基于3-DDS和分数时延的卫星导航信号模拟方法*
2020-06-10王增柱季海福
王增柱,季海福,吴 琼
基于3-DDS和分数时延的卫星导航信号模拟方法*
王增柱,季海福,吴 琼
(北京遥测技术研究所 北京 100076)
提出一种基于3-DDS和分数时延的卫星导航信号模拟方法,结合DDS和分数时延滤波器的优点,用于实现高精度、高动态的时延控制,与传统时延控制方法相比,具有时延稳定性好、通道一致性易于控制、资源耗费少的特点。
3-DDS;分数时延;高精度高动态时延控制;卫星导航
引 言
直接数字频率合成技术DDS(Direct Digital Synthesizer)是模拟导航卫星和载体之间相对运动的常用方法[1]。利用DDS分别模拟相对速度、相对加速度和相对加加速度信号,将三个DDS级联起来,形成3-DDS动态信号模拟方法,可实现导航信号的高精度、高动态模拟[2]。该方法的优点在于产生的信号精度很高(取决于DDS的位数),动态容易控制,适合产生各种需求的动态信号;缺点在于瞬时精度差、信号抖动较大[3]。
分数时延滤波器是实现高精度信号模拟的另外一种方法。分数时延滤波器优点在于信号稳定、瞬时精度好,不存在抖动问题。模拟高动态信号时,需要较高的时延参数更新速度[2]。分数时延滤波器参数运算量较大,更新速度不能太高。因此分数时延滤波器在高动态信号模拟方面有一定的难度。
本文将3-DDS信号产生方法和分数时延滤波器两者结合起来。利用3-DDS产生高动态的仿真信号,同时采用分数时延滤波器修正DDS的残差,从而充分利用了两者的优点,同时摒弃两者的缺点,解决了高精度、高稳定、高动态信号生成问题。
1 基本原理
1.1 3-DDS信号生成方法
3-DDS信号产生结构如下图1所示,由加加速度DDS、加速度DDS、速度DDS三阶动态控制单元级联而成[2]。

图1 3-DDS模型


采用3-DDS的动态信号生成方法,理论上可以模拟任意加加速度、加速度和速度信号。由于受DDS固有特性的影响,3-DDS会存在累计误差以及随机抖动[3]。
1.2 高精度分数时延设计方法
分数时延可利用多速率滤波器方法或有限冲击响应滤波器方法实现[4]。多速率滤波器法实现的分数时延可用带宽较大,但是需要大量的逻辑资源,随着时延控制分辨率的提高,资源耗费会急剧增加,而有限冲击响应滤波器实现分数时延虽然可用带宽较多速率滤波器法要小,但是设计简单,资源耗费少,时延分辨率的提高不会导致资源耗费的大幅增加。由于目前卫星导航信号一般为有限带宽,对于卫星导航应用来说,通过选择合适的采样频率,可以避免有限冲击响应滤波器设计方法的带宽限制。因此,在本文中,采用有限冲击响应滤波器方法实现分数时延。
有限冲击响应分数时延设计方法基于不同的FIR滤波器系数具有不同的相位时延的特点。延迟为D的离散时间延迟系统可以表示为[4]

根据时延D设置不同的滤波器,就可以实现高精度的时延控制。
N阶FIR滤波器的系统函数可以表示为

其频域可以表示为

理想的具有时延D的滤波器具有以下频域形式:

为整数拍延迟,为小数延迟,0≤≤1,因此式(5)可以写为

可以直接采用锁存器实现,因此,将上式简化为
为需要延迟的小数部分。
所要做的工作就是设计滤波器系数(),使得频域误差函数的范数最小。

将式(7)写为

需要设计的目标滤波器频域可以将实部和虚部分别表示为一系列余弦函数相加和正弦函数相加的形式[5]

上式的Z域形式为

经过推导[5],可以得到系数序列
其中,



其中,a,b为由分数延迟以及确定的中间系数,将式(12)得到的一系列值代入式(11),就可以得到时延为的滤波器系数(),是由滤波器阶数决定的中间变量。
1.3 基于3-DDS和分数时延的时延控制方法
本文中,将3-DDS和分数时延滤波器结合起来,如图2所示。

图2 3-DDS+分数时延滤波器功能图
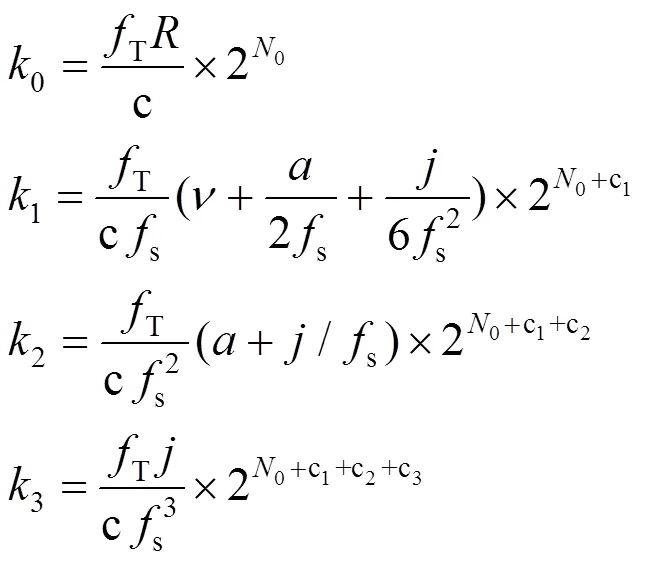
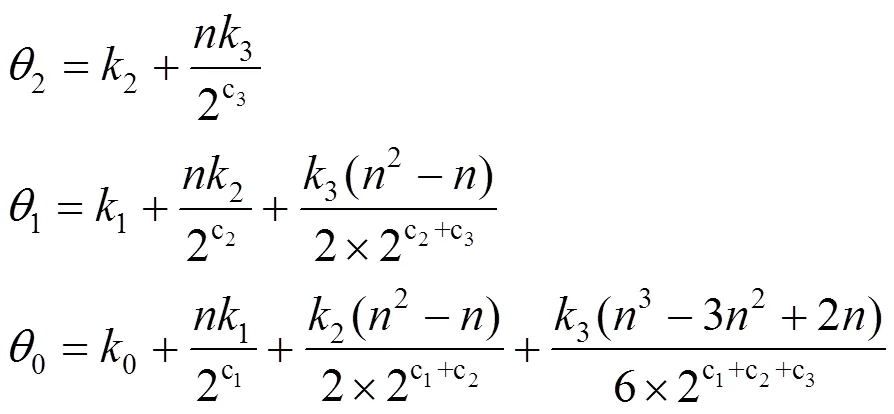
基带信号处理软件将动态仿真软件产生的动态信息,按照式(1)映射为3-DDS控制参数,产生动态仿真信号;将3-DDS的输出与理论值进行比对得到DDS的误差信号,此误差信号控制分数时延滤波器的时延;同时也可以直接设置数字时延滤波器的延迟,用于对基带信号的时延量进行外部控制。
按照运动学方程,由速度、加速度和加加速度得到的理论输出由下式确定

其中/s为动态更新时间,≥0

由式(17)和式(2)得到误差信号

令=e×c/T,将代入式(12),得到时延滤波器的控制参数,控制数字时延滤波器的时延,从而修正3-DDS的误差。
2 分数时延仿真结果
图3~图6为不同的分数时延和时延为0.001~0.009个采样时钟(采样率为140MHz)的仿真结果。
图3 M=2,d=0.001~0.009的幅频与相频响应
Fig. 3 Amplitude and phase frequency response M=2, d=0.001~0.009
图4 M=3,d=0.001~0.009的幅频与相频响应
Fig. 4 Amplitude and phase frequency response M=3, d=0.001~0.009

图5 M=4,d=0.001~0.009的幅频与相频响应
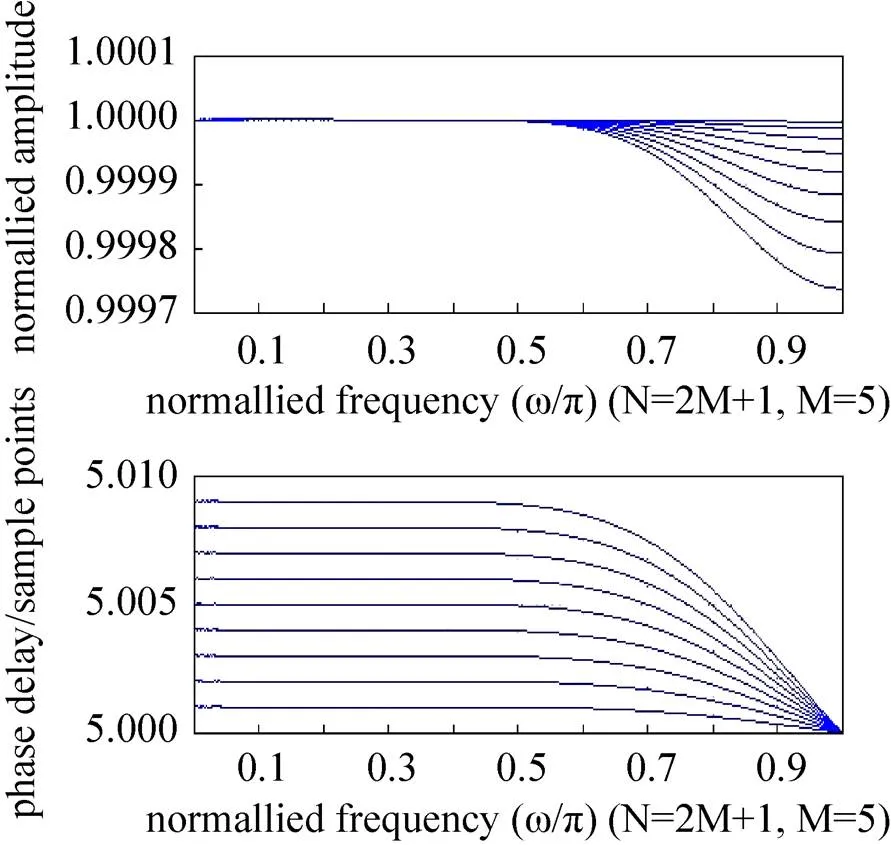
图6 M=5,d=0.001~0.009的幅频与相频响应
从图3~图6分数时延的相频响应曲线可以看出:采用限冲击响应滤波器法设计的分数时延准确反映了信号的延迟。从幅频响应曲线可以看出:当为2时可用带宽约为0.3,为3时的可用带宽约0.4,=4为0.5,>4后,可用带宽没有明显变化。综合滤波器性能和资源耗费,选取=3,对应的滤波器阶数为7。
3 工程验证
验证器件采用Altera公司的Cyclone III EP3C120 FPGA,编译工具为Quartus II 9.0。表1为采用本文所述的有限冲击响应法和采用多速率滤波器法实现的分数时延滤波器的比较。
由表1可以看出,采用本文有限冲击响应滤波器方法设计的分数时延滤波器,在实现相同精度的延迟时(理论精度2mm),虽然可用带宽较多速率滤波器差0.1,但是耗费的资源远小于多速率滤波器法。
在实验室条件下,采用如图7所示的方法对本文提出的方法进行评估。模拟信号为北斗二代B3I,频率为1268.52MHz。采用自研软件接收机对信号动态和时延控制精度进行验证(图中的高速示波器用于标定模拟器初始零值[6])。
动态仿真测试结果如表2所示。
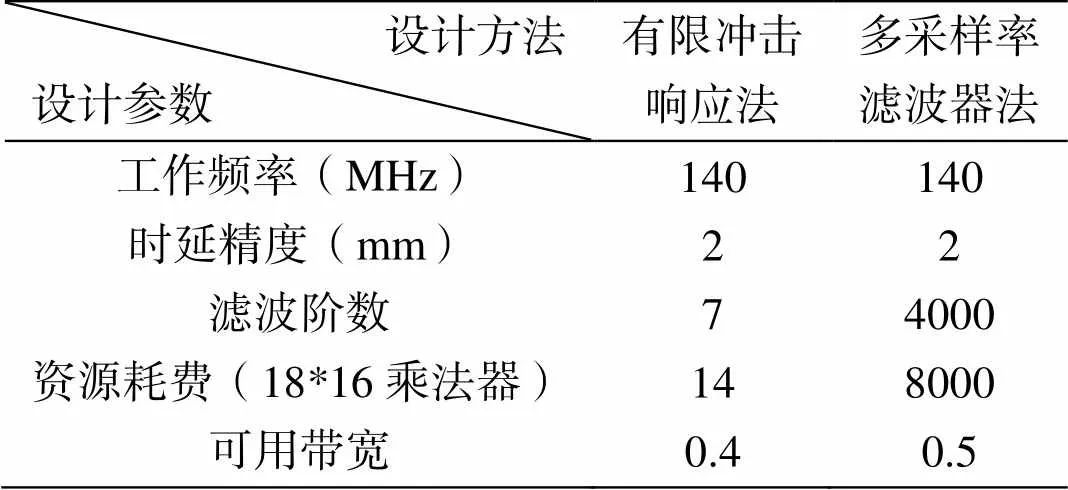
表1 不同分数时延实现方法比较
可以看出:信号模拟误差不随加加速度的增大而变大,在1000m/s3动态条件下误差只有0.524mHz。同样,分别设置模拟器的信号延迟为0.0m、0.2m、0.4m、0.6m、0.8m、分别测量10组,每组平滑时间150秒,记录如表3所示。
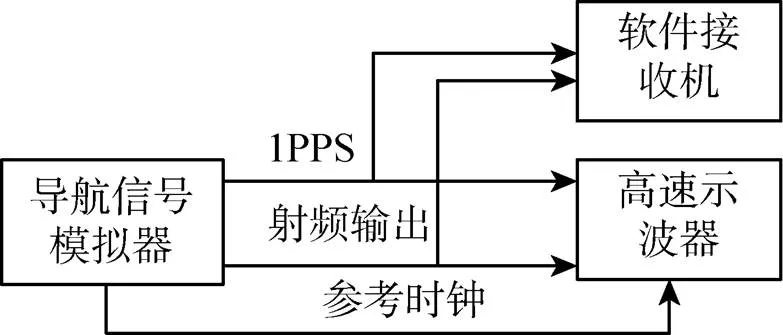
图7 信号动态和时延测量

表2 动态仿真误差
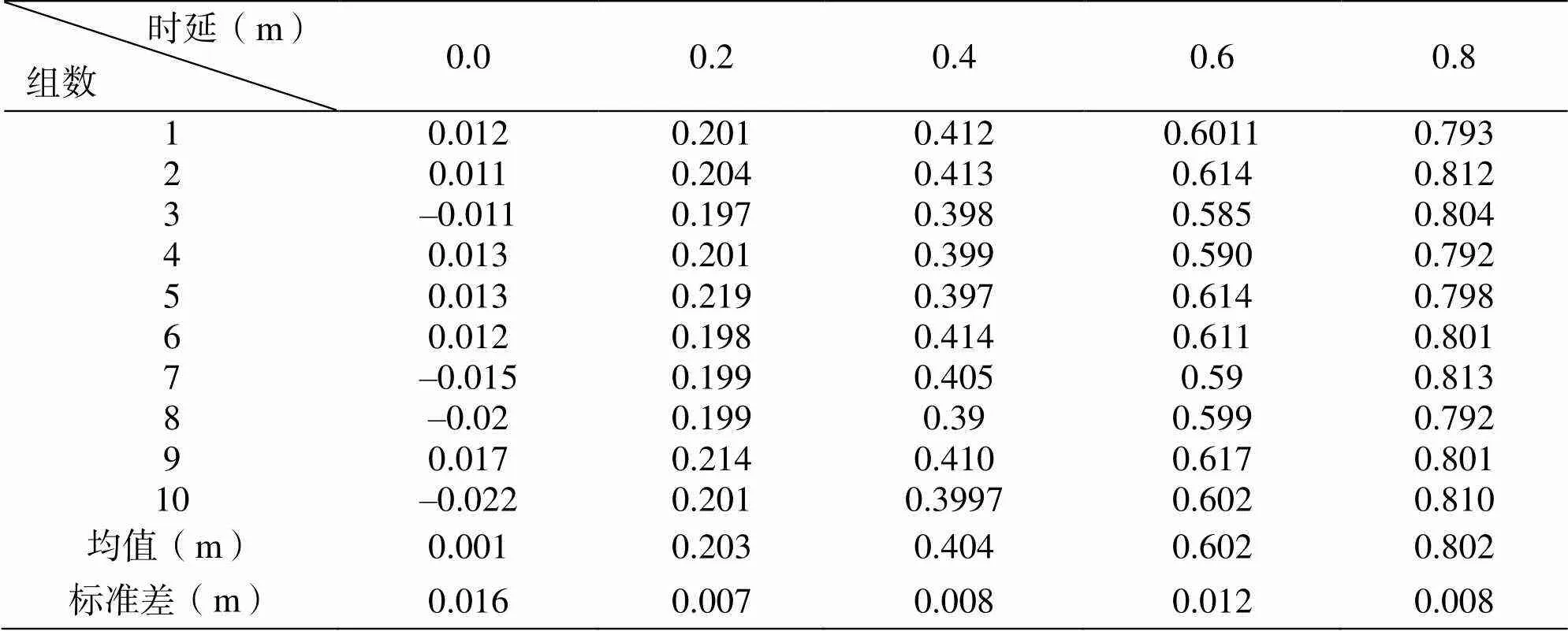
表3 信号延迟测量
从表3中可以看出,本文的时延模拟方法时延控制准精度优于4mm,抖动小于2cm。
4 结束语
本文采用的基于3-DDS和分数时延信号模拟方法,以较少的资源实现了导航信号的高精度、高稳定、高动态模拟。本技术已经成功应用于多款卫星导航信号模拟器工程型号中,取得良好的效果。在下一步的工作中,将进一步改进算法用于多天线阵列信号的高精度模拟以及雷达信号的延迟控制。
[1] 李成军, 陆明泉, 冯振明. GPS中频信号模拟器的数学模型及实现[J]. 清华大学学报, 2008, 48(10): 1582–1585. LI Chengjun, LU Mingquan, FENG Zhenming. Mathematical model and realization for GPS IF signal simulator[J]. Tsinghua Univ (Sci & Tech), 2008, 48(10): 1582–1585.
[2] 宋媛媛, 曾大治, 曾涛. 基于三阶DDS的卫星信号多普勒模拟方法[J]. 北京理工大学学报, 2010, 30(10): 1213–1216. SONG Yuanyuan, ZENG Dazhi, ZENG Tao. Satellite signal doppler simulation method based on third-order DDS[J]. Transaction of Beijing Institude of Technology, 2010, 30(10): 1213–1216.
[3] KHOUAS A, IZOUGGAGHEN B, SPURS SAVARIA Y. Modeling in direct digital period synthesizer related to phase accumulator truncation[C]//2004 IEEE International Symposiun on Circuits and Systems –Proceedings, 2004, 3(5): 23–26.
[4] TIMO I L, VESA V, MATTI K. Splitting the unit delay FIRall pass filters design[C]//IEEE Signal Processing Magazine, 1996: 30–60.
[5] PEI Soochang, LIN Hueishan. Closed-form design of maximally flat FIR fractional delay filters[C]//ISCAS, 2006: 2817–2820.
[6] 陈锡春, 谭志强. 北斗用户设备测试系统的测试及标定[J]. 信息工程大学学报, 2015, 16(3): 318–320. CHEN Xichun, TAN Zhiqiang. Testing and evaluation of the testing system for compass user terminals[J]. Journal of Information Engineering University, 2015, 16(3): 318–320.
Satellite navigation signal simulation based on 3-DDS and fractional delay
WANG Zengzhu, JI Haifu, WU Qiong
(Beijing Research Institute of Telemetry, Beijing 100076, China)
The method of simulating satellite navigation signal based on 3-DDS and fractional delay filter is proposed in this paper. The method, which combines the advantages of DDS and fractional delay filter, is designed to generate high-accurate and high-dynamic delay signals. Comparing to the traditional delay controlling techniques, this method can realize more stable delay control, has better channel consistency and requires fewer resources.
3-DDS; Fractional delay; High-accurate and high-dynamic delay control; Satellite navigation
TN98
A
CN11-1780(2020)01-0034-06
Email:ycyk704@163.com
TEL:010-68382327 010-68382557
国防重大项目支持
2019-08-19
王增柱 1976年生,硕士,高级工程师,研究方向为卫星导航信号处理以及卫星导航信号模拟器。
季海福 1980年生,博士,高级工程师,研究方向为卫星导航系统设计。
吴 琼 1987年生,硕士,工程师,研究方向为卫星导航信号模拟器。
