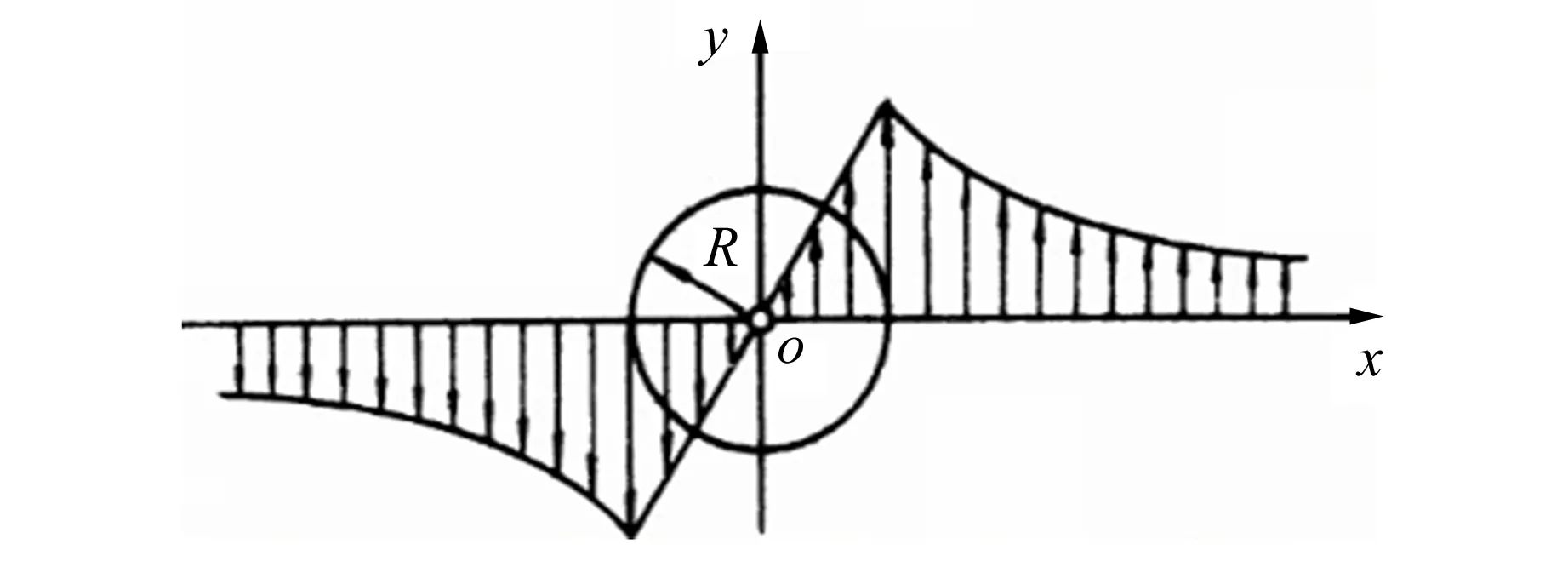
图3 速度分布图
由于涡度是矢量,其定义为速度的旋度,用ω表示,ω=rotV=×V,根据速度图可得涡度分布如图4所示.
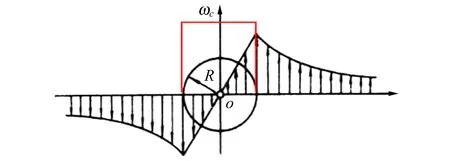
图4 涡度分布图
1.3 PIV技术原理
PIV技术是除向流场散布示踪粒子外,所有测量装置(见图5)并不介入流场,并利用CCD高速相机进行拍摄,通过分析采集图像得出流场信息的技术[4]. PIV法测速是通过测量示踪粒子在已知很短时间间隔内的位移来间接地测量流场的瞬态速度分布[5]. 由于实验电机转速快,很难测量实时数据,因此采用PIV技术. PIV技术对示踪粒子有要求,示踪粒子需要有足够高的流动跟随性,示踪粒子的运动才能够真实地反映流场的运动状态. 因此示踪粒子在PIV测速法中非常重要. 在PIV测速技术中,高质量的示踪粒子要求为:1)比重要尽可能与实验流体相一致;2)足够小的尺度;3)形状要尽可能圆且大小分布尽可能均匀;4)有足够高的光散射效率. 实验采用的玻璃砂符合示踪粒子的要求[6-7].
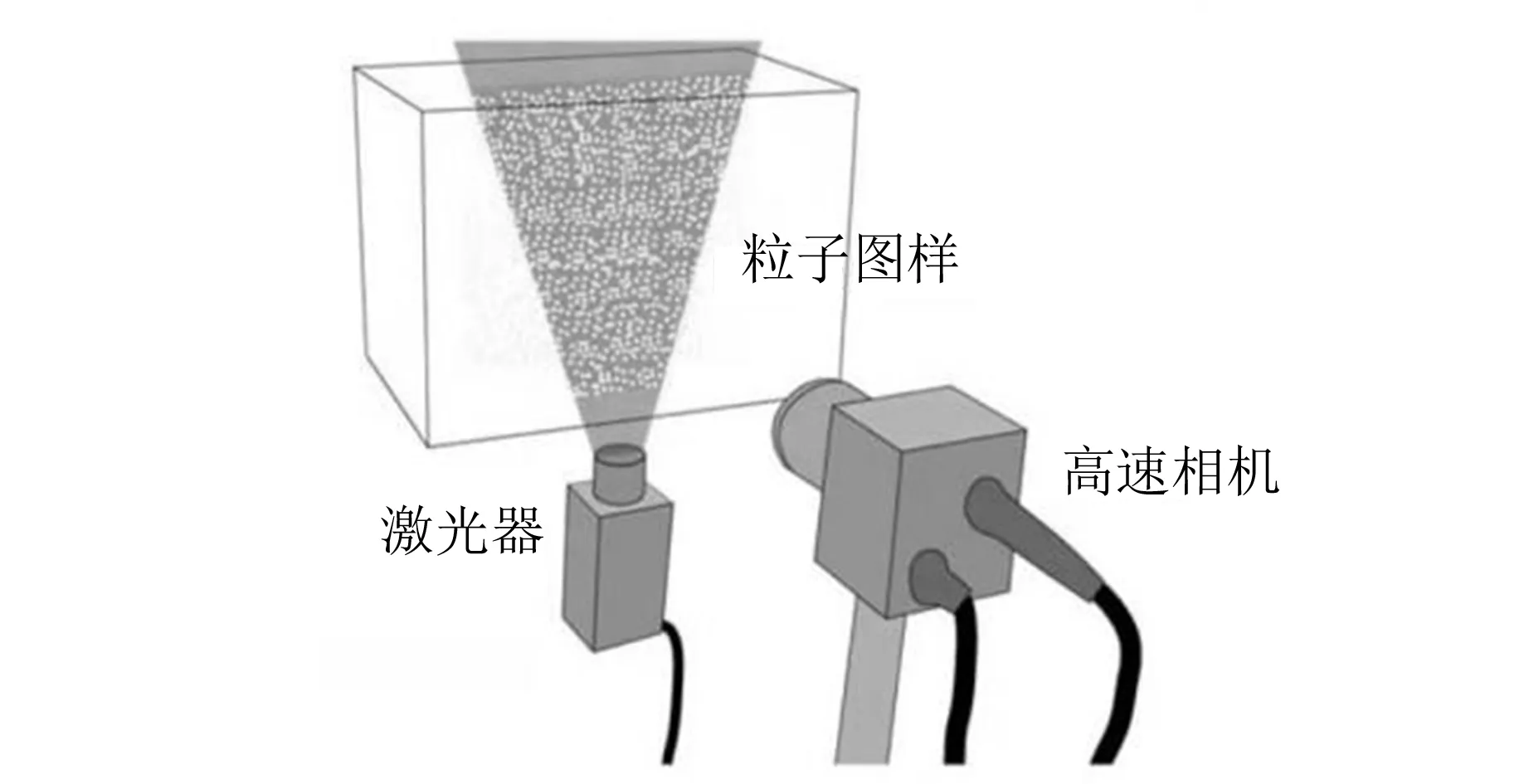
图5 PIV装置图
1.4 直流电机控制原理
直流电机是根据通电导体在磁场中会受力的原理工作的,只要控制电压就比较容易控制速度,直流电机占空比示意图见图6. 通过电力电子线路(各种晶体管、MOS管等)控制电机的供电电压频繁导通,形成脉冲宽度调制(Pulse width modulation,PWM)以控制电机的转速,假设PWM的频率不变,只改变PWM的占空比,当PWM的占空比减小时,则输出电压的有效值就减小,即电机转速减慢,反之就增快. 实验采用的直流电机占空比为0%~100%,通过按键控制占空比的比值可以调节电机转速.

图6 直流电机占空比示意图
2 实验方法
2.1 实验器材
发生装置所用器材:矩形玻璃水箱0.6 m×0.4 m×0.4 m、壁厚0.8 cm(1个),水下电机马达(1个),扇叶(3个,半径分别为3 cm,4 cm,5 cm),STC89C52单片机开发板(1个).
测量装置所用器材:波长为650 nm、功率为200 mW的激光源(2个),10 cm×10 cm可调节升降平台(2个),直径为45 μm的玻璃砂(若干),CCD摄像机(1台),直线导轨滑轨(2条).
2.2 实验装置
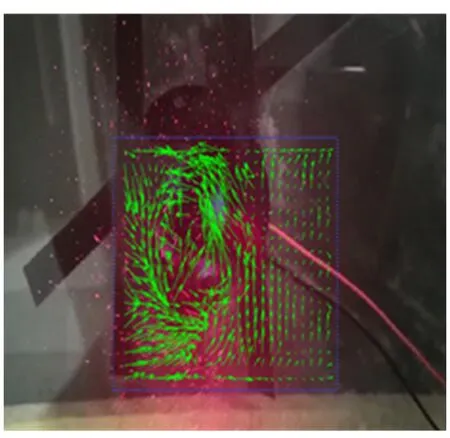
在玻璃水箱底部距离长边约12 cm处平行于长边放置可移动导轨,在导轨上固定电机马达. 电机通过杜邦线与水箱外的单片机相连[8]. 水箱上方平行于水下导轨放置导轨,在导轨上固定CCD相机,调节使CCD相机垂直于扇叶正上方. CCD相机与笔记本电脑相连,由笔记本电脑控制CCD相机拍摄[9-10]. 2个线激光器置于可调节高度的水平升降台上,2个激光器等高且照射面与水面平齐. 实验装置示意图如图7所示.
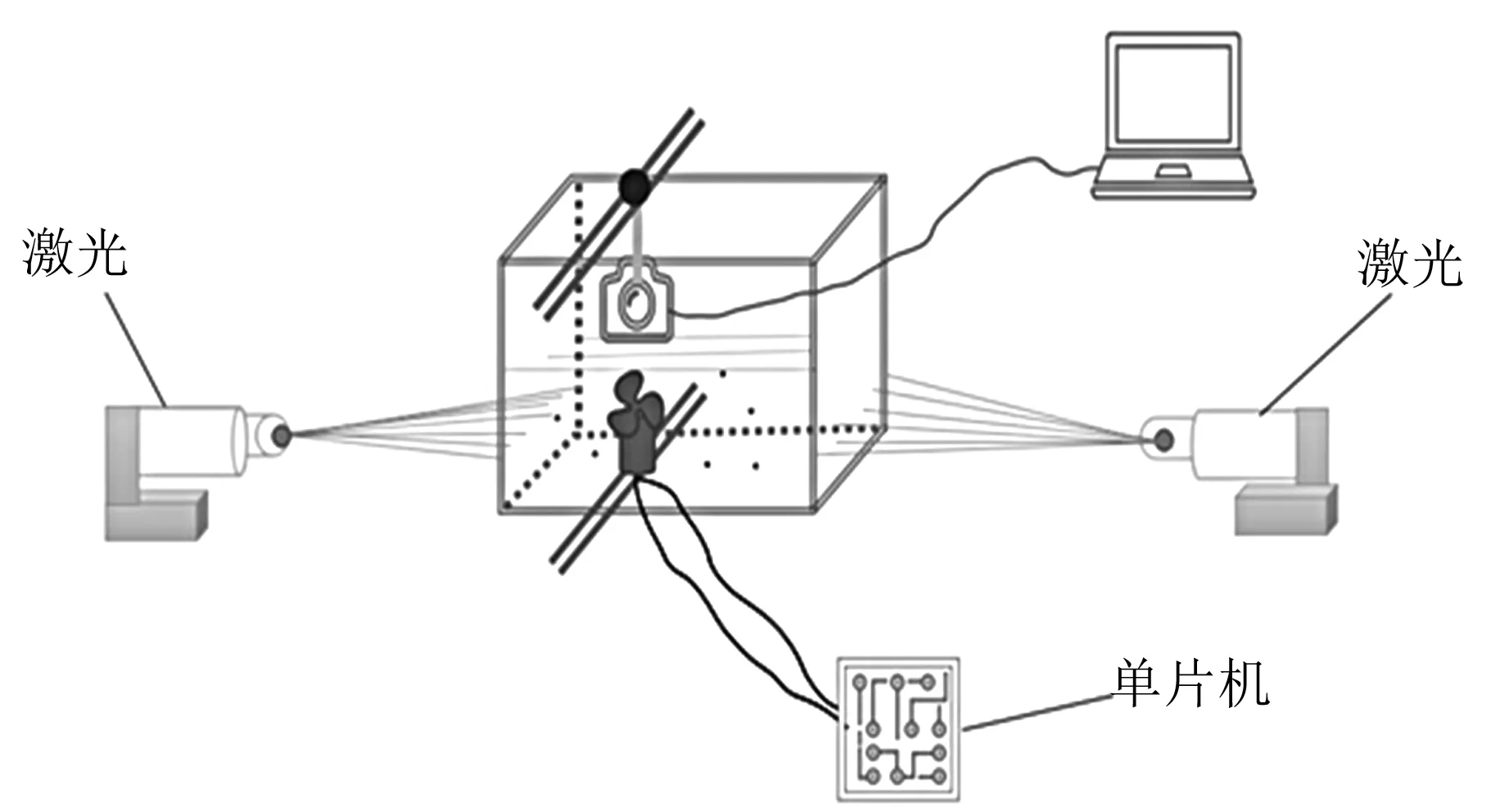
图7 实验装置图
2.3 实验步骤
1)调节水面高度:向水缸中注入清水,为了使涡旋结构清晰、便于数据提取,调节水面高度为14.5 cm.
2)加入适量示踪粒子:向水中加入直径约为45 μm的玻璃砂作为示踪粒子.
3)调节电机速度:实验表明选取半径为4 cm的扇叶,PWM占空比为88%时产生的涡旋效果明显且较为稳定. 故打开电机电源,用单片机调节电机至占空比为88%下的转速.
4)调节激光器的位置:调节2个激光器水平,同时调整升降平台使激光的高度与水面平齐.
5)获取实验数据:CCD相机拍下示踪粒子分布图的图像序列,用PIV Lab分析涡旋的速度和涡度分布,得到速度和涡度曲线图[11].
3 实验结果与分析
3.1 处理环境和实验条件
3.1.1 处理环境
1)Matlab版本:2017b.
2)PIV处理软件:Thielicke, W. & Stamhuis, E.J. (2014): PIVlab - Time-Resolved Digital Particle Image Velocimetry Tool for Matlab (version: 2.02).
3)电机工作时,电压为12 V.
3.1.2 实验条件
实验发现,当扇叶半径为4 cm,占空比为88%时,涡旋处理效果最为显著并且实验数据更为稳定可靠. 于是设置扇叶半径为3 cm,4 cm,5 cm进行实验,并选取效果最好的扇叶半径进行占空比为80%,88%,96%的对比实验[12].
3.2 实验结果处理分析
以扇叶半径为4 cm,占空比88%为例进行数据分析.
1)采集到极短时间间隔内2帧示踪粒子分布图[13],如图8所示.
(a) 前一帧
(b)后一帧图8 示踪粒子分布图
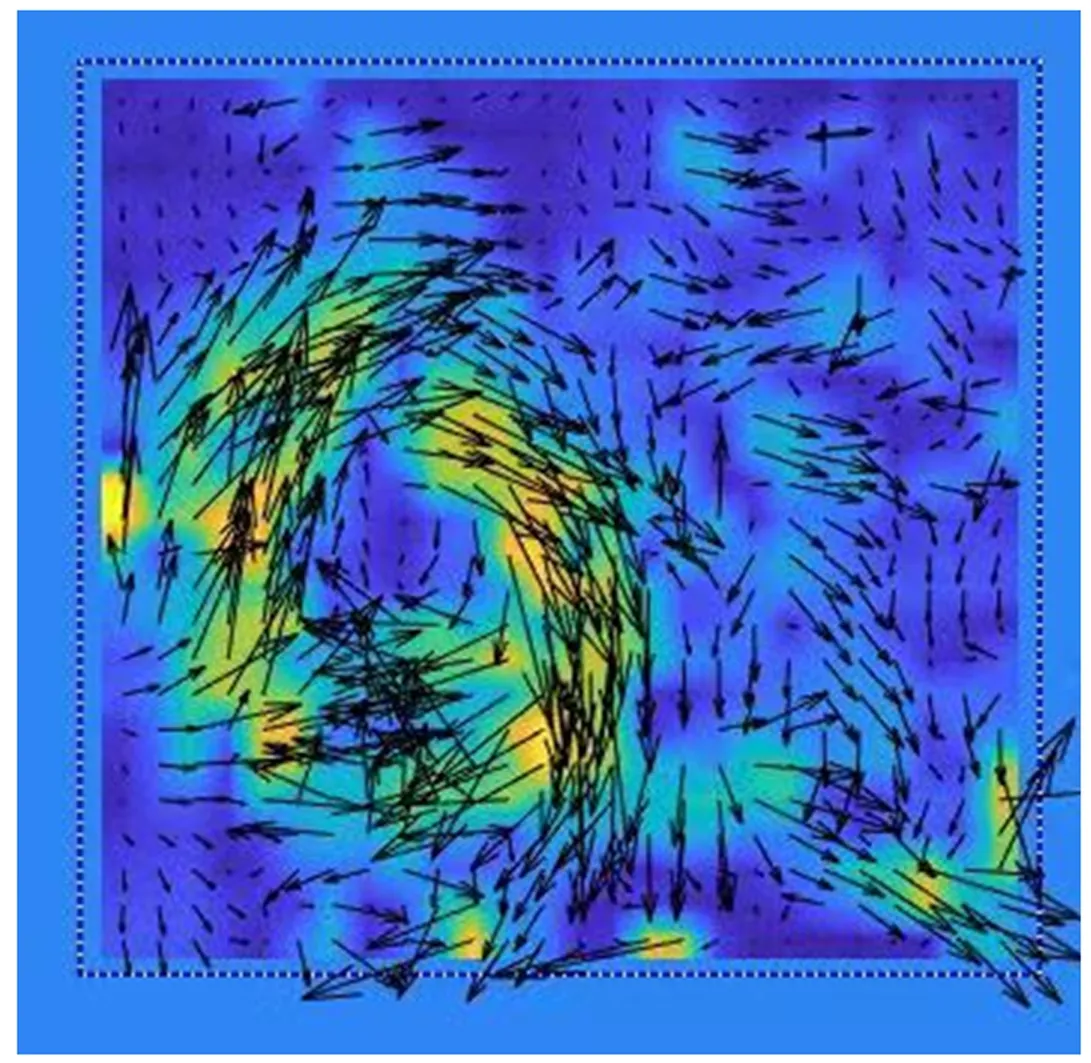
2)通过PIV L选取合适的分析区域,在设置pass 1 的interrogation area为35,step为32,pass 2 的interrogation area为32,step为16,分析得到图9所示的矢量分析图.
可以看出,在扇叶正上方产生的涡旋分析结果良好,能够明显看到涡旋.
3)导出涡旋的涡度分布图与速度分布图,如图10和图11所示.
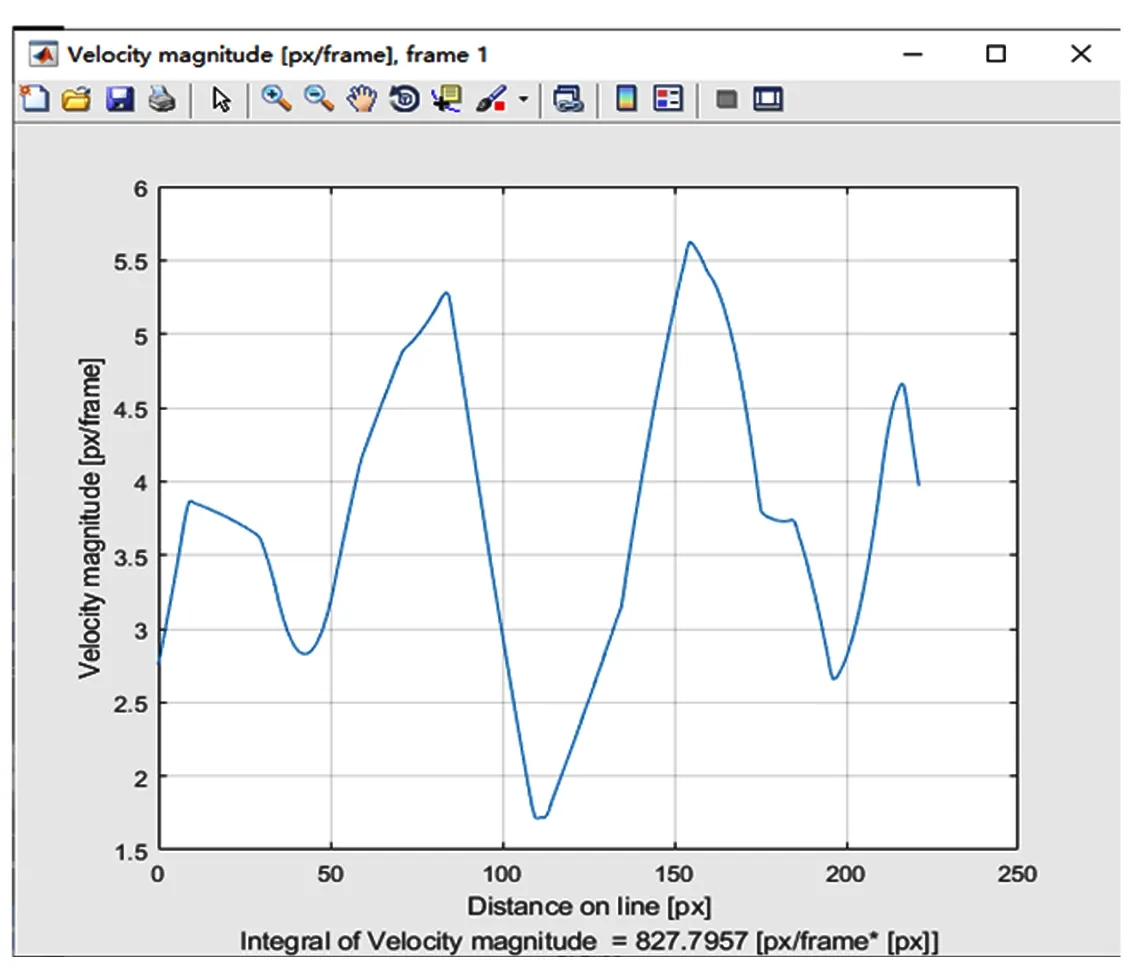
4)取过涡旋中心的1条直线,可以得到此条直线上的涡度数据与速度数据如图12和图13所示.
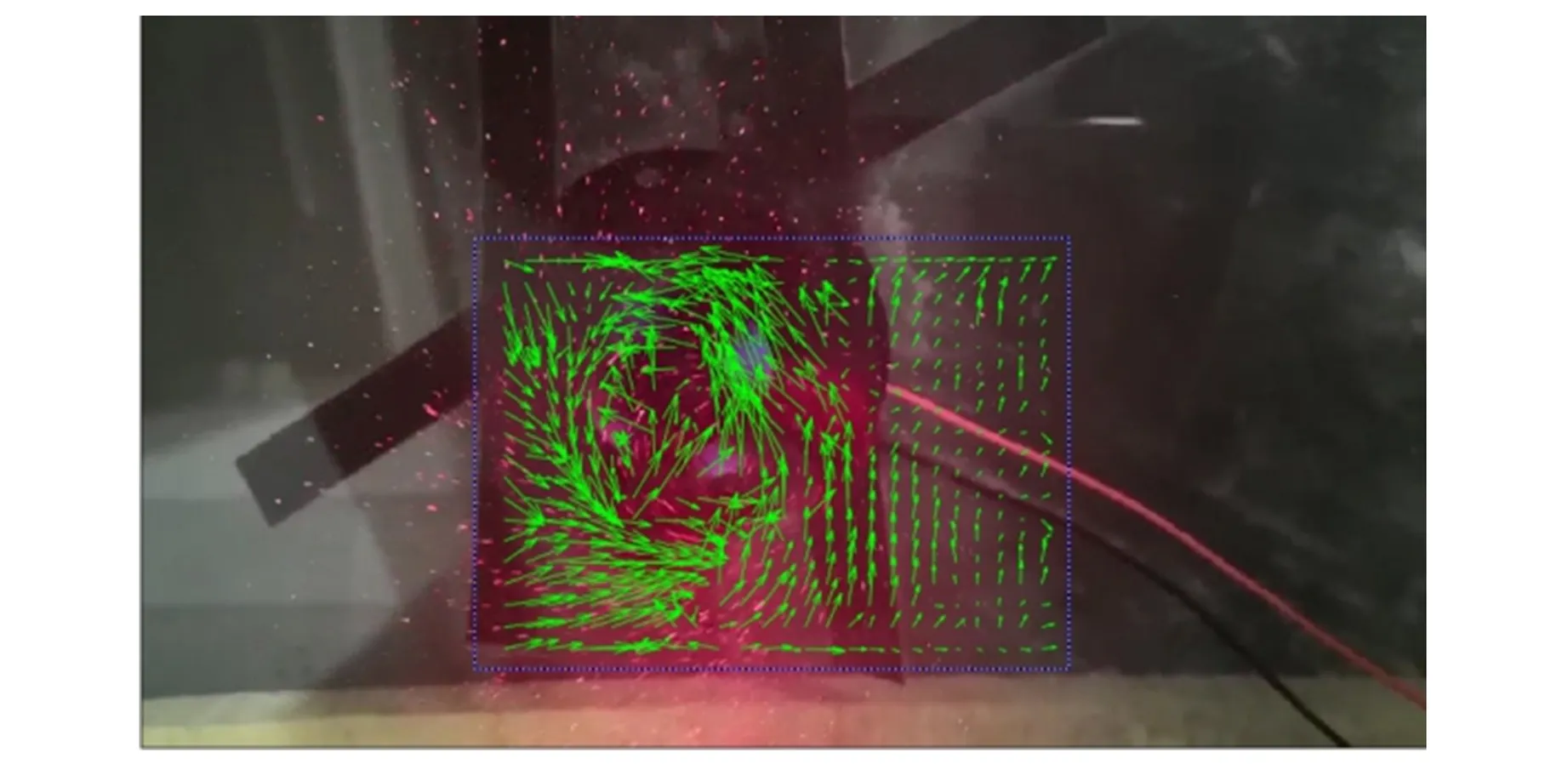
图9 涡旋矢量图
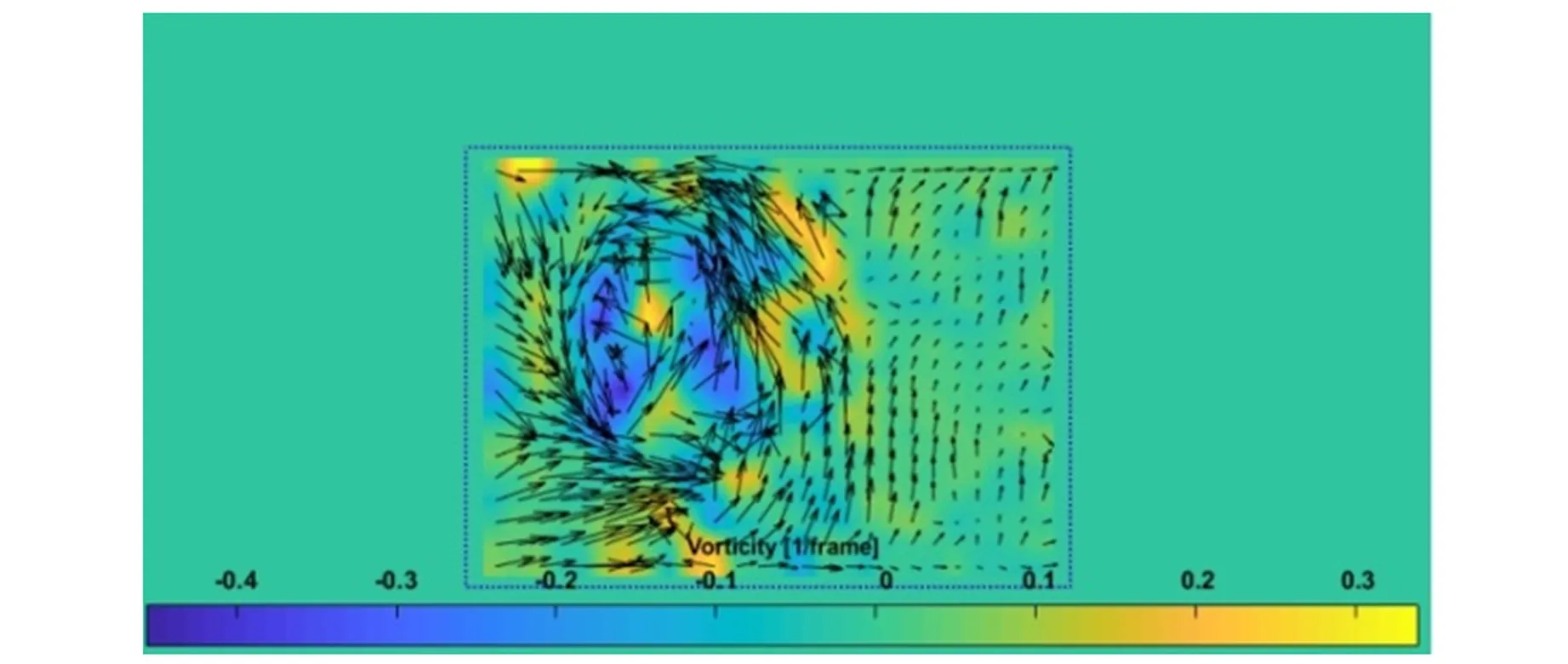
图10 涡度分布图
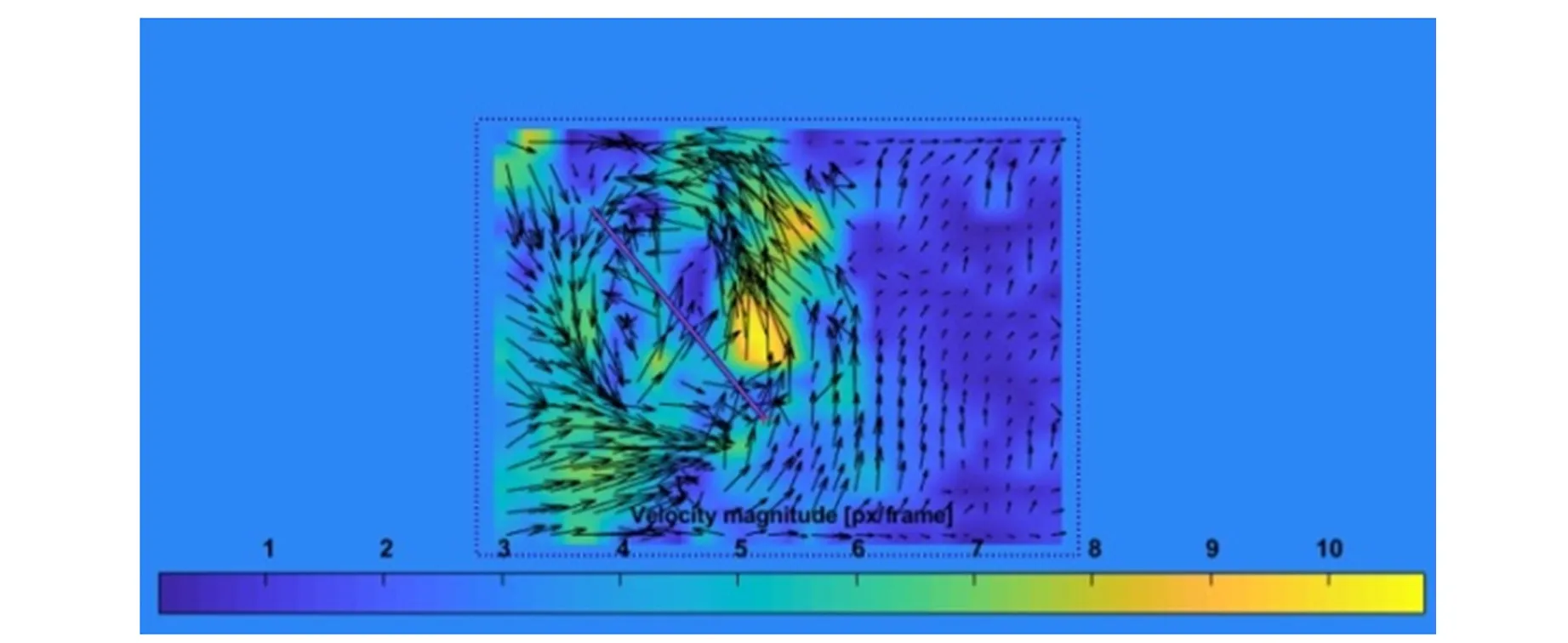
图11 速度分布图
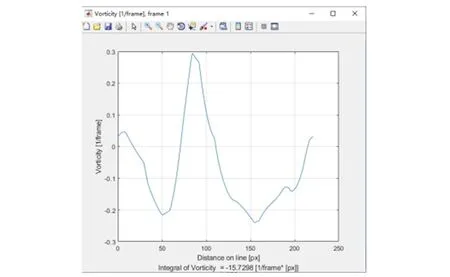
图12 涡度数据图
可以看出在涡旋结构的中央,即扇叶直接作用区存在速度低值区,而在此区域外速度大小将快速增加直至达到最大值,后速度大小沿径向缓慢降低. 与速度分布规律相反的是:涡度最大值位于涡心处,后沿径向迅速减小直至涡度达到最低值,此时的涡度小于零. 随后涡度开始向正值移动,靠近边界处的涡度值再次下降,并沿径向缓慢恢复至零涡度. 此分析结果与实验原理部分中涡旋理论分析结果一致,表明该实验数据合理[14].
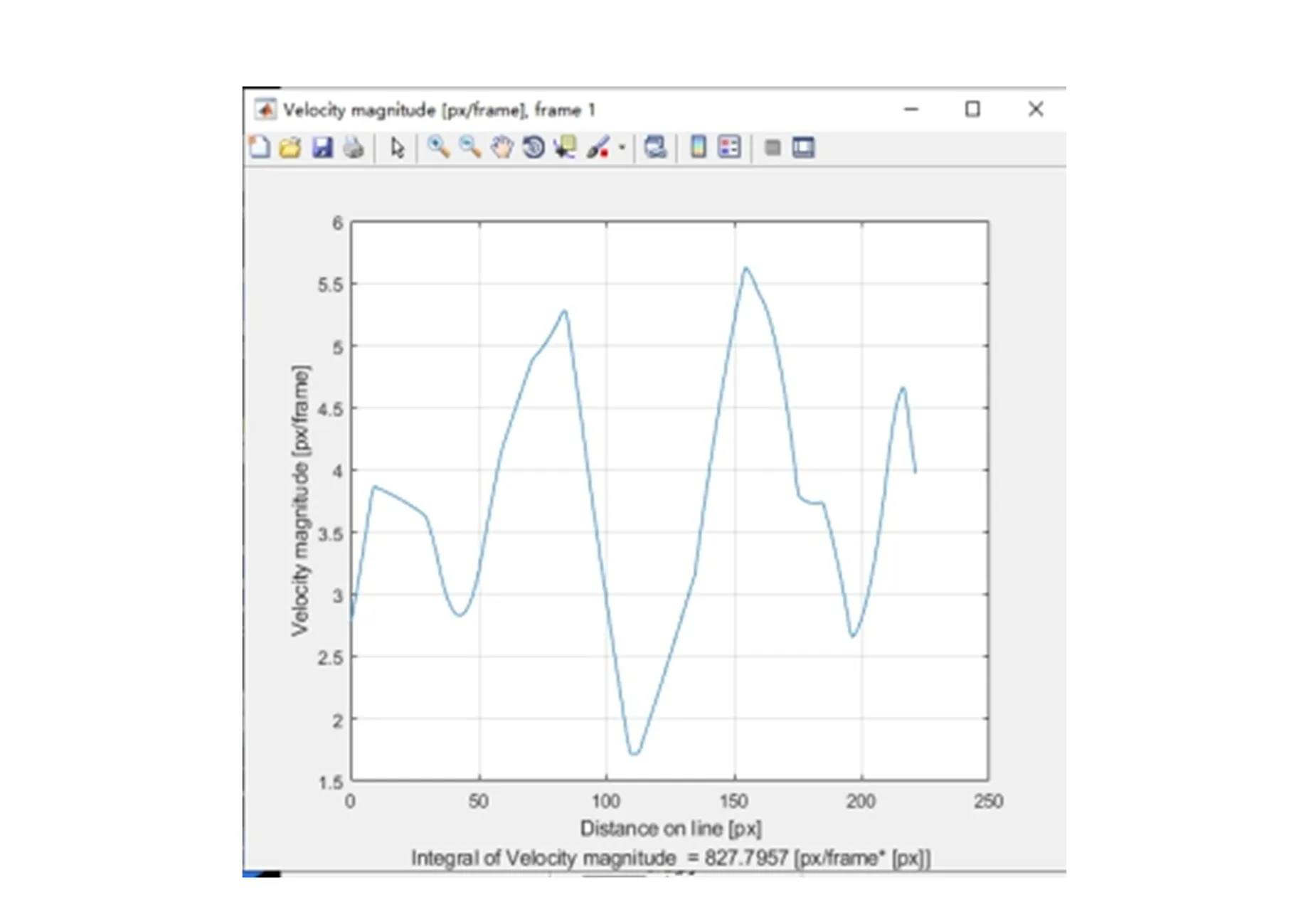
图13 速度数据图
3.3 不同扇叶半径的对比分析
为了达到较好的实验效果,在实验最开始设置了扇叶半径为3cm,4cm及5cm的对比实验,并得到其各自的涡度矢量图,通过对比确定效果最佳的方案,结果如图14~15所示.
由图14~15可知:选取半径为3 cm的扇叶进行实验时,能够产生明显的涡旋,但是分析效果不好;选取半径为4 cm的扇叶进行实验时,既能够有良好的涡旋产生,且数据分析效果很好;选取半径为5 cm的扇叶进行实验时,不能够产生完整的涡旋. 综上所述:在基于现有实验条件下,半径为4 cm的扇叶最为合适.
3.4 不同转速的对比分析
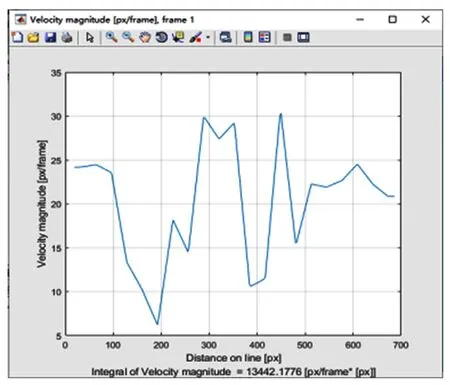
控制电机占空比在0~100%可调,在实验最开始设置了0,40%,88%对比实验,发现在占空比为88%的情况下,产生的涡旋更便于后续的处理分析,且效果较好. 而占空比为0的情况下,产生大量气泡,影响涡旋的测量. 在占空比为88%的基础上,设置占空比为80%,88%,96%,并得到其各自的速度分布图(图16)和涡度分布图(图17),通过对比确定较为合适的转速.
结果发现,涡旋的速度和涡度大小随着占空比的增大而增大,当占空比为88%时,涡旋处理效果最为显著并且实验数据更为稳定可靠.
(a)3 cm
(b)4 cm

(c)5 cm
图14 不同扇叶半径下的涡度矢量图
(a)3 cm
(b)4 cm

(c)5 cm
图15 不同扇叶半径下的涡度数据图

80%
88%
96%
图16 不同占空比下的速度分布图

80%

88%
96%
图17 不同占空比下涡度数据分布图
4 结束语
从理论上分析了流体涡旋产生的原理和相关物理性质,并依据相关原理设计实验装置,实现了电机驱动扇叶情况下结流体中涡旋生成、移动、测量的过程,并通过对涡旋具体结构和物理量分布规律的观测分析,定性地验证涡旋速度和涡度的分布规律. 经数据分析处理,得出结论,涡旋速度从涡旋中心向两侧逐渐增大,到达电机扇叶边缘即涡旋内部边界之后,速度迅速减小;涡度最大值位于涡旋内部即电机扇叶以内,超过扇叶半径后沿径向迅速减小,与理论分析一致. 同时实验装置可控性强,操作简便、数据可视化,有利于更好地理解涡旋在完整的运动和移动过程中具有的状态及其产生的影响.
