一种高精度的无人驾驶农机系统研究
2020-06-08巩朋成谭颖詹云峰程慧芬李灵邓张惠王自强
巩朋成 谭颖 詹云峰 程慧芬 李灵 邓张惠 王自强

摘要:为实现农用机器的无人驾驶、高精度定位,设计一种高精度的无人驾驶农机系统。该农机系统以PixHawk飞控系统为核心,搭载传感器系统、通信系统、卫星定位系统等,可在远程调度中心设置农机工作地点、行进路线以及作业方式等功能。该系统通过卫星高精度导航技术使农机在无人驾驶的情况下,可使农机精准、快速达到任务点并进行工作。此外,操作平台选用NuttX平台,可对该系统进行二次开发。关键词:定位;精准农业;无人驾驶;高精度
中图分类号:P228.4 文献标识码:A
文章编号:0439-8114(2020)04-0141-06
Abstract: To realize the unmanned and high-precision positioning of agricultural machinery, a high precision positioning system of unmanned agricultural machinery was designed. The remote control center system based on Pixhawk flight controller, including sensor module, communication module, satellite positioning and other modules, and was mainly responsible for setting up the agricultural machinery work place, travel route and operation mode. The system was based on high-precision navigation technology, which enables the agricultural machinery to accurately and quickly reach the task point and work. Moreover, the NuttX was used in software design for operating the secondary development to improve the systems extended functions.
Key words: positioning; precision agriculture; unmanned; high precision
随着中国人口红利不断减少,生态环境不断恶化,农机装备的升级与改革迫在眉睫。如何实现智能农业、精准农业,提升作业效率,减少劳动力已成为农业生产的一大问题[1]。中国北方地区的部分大型合作社、农场利用其农田集中、人口密度小的特点,建立了自己的远程作业控制中心,控制中心的信息化管理人员可以利用北斗定位系统,根据作业需要对农机、机手进行统一调度,在控制中心里就可以知道每台农机的位置、状态及作业量[2]。农机手使用了哪些农机、干了多少活都可以在管理平台上随时查看,但这些产品大多都操作复杂,需要有驾驶经验的人员操控车辆[3,4]。并且不论是聘请操作人员,还是自费学习农机操作都会使农民成本急剧增大,再加上传统的卫星定位以码元宽度较大的测距码作为测量信号,导致测量精度不高(平面方向误差为 10 m,海拔误差则是平面方向误差的两倍),使得农机在南方地区丘陵、山地的分布发散、形状不规则、地貌不平整的农田进行自主智能作业的可能性变得极低,无法达到精准农业作业的要求[5]。相比传统的卫星定位以码元宽度较大的测距码作为测量信号,导致测量精度不高,无法达到精准农业作业要求,卫星高精度定位采用载波相位差分测量技术(RTK)。将卫星高精度定位技术加载至农机上,监控人员在远程作业控制中心实时查看农机工作状态及位置,并且能显著提高农机无人作业精度,避免作业重复或遗漏造成不必要的浪费。从2013年美国精准农业差分改正服务来源得知,使用个人PTK基站的农户占使用高精度GPS差分改正信息农户的22.1%。根据农业机械设计与制造大师陈学庚院士统计,农机通过搭载卫星高精度定位导航技术进行自动作业,可节省聘请播种机手薪酬支出的60%,增加机组经济收入20%~30%,每亩增加收入60~90元,土地利用率提高0.5%~1.0%,作物产量可提高2%~3%。因此,高精度无人驾驶农机在精准农业、智能农业上拥有很大的发展前景[6-15]。
本研究设计了一种高精度的无人驾驶农机系统,该系统以PixHawk飞控系统为核心,搭载传感器系统、通信系统、卫星定位系统等模块,可在远程控制中心设置农机工作地点、行进路线、作业方式等,使农机在无人驾驶的情况下通过卫星高精度定位导航技术,可精准、快速达到任务点进行工作。该操作平台选用NuttX平台,可对系统进行二次开发。
1 系统设计及定位原理
1.1 系统设计
该设计实现一辆在卫星高精度定位的基础上能在丘陵、山地这些形状不规则、地貌不平整的分散状农田实现自主智能作业的农用车。
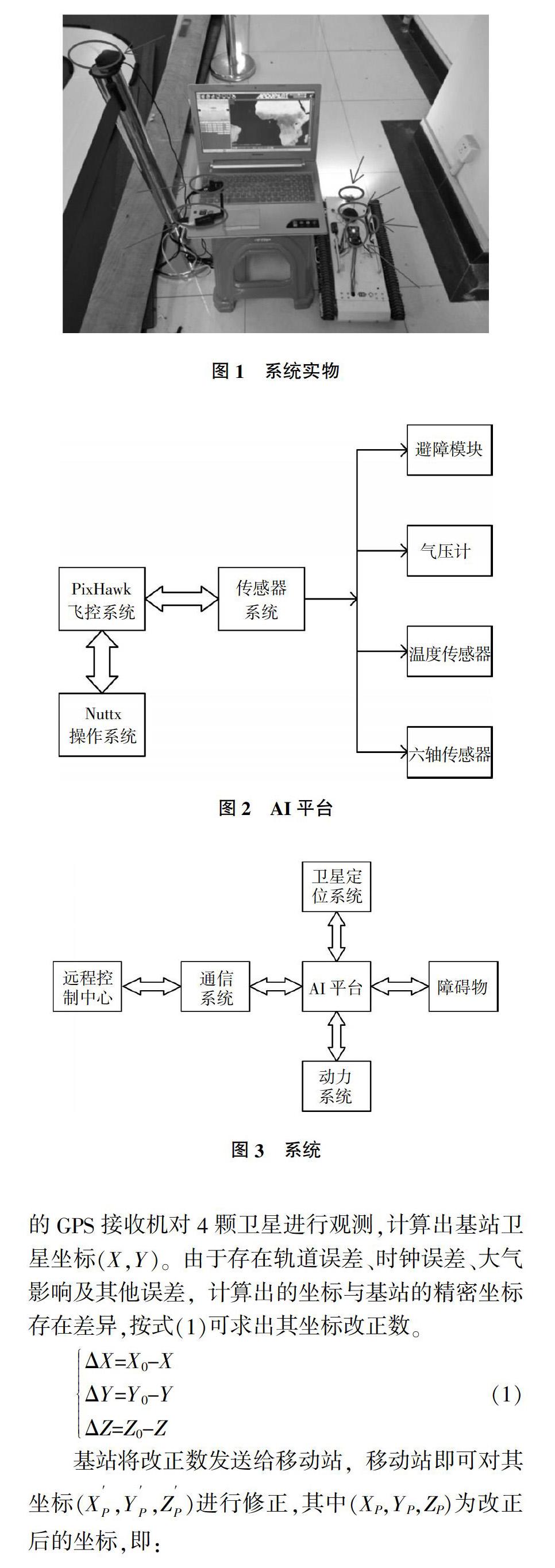
以AI平台为核心,可在农机调度中心设置农机工作地点、行进路线等功能,使农机在无人驾驶的情况下精准、快速达到任务点进行工作。AI平台由PixHawk飞控、避障模块及传感器系统构成,可探测前方障碍物,并做出避让。平台以NuttX为操作系统,可对平台上的系统进行二次开发。AI平台可通过搭载卫星定位系统以及通信系统,使车辆在无人驾驶的情况下保证其绝对安全。
PixHawk飞控系统可输出PWM波控制车辆动力系统,实现控制车辆起步、转弯、停止等功能。通信系统采用3DR数传电台,车辆接收由控制中心发送出的指令后将指令传给飞控系统,飞控系统分析其指令来控制电机驱动,从而实现人员在控制中心便可控制车辆的工作。卫星定位系统为车辆提供高精度定位,为实现车辆精准作业提供保障。系统实物如图1所示。其组成AI平台如图2所示,系統构成如图3所示。
1.2 定位原理
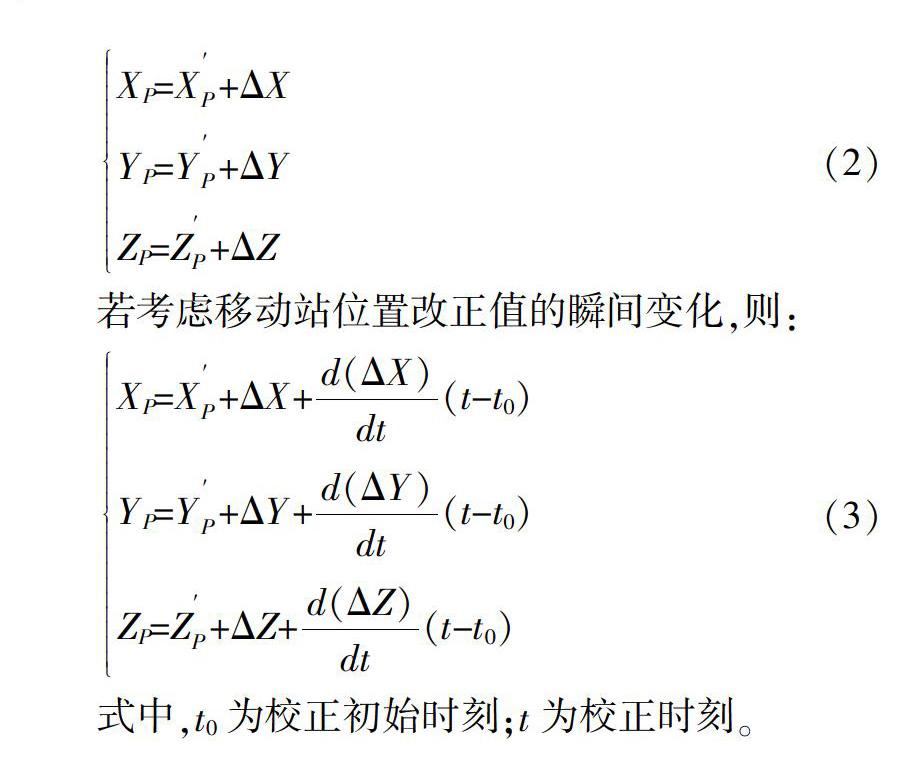
高精度卫星定位原理为基站固定在某一固定位置用以确定其精度坐标为(X0,Y0,Z0),通过基站上的GPS接收机对4颗卫星进行观测,计算出基站卫星坐标(X,Y)。由于存在轨道误差、时钟误差、大气影响及其他误差,计算出的坐标与基站的精密坐标存在差异,按式(1)可求出其坐标改正数。
ΔX=X0-XΔY=Y0-YΔZ=Z0-Z (1)
基站将改正数发送给移动站,移动站即可对其坐标(X■■,Y■■,Z■■)进行修正,其中(XP,YP,ZP)为改正后的坐标,即:
XP=X■■+ΔXYP=Y■■+ΔYZP=Z■■+ΔZ (2)
若考虑移动站位置改正值的瞬间变化,则:
XP=X■■+ΔX+■(t-t0)YP=Y■■+ΔY+■(t-t0)ZP=Z■■+ΔZ+■(t-t0) (3)
式中,t0为校正初始时刻;t为校正时刻。
2 硬件电路设计
整个电路的硬件部分可分为5个部分:卫星定位系统、PixHawk飞控系统、传感器系统、动力系统以及通信系统。
2.1 卫星定位系统
卫星定位系统由基站及移动站组成,移动站安装在作业车辆上,实时定位作业车辆,基站可固定在某一固定位置,也可跟随移动站运动。先将基站精确定位,后期基站的绝对地理精度将影响移动站的地理精度。定位系统采用实时动态技术(RTK),卫星定位系统终端能同时支持北斗、GPS、GLONASS三种定位方式的三模定位器,无论在何处都有一个模块的信号强度够强,可瞬间切换任意定位方式,可在户外实时得到厘米级定位精度。
2.2 PixHawk飞控系统
PixHawk飞控系统的总线及外设都对外引出,对实现二次开发的用户而言提供了很大的方便。PixHawk飞控系统由两个控制器组成,主控制器采用STM32F427,擅长运算处理。附加故障保护备用控制器STM32F103采用独立供电,在主处理器失效时可实现手动恢复,安全稳定。PixHawk飞控系统可输出PWM波控制车辆动力系统,实现控制车辆起步、转弯、停止等功能。
2.3 传感器系统
传感器系统与PixHawk飞控系统共同组成车辆的AI平台。传感器系统充当车辆感官系统,由避障模块、气压计、温度传感器、六轴传感器等组成。
2.3.1 避障传感器 避障传感器分类较多,如红外传感器、超声波传感器、毫米波雷达及摄像头等,都用于测量车辆与物体的接近程度、距离。考虑到红外传感器受物体的颜色、方向、周围光线影响较大,超声波传感器又存在测量盲区的问题,最终考虑选择使用测量距离远、可靠性高、不受光线、尘埃影响的毫米波雷达与分辨率高、对颜色形状感知能力强的摄像头相结合的方式来提高农机的安全性及稳定性。避障模块可通过数模转换器或I2C扩展板与PixHawk飞控系统相连。车辆行驶时毫米波雷达会通过天线向外发射毫米波,当前方有障碍物出现时,障碍物会反射毫米波信号,毫米波雷达在接收障碍物反射信号的同时,摄像头会根据所探知的物体信息进行图像识别,进而结合农机动态信息进行融合,通过AI平台进行智能处理,避让障碍物。
2.3.2 气压计 选择MEAS MS5611型气压计,利用气压计所测量的气压值来计算海拔高度,同时配合温度传感器使用可以减少所测高度误差。
2.3.3 六轴传感器 六轴传感器采用由Invensense公司生产的MPU6000传感器,由一个三轴加速度传感器和一个三轴陀螺仪传感器组成,可用来测感应车辆前后倾斜、左右倾斜、左右摇摆的全方位动态装置,能精准地确定运动物体的方位,并将其位置、姿態传送给AI平台,平台将此时的位置与系统最初设定的路线进行对比,不断调整车辆运行方向,辅助卫星导航系统进行高精度定位导航。
2.4 动力系统
动力系统由电源模块、过流保护装置、电机驱动系统等组成。电源模块为PixHawk飞控系统、传感器系统、卫星定位系统、通信系统等外围电路供电。过流保护装置由继电器构成,防止电源输出电流过大造成电源或外围元器件的损坏。
电机驱动系统由增量式旋转编码器及直流电机组成,电机安装在履带车后轮,带动车辆行进。行进过程中因为电机输出转速存在误差,而为了使车辆保持直线运动就必须对电机实现实时控制,在电机驱动系统中加载旋转编码器,与其构成一个闭环控制系统,可对电机速度实时采样,驱动根据编码器反馈的数据对电机进行一个实时的调整,从而保证车辆能保持直线运行。
2.5 通信系统
通信模块可使用实时传输的3DR455MHz数传电台,通信模块搭载功放后,通信直线距离可达 10 km以上。通信模块一端连接无人车上的AI平台,一端连接远程控制中心,可将车上的数据实时传输到电脑显示屏上,使操作人员可以实时看到车辆运行状态。
3 系统软件设置
为使系统安全稳定的工作,软件的稳定运行是不可缺少的,在此设计中主要用到两款软件,一款为基于Mavlink协议的开源虚拟地面控制软件Mission Planner,一款为瑞士科技公司u-blox旗下的u-center测试器。
3.1 u-center测试器设置
在车辆运行过程中,为了防止移动站与基站数据传输的延时导致工作失败甚至更严重的后果,就必须检测移动站与基站的数据传输是否有延时。而测试软件u-center主要是用来对卫星定位系统进行检测,它可对卫星信号的强度位置、高度、速度、航向以及卫星时间等参数进行可视化,即对使用卫星定位的车辆实现实时数据记录与播放。将移动站与u-center连接,在基站发送频率为10 Hz的情况下观察Age of DGNSS Corr参数,若参数大于0.1 s则表示移动站与基站的数据传输有一定的延时。
基站内部使用了u-blox M8P芯片,它支持多种输入输出协议,如果要设置某一特定消息以某一特定协议输出的话,可在u-center中很方便的更改,进入Messages view—UBX—CFG—MSG中,选择特定消息,如何再选择输出协议后点击send保存即可。u-center测试器对车辆实现实时数据记录与播放的操作步骤如图4所示。
3.2 Mission Planner设置
对于飞控装置,要想实现不同的功能就要加载不同的固件,而固件的加载以及车辆参数的设置都需要使用到Mission Planner。先在网上下载固件,再使用数据线将飞控板与电脑相连,选择相应的COM口,波特率选择115 200,此时不能点击右上角的“连接”图标,完成后进入初始设置中的安装固件选项,选择自定义固件,将在网上下载好的固件选中,固件便开始下载至飞控板上,下载完成后Mission Planner会提示“Upload Done”这时飞控板上就下载好固件。固件加载完成后点击Mission Planner右上角“连接”图标,进入必要硬件中的全部参数表,全部参数表相当于将飞控所有源代码以表格的方式呈现出来,可以很方便地设置飞控所有参数。基站使用Mission Planner软件搜星操作步骤如图5所示。
4 系统设置与调试
硬件连接为卫星定位系统通过连接线与PixHawk飞控系统上的uartB串口相连;传感器系统可通过数模转换器或I2C扩展板与PixHawk飞控系统相连;通信系统接收端连接PixHawk飞控系统TELEM2串口。
4.1 定位系统调试
为达到精度要求,选择使用的定位系统由基站、移动站组成,基站安装在控制中心,移动站安装在作业车辆上随作业车辆移动。为了达到5 cm定位精度,选用的三模定位导航器需要先通过软件在系统基站及移动站内烧写固件,并设置基站及移动站的通信频率,让基站可以将作业车辆的实时位置、运行轨道准确地在控制调度中心显示屏上显示出来。
烧写固件的软件u-center测试器,固件选择u-blox官方网站公布的1.40固件。将固件分别烧入基站与移动站之后设置基站与移动站的通信频率,固件默认频率为1 Hz,为了保障车辆运行安全将频率设置为10 Hz。图6为参数设置好后基站所接受的卫星信号及强度。
先将基站进行搜星,确定基站的绝对地理位置。搜星时需要使用软件Mission Planner,搜星时需到空旷处,先将基站搭建好后,打开Mission Planner进入初始设置,选择可选硬件里面的RTK\GPS Inject (图7)。将基站与电脑连接,并安装驱动后,软件会自动显示COM串口,波特率选择115 200,并在SurveyIn Acc中选择定位误差为2 m,定位时间80 s后开始搜星。搜星成功后软件会提示Position is valid,如圖8所示。此时的定位误差为基站的绝对定位误差,不影响到移动站车辆的定位误差。
图9为车辆未使用高精度定位的漂移路线。图10为车辆使用高精度定位后的漂移路线。使用了高精度定位的漂移相比于仅使用卫星定位的漂移大大减少,且在使用高精度定位时的基站也显示出来。
4.2 PixHark飞控系统及传感器的设置与调试
PixHawk飞控系统及传感器系统在此装置中作为AI平台,其设置调试显得尤为重要。
4.2.1 PixHawk飞控系统PID值的设置与调试 PID算法控制,在如今的工业领域广泛使用,PID控制中只有3个参数,即:比例(P)、积分(I)、微分(D)。
参数P的大小主要决定车辆运行过程中,车辆遇到因地貌不平,地形曲折多变等不可抗原因发生与设定路线产生偏差时,车辆抵御偏差的“力度”。若车辆工作地形地貌凹凸不平,导致偏差角度变大,则P值也相应取大,但P值过大会导致系统震荡,破坏系统稳定性,使得车辆剧烈摆动。若车辆工作地貌越平整则倾斜角度越小,P值越小,但P值过小会引起车辆平衡能力不够,当车辆运行速度过快时容易发生翻车事故。
参数I主要决定车辆在作业时对作业状态的依赖程度,如果I值设置太小,会使车辆过度依赖此时的误差,从而导致系统不会抑制“过敏”现象。如果I值设置太大,则会使车辆系统过度减少对误差的反应能力,从而造成反应迟缓,导致作业路线误差增大。
合适的参数D有助于减少超调量,使系统趋于稳定,可以有效抑制下一时刻可能发生的倾斜。如果D设置较小,车辆反应将不够灵敏,如果D设置过大也会产生“过敏”现象。D值与P值比较而言,D反映的是矫正误差的灵敏度,P值则更多表现为矫正偏差的力度。
PID的取值会严重影响到后面小车运行的稳定性,在熟悉PID参数的变化影响系统性能变化的基础上,选用试凑法对PID参数进行整定。按照先比例、后积分、再微分的操作步骤进行。先将比例系数Kp由小变大,观察系统的响应曲线。在静差不能满足设计要求的时候将积分环节加入系统,此时应先减小比例系数Kp,再将积分系数Ki逐渐增大,使系统在保持良好的动态性能的前提下,消除静差。静差消除后,若发现系统动态性能指标不够,则在PI控制器的基础上加入微分环节,构成PID控制系统。此时,将微分比例系数Kd从零增大,同时相应地改变比例系数以及积分系数,通过不断地试凑从而获得最终满意的控制效果。图11为通过试验运行后所测得的PID值。图12为在400 m环形操场测试的线路图,黄色线段为调度中心监测人员设定的作业路线,紫色路线为车辆根据设定的路线行驶的路线,车辆自主行驶的路线与设定的路线基本重合。
4.2.2 传感器的设置与调试 将传感器系统连接到电路中后,进行传感器的调试,调试中使用的软件也是开源软件Mission Planner。调试主要分为六轴传感器调试、罗盘调试、水平平面校正。点击Mission Planner必要硬件中的“加速度计校准”按钮,可选择六轴传感器调试,按照要求依次将六轴传感器进行水平放置和垂直放置,放置完成即可完成相应的加速度计调试。加速度计调试完成后还需对罗盘进行调试,将罗盘与GPS进行固定,保证二者的指向方向一致性,且在调试过程中两者的指向不能发生偏移,打开Mission Planner必要硬件中的“指南针”选择现场校,并将GPS和罗盘绕所有的轴进行圆周运动完成所有的修正数据的采集,从而完成罗盘调试。将所有传感器固定在车上,在车辆调试过程中罗盘和GPS会共同工作,将车辆指向在Mission Planner中实时显现出来。
5 小结
本研究设计了一种基于卫星高精度导航的自动无人驾驶车。远程控制端安装地面控制软件,实现控制端写入工作地点,搭载在移动车辆上的PixHawk飞控模块在卫星定位的协同工作下,将数传通信模块接收到的指令转换成PWM波控制車辆驱动模块,使得车辆在无人操控的情况下实现自主作业,工作误差达到厘米级别。车辆的行驶路线与地面控制站规划的路线基本重合。
参考文献:
[1] 朱怀汝,张新盈.北斗卫星导航系统在河南精准农业中的应用探讨[J].全球定位系统,2017,42(3):94-98.
[2] SHUJUN L. Status and trends on sci-tech development of agricultural machinery in China[J].Ama agricultural mechanization in Asia Africa & Latin America,2016,47(2):115-120.
[3] 何成龙.北斗导航系统在我国精准农业中的应用[J].卫星应用,2014(12):24-27.
[4] 张叶茂.基于模糊控制的农机自动导航控制系统研究[J].江苏农业科学,2017,45(17):241-245.
[5] 苏兴俊,刘永波.浅谈农机GPS卫星定位和自动导航驾驶系统的应用[J].农业开发与装备,2014(6):93-94.
[6] 巧爱兵.广域差分GPS用户端算法研究[D].郑州:解放军信息工程大学,2007.
[7] 张 勤,李家全等编著.GPS测量原理及应用[M].北京:科学出版社,2005.
[8] 吴才聪.美国精准农业技术应用概况及北斗农业应用思考[J].卫星应用,2015(6):14-18.
[9] 佟 林,柴宝杰,马宝英.一种无线传感器网络节点精确定位的方法[J].湖北农业科学,2013,52(12):2923-2925.
[10] LIN F,QI F. Research on the hardware structure characteristics and EKF filtering algorithm of the autopilot PIXHAWK[A].IEEE Sixth International Conference on Instrumentation & Measurement,Computer,Communication and Control[C].2016. 228-231.
[11] 胡静涛.农业机械自动导航技术研究进展[J].农业工程学报,2015(10):1-10.
[12] 郑嘉伟,刘益军,张 阳.农机导航多模变结构智能控制方法研究[D].北京:中国农业机械化科学研究院,2017.
[13] 卢涵宇,金紫阳,胡 迪.增量式编码器数据采集[J].重庆邮电学院学报(自然科学版),2006(6):107-108.
[14] 杨振东.无线数传电台实现数据可靠传输技术探析[J].中国传媒科技,2012(10):116-117.
[15] 李 俊,李运堂.四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报(自然科学版),2012(2):114-117.
