基于综合判断法的高压开关设备机械特性在线监测技术
2020-06-09向新宇刘伟浩钱少锋陈巧勇
许 挺,向新宇,刘伟浩,钱少锋,陈 炜,尤 敏,陈巧勇,汤 明
(国网浙江省电力有限公司杭州供电公司,杭州 310009)
0 引言
随着我国经济社会的发展,人民物质水平的提高,对电量的需求越来越大,使得电力系统也在不停地扩张。为了保证电力系统能够稳定、安全、可靠地运行,国家提出了坚强智能电网的发展规划,因此也对电力系统中配套监控设备提出了更高的设计要求。电网工程能够安全、稳定地运行,与大量高压开关设备的使用密不可分。科研人员发现,在历年高压开关设备重大事故中,机械结构故障、SF6泄漏、避雷器性能降低、断路器触头接触不良等故障是主要诱因。为保障供电的安全、可靠、稳定,监测并解决高压开关设备潜在的故障刻不容缓[1-5]。
高压开关设备是用来控制输配电过程中电流的通断,广泛应用于电力系统。高压开关设备中集成了高压隔离开关、断路器、驱动电机、操作机构、避雷器等设备部件,很多零部件集成在一起,空间很小,因此对于开关设备三相间的绝缘特性有很高的要求,目前较多的高压开关设备使用SF6气体进行绝缘。据统计,断路器故障70%来自于机械结构,例如因油脂凝固导致断路器电磁驱动机构卡涩、分合闸速度降低、电机线圈烧毁等现象时有发生,上述故障不仅会给社会造成经济损失,同时也会对用户的生命财产安全构成威胁[6-10]。
断路器机械特性直接反映其工作状态,目前基本上采取定期离线式检测方法对断路器进行检修与维护。随着国家提出建设智能电网的要求,高压开关设备的智能化已成为必然的发展趋势,传统离线式的检修方式已经越来越不能满足实际需求。为此本文提出一种基于综合判断法的高压开关设备机械特性在线监测技术,利用加速度振动判断断路器刚分和刚合点,结合位移传感器解决了断路器触头开距和超程在线监测的难题,同时提出多层感知机的断路器触头超程状态自动识别方法,实现对断路器触头磨损状况的实时监测,满足供电公司为防止误判需要双验证的要求;提出基于电流分析法的断路器电磁驱动机构机械特性在线监测方法,解决了断路器存在机构卡涩、线圈断线、分合闸速度降低等在线监测难题,可真正实现由计划检修到在线监测的转变[11-15]。
1 基于电流分析法的断路器电磁驱动机构机械特性监测方法
针对断路器故障,本文提出一种基于电流分析法的断路器电磁驱动机构机械特性监测方法,可以准确判断断路器电磁驱动机构是否存在卡涩、线圈是否断线等缺陷[6-8]。
通常断路器电磁驱动机构采用220 V 直流电机,为了测量电磁驱动线圈电流,本文采用穿心式霍尔电流传感器,将电流信号转换为电压信号,再经过微处理器A/D 采集,便可以准确得出电磁驱动机构线圈电流的大小,并可绘制出电流-时间曲线。电磁驱动机构线圈电流一般为1~2 A,线圈电流-时间曲线如图1 所示,图中A 点表示电磁驱动机构连杆出现移动,储能弹簧也会随之发生相应的形变;C 点和D 点表明电磁驱动机构连杆到达最大位移处;E 点表示到达最大位移处;F 点表示主控触头开始动作;G 点表示辅助触头也开始动作;H 点表示电磁连杆恢复,储能弹簧无形变。
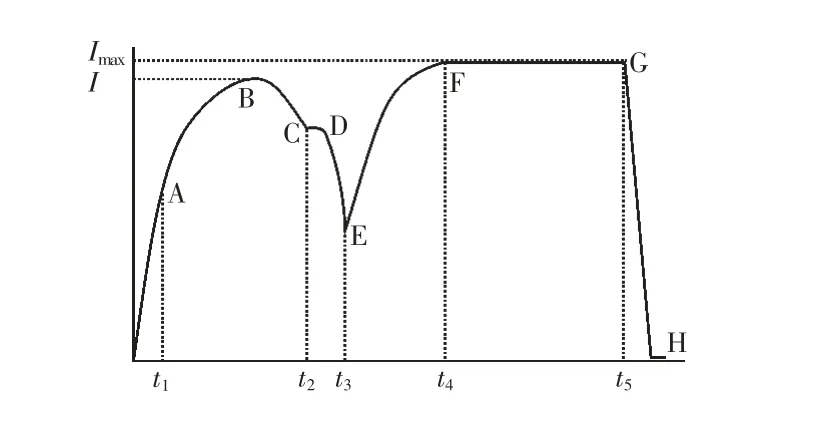
图1 断路器电磁驱动机构线圈电流-时间曲线
分析图1 可得: B 点位置变高,表示驱动电流增加,说明断路器电磁驱动机构存在卡涩,如果没有电流曲线,或者电流曲线突然消失,表明电机线圈断线;G 点向右移动表明机构动作时间较长,电磁驱动机构卡涩。
2 触头开距和超程在线监测
2.1 断路器触头刚分和刚合点的判断
断路器由于经常在满负荷下开断,势必造成触头磨损,进而导致触头接触面积减小,最终引发断路器触头发热,严重时会使开关设备烧毁。为了解断路器触头磨损情况,供电公司目前均是采用停电离线检测的方法,需要将断路器从开关柜上拆除,然后停电进行离线检测,这种检测方法不但不能及时发现断路器触头磨损情况,而且停电也给用户带来经济损失,同时还需要大量的人力和物力投入。
断路器工作状态如图2 所示,为验证本文所提加速度振动法的正确性,利用传统离线电压激励法判断刚分和刚合点来进行对比试验。
进行离线式电压激励法试验时,在断路器回路加入5 V 直流激励电压源,为减小断路器回路电流,在断路器回路串联一个2 kΩ 的电阻,并形成回路,采用示波器跟踪电阻两端的电压信号,断路器分合闸操作时,通过曲线的跳变,判断出刚分和刚合点,薄膜传感器会在断路器刚分和刚合点瞬间发生形变,在刚分和刚合点处引起电压信号的突然变化,根据电压变化拐点,进而判断刚分和刚合点。

图2 断路器工作状态示意
采用加速度振动法和传统电压激励法在触头刚分、刚合点处均发生了明显的电压信号跳变,从而验证了加速度振动法获取刚分、刚合点的可行性。
2.2 断路器触头开距和超程在线测量
断路器的总行程=开距+超程[9-10],若获得总行程,再结合刚分和刚合点就可以获得开距和超程的具体数值。位移传感器测量原理如图3 所示。
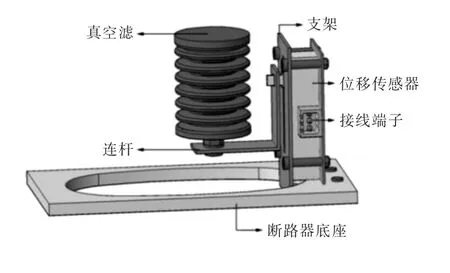
图3 断路器位移传感器测量原理
2.3 基于多层感知机的断路器触头超程状态识别
为进一步获得运行中的断路器触头磨损情况,本文又提出基于多层感知机的断路器超程模式识别新方法,以达到供电公司防止误判需双验证(利用不用方法或不同原理对同一事件进行验证)的要求。加速度振动传感器采集多组断路器分合闸加速度振动信号,通过Python 中的多层感知机函数提取振动信号特征,构造特征量,并建立触头超程状态(偏大、正常、偏小)数学模型;断路器分合闸动作后,将采集到断路器动作加速度振动信号传送到触头超程状态自动识别数学模型中,实现断路器触头超程状态的自动识别[11-12]。
2.3.1 神经网络多层感知机
(1)多层感知机
感知机是一种线性分类器,属于判别模式。另外一种是生成模式,通过输入特征信号,利用超平面将输入的特征信号分为两类甚至多类,感知机是神经网络和SVM(支持向量机)信息处理的基础。
对于一个输入信号,假如输入信号为X⊆Rn,输入空间是Y={+1,-1},其中X={X1,…,Xn},Xi为一个特征向量,。
定义从输入到输出的空间函数f(x)=sign(wx+b)为感知机,w 为感知机的比例权重,b 为偏置值,。
感知机最终得到的结果是在一个平面上,将各个类的点区分开。对于二维或者多维的平面,通过一条直线,或者多条直线对坐标系中的点进行区分,对于已经给出的一个点的坐标,或者是一个特征向量,便可以通过二维图来确定这个点的类别。
(2)多层感知机算法实现
模型、策略和算法是多层感知机的三大要素。根据感知机的数学模型,便可以实现感知机算法和学习策略,具体步骤为:
步骤1,确定需要初始化的w 和b。
步骤2,从训练中随机选取点(xi,yi),则预测值为sign(w·xi+b)。
步骤3,在预测过程中,如果准确率较低,或者是不正确,即sign(w·xi+b)≤0,则更改w 和b的值,继续预测。
步骤4,重复迭代步骤2 和步骤3,直至预测结果小于期望误差。
步骤5,输入未知点(xi+1,yi+1)的特征向量xi+1,yi+1=sign(w·xi+1+b)。在步骤3 中,通过更新w 和b的值,一般采用所有误差点到超平面的总距离,即,其中M 为所有误差点的集合。
根据最小梯度下降法,wi+1=wi+ηyixi,bi+1=bi+ηyi,η 为梯度下降速度。根据以上步骤,便可以构建多层感知机的数学学习模型,在本文中通过Python 语言来实现多层感知机函数。
2.3.2 多层感知机对超程状态的识别
结合2.1 中采集到的加速度振动信号,经过去除噪声处理之后,得到的加速度信号如图4、图5 所示,其中图4 为断路器合闸触头加速度振动信号,图5 为断路器分闸触头加速度振动信号。
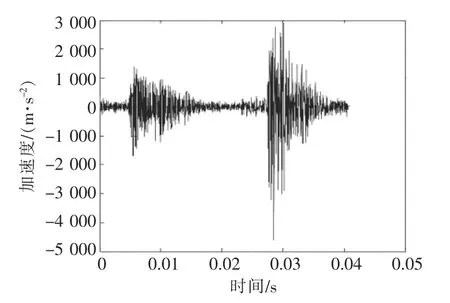
图4 断路器合闸触头加速度振动信号

图5 断路器分闸触头加速度振动信号
根据断路器设计参数可知,触头超程状态不能超过4.2 mm 而且不能小于3.3 mm。触头超程状态可分为三类: 正常状态(3.3 mm≤超程≤4.2 mm)、偏大状态(超程>4.2 mm)和偏小状态(超程<3.3 mm)。文中共选取了100 组断路器的动作数据作为训练样本,其中34 组为正常状态触头加速度数据,33 组为偏大状态触头加速度数据,33 组为偏小状态触头加速度数据,每组数据共有2 500 个点。利用多层感知机分类时,偏大状态分类标签为1,正常状态分类标签为2,偏小状态分类标签为3。通过多层感知机数学模型对100组数据进行迭代,最终运行结果显示,迭代准确率为95.2%,如图6 所示。
3 超程现场试验测试
为真实反映现场运行断路器的实际工作状况,将断路器置于与之配套的开关柜内,搭建了振动信号数据采集平台,如图7 所示。
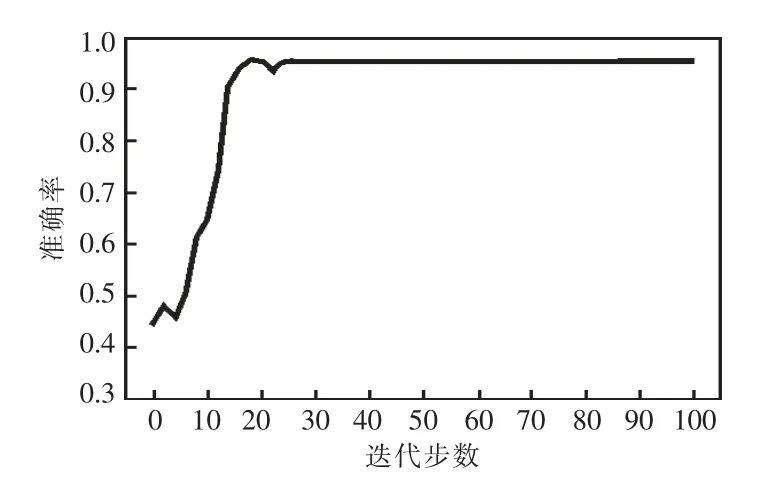
图6 断路器触头超程状态准确率

图7 现场数据采集平台
为验证数学模型的准确性,随机选取5 组超程偏大状态、5 组超程正常状态、5 组超程偏小状态动作加速度振动信号作为识别样本,样本预测结果如图8 所示。

图8 多层感知机预测结果
数据预测主要程序代码如下所示:
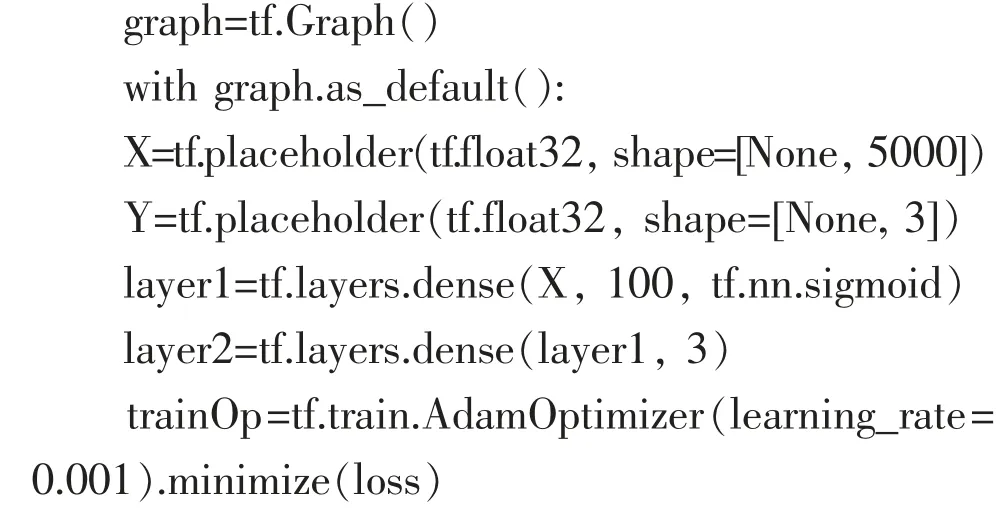
图8 中,空心点为断路器触头超程实际状态,实心点为预测值,经比对发现,多层感知机预测结果与实际结果完全一致,说明本文采用的多层感知机对断路器触头超程状态的识别具有很高的准确性,进而保证了对断路器触头超程状态识别的准确性。
4 结语
目前国内外处理断路器触头磨损、机构卡涩、线圈断线等缺陷还基本局限于离线式停电检修方式,而本文研究了高压开关设备机械特性在线监测技术,利用霍尔电流传感器对断路器电磁驱动机构线圈电流进行实时监测,根据其电流波形中所含信息,判断电磁驱动机构动作时是否存在卡涩、脱扣、断杆等故障;利用振动传感器准确获取断路器触头动作刚分和刚合点,并结合位移传感器获得触头动作位移;通过计算便可以准确得出断路器触头总行程、开距和超程等数据,间接判断断路器触头磨损情况,并利用多层感知机对断路器触头超程状态进行识别,采用Python编程语言,调用多层感知机函数,通过大量断路器动作加速度振动信号数据,对触头动作加速度振动信号进行学习,建立数学模型,对后期断路器的动作加速度振动信号进行识别,识别出断路器触头超程状态,从而预判出断路器触头磨损状态。在传统高压开关设备的基础上,结合控制、监测、通信等现代技术,使得开关设备具有自控制、自监测和自诊断的功能,将智能化的高压开关设备应用到电力系统中,不但会提高我国电力设备的智能化水平,还可以减少由于高压开关设备发生故障造成的经济损失,降低电力系统发生故障的概率,因此,设计并研制智能化的高压开关设备具有重要意义。
