船用卫星电视接收设备伺服跟踪系统设计
2020-06-11郎杰陆正文
郎杰 陆正文
(桂林长海发展有限责任公司 广西壮族自治区桂林市 541001)
随着我国远洋船舶的迅速发展,船用卫星电视接收设备已成为民用和商用船舶的常规配置。卫星电视基于无线传输电视节目、自动跟踪卫星,不受船舶航行、摇晃影响,船舶距离远、信号覆盖广等因素,目前越来越受到重视[1]。本文介绍了一种先进实用的船用卫星电视接收设备伺服跟踪系统,利用三轴稳定、两轴跟踪伺服系统自动寻星和跟踪卫星,克服了舰船横摇、纵摇和艏摇的影响,保证电视接收信号的稳定连续性。
1 总体方案
船用卫星电视接收设备伺服跟踪系统主要由天线伺服控制单元和伺服传动单元两部分组成,组成框图如图1所示。
天线伺服控制单元主要由主控处理器、陀螺仪、倾角传感器、北斗定位模块、电机驱动模块、数据检波模块、调谐器等组成。伺服传动单元主要由电机、同步带减速器等组成。天线终端控制与天线伺服控制采用单轴同轴线连接。同轴线传输DC 24V,伺服控制数据及高频卫星电视信号。系统开机后,天线伺服控制依次完成天线初始化、搜星和跟踪过程。同时,伺服控制需完成与终端数据交互换星功能。
2 主要单元技术实现
2.1 控制处理器及驱动
控制芯片采用32为DSP处理器,其整合了DSP和微控制器的最佳特性,其具有丰富的数字输入输出口、通信口、专用电机控制PWM输出口等。该DSP提供的外设资源(如事件管理器,AD转换器等)主要针对控制领域设计,因此,采用该DSP实现运动控制能充分发挥其特性。伺服电机采用步进电机,驱动芯片选用集成步进驱动芯片,驱动芯片64细分可实现伺服的精细转动。
2.2 调谐器(信标机)
每个地球同步卫星都有自己固定的信标频率与信标强度,用于区分不同的卫星。通常,信标机是一个由下变频器、锁相环路以及自动增益控制电路所组成的锁相式接收机,它能够消除因信标频率漂移而引起解调后信标电平的起伏,从而使信标接收机的输出直流电压(AGC)真实地反映卫星信号强度。伺服控制单元通过检测AGC的电平变化,实时控制天线对准卫星。
2.3 陀螺仪
舰船卫星电视接收控制系统的方位、俯仰和横滚系统的控制回路中,采用的主要传感器都是陀螺仪。陀螺仪用以感测天线运动角速度,进而控制所天线的姿态,它输出的是角速度值,再进行时间上的积分就是角度值了。本系统采用的陀螺仪为微机械原理陀螺仪,内部的硅素超微精密环型传感技术使其具有高性能、防水、抗振动、质量轻、防电磁干扰等特性,不间断机内自检技术、滤波算法解决

图1:伺服分系统组成框图
了陀螺仪由于周围噪声或震动干扰源对其数据的影响。
2.4 北斗定位
在舰船移动卫星电视接收系统中,定位设备用来确定初始对星时载体的当地地理坐标(经度、纬度),设计中选用北斗兼容模块芯片,外置接收天线。伺服控制单元实时接收定位信息,通过卫星天线当前经纬信息及需跟踪星卫星经度,实时计算卫星天线的俯仰角、方位角和极化角,发生变化实时调整,保证舰船航行过程中卫星天线不丢星及接收到的信号质量(极化角影响信号质量)不减弱。
2.5 倾角传感器
倾角传感器在系统中的作用主要有两个,一是对俯仰角和横滚角进行水平初始化,二是定时补偿陀螺仪的温漂。数字双轴倾角传感器作为水平敏感元件,其内部是通过测量静态重力加速度变化,转换成倾角变化,测量输出传感器相对水平面的倾斜和俯仰角度。
2.6 数据检波模块
数据检波模块完成将单根同轴线上直流电源、RF信号及22kHz载波信号分离,从22kHz载波上分离控制指令,同时将反馈数据载波到22kHz上对外传输。传输协议遵守DiSEqC 2.0规范。电源、数据及RF信号三者之间互不干扰。
3 工作原理
3.1 天线初始化
船用卫星电视接收设备伺服跟踪系统对所有外设依次自检,同时从内部FALSH中读取搜星的基本参数,根据北斗给出的天线所在位置的经纬度和需要搜索卫星的经度,计算出天线对准卫星所需要的方位角、俯仰角和极化角。根据极化方式及极化角驱动电机转动到计算出的极化角位置,伺服控制根据倾角传感器数据将横滚轴调平并将俯仰轴转动到对星的俯仰角位置,随后天线进入陀螺稳定状态。方位、俯仰及横滚轴根据陀螺检测数据实时克服载体摇摆。
3.2 搜星
初始化完成后,伺服控制单元进入搜星工作状态。此时,伺服控制单元首先对信标机(调谐器)中检波频率及符号率配置,以便可以检测信号强度AGC。若存在罗经数据,控制终端将罗经数据传给伺服控制单元,方位电机直接转动到对星的方位角位置,否则方位进行圆扫一周寻找最大AGC位置,最大AGC位置即对星的方位角位置。在对星方位角及俯仰角位置为中心,方位±3度,俯仰±3度进行螺旋转动寻找最强AGC值,然后天线转动到最强AGC值的位置。天线搜星程序流程如图2所示。
3.3 卫星跟踪
天线进入跟踪状态后,方位、俯仰及横滚轴实时克服载体摇摆以保持稳定状态。同时,锥扫电机开始工作,根据AGC的变化实时调节天线的方位轴及俯仰轴,使AGC值一直保持最大且稳定。若AGC值偏离门限,则结束跟踪转入搜星状态。卫星跟踪程序流程如图3所示。
3.4 数据交互及换星操作
天线伺服控制实时将卫星天线运行状态信息传回控制终端,控制终端完成人机交互显示。同时在有罗经的情况下,控制终端将罗经角度实时传输给天线伺服控制。
当有换星要求时,控制终端将所需搜索的卫星参数(极化方式、卫星经度、本振、下行频率、符号率)传输给天线伺服控制。伺服控制将卫星参数保存在内部FALSE内,结束当前工作状态,随后重新调用初始化程序。保存卫星参数便于下次开机自动跟踪。
3.5 圆锥扫描原理
本系统采用圆锥扫描方式实现天线的精对准。圆锥扫描是指依靠馈源喇叭绕对称轴作圆周运动或副反射面旋转而产生一个旋转射束。副反射面倾斜旋转,可以使天线波束围绕旋转轴以一定的频率(该频率就是旋转电机的旋转频率)呈圆锥状旋转。当卫星偏离旋转轴方向时,接收信号是被波束旋转频率调制了的信号,调制的幅度和相位分别取决于卫星偏离旋转轴的大小和方向。信标接收机检测出该调制信号并用波束旋转时产生的正交基准信号对检出的调制信号进行方位、俯仰相敏解调,解调出的直流误差信号(AGC)控制天线向误差减小的方向转动,直到检测出的调制信号为最小。
3.6 平台稳定工作原理
系统设计采用三轴框架式设计,以保证最大程序解耦,达到简化控制的目的。天线的方位、俯仰、横滚三个转动轴两两相互垂直,横滚转动轴平行于天线底座,方位转动轴垂直于天线底座,俯仰转动轴的状态受横滚电机驱动的影响。横滚陀螺安装在天线转动架上,其角速度感应轴线平行于天线的横滚转动轴;俯仰陀螺安装在天线横梁上,其角速度感应轴平等于天线的俯仰转动轴;方位陀螺安装在天线转动架上,其角速度感应轴平行于方位电机转动轴。为了保证系统稳定的快速性和稳定精度,选用了空间角速度传感器与空间绝对位置传感器相结合的传感方式。依靠角速度陀螺的响应实时补偿、利于倾角传感器作为稳定基准克服系统偏差。

图2:搜星程序流程
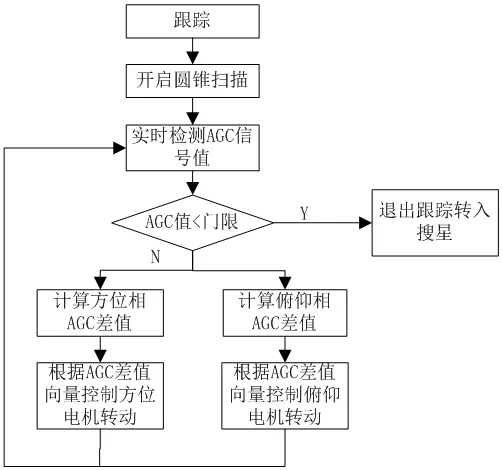
图3:跟踪程序流程
4 结论
试验表明,船用卫星电视接收设备伺服跟踪系统能稳定高可靠的工作,不受船舶航行、摇晃影响,提高了卫星电视接收设备的跟踪速度,后续可对系统的前置反馈、闭环控制等算法进行改进,将神经网络算法、模糊PID算法等提高控制精度的算法应用到设计中。
