基于数字网格的飞行冲突探测与解脱
2020-06-08刘西,南英,孙旺
刘 西,南 英,孙 旺
(南京航空航天大学,江苏 南京 210016)
现阶段空中交通流量大幅增长[1],防止飞行冲突主要有三种方式:空中交通管制调配(ATC)、机载防撞(TCAS)及目视避障[2]。ATC从全局角度指挥调配飞行器,然而TCAS适用于局部冲突解脱,考虑ATC管制回路是典型的人在回路决策系统[3],严重依赖既定的管制规则和管制员的经验[4],为了解决复杂条件下的飞行冲突问题,Reich建立了航空器碰撞模型理论[5],将航空器简化为长方体;Folton利用维诺多边形的临近特性解决多机冲突探测问题[6];Anderson和Lin建立了冲突区域的交叉航路防撞模型[7];Erdmann利用无碰撞路径来防止航空器之间发生碰撞[8]。以上方法针对飞行器的中长期冲突探测,没有考虑短期探测的实时性和机动性,本文为解决多飞行器短期飞行冲突问题,提出了基于数字网格的冲突探测与解脱方法,将运动学模型离散化为决策模型,并采用空域网格坐标表示飞行器的短期可达域,保证了短期冲突探测的快速性,之后,采用动态规划方法,根据性能指标得到当前飞行冲突的最优解脱决策。该方法探测范围大于TCAS系统,且满足快速性、可靠性要求,可作为地面空管实时全局调控的最后介入手段,减轻人员负担,减少人为失误,为飞行安全提供保障。
1 数学模型及空域网格模型
1.1 空域网格模型
本文依据飞行间隔标准将空域划分成多个长方体[9],高度对应垂直方向上的安全间隔[10],由于不确定飞行方向,空域长宽按照同航迹最小安全距离取值,如图1所示。
图中,L1,L2,L3表示安全距离,由此各飞行器位置可由网格坐标表示,任意两架飞行器满足下式即可保证飞行无冲突。

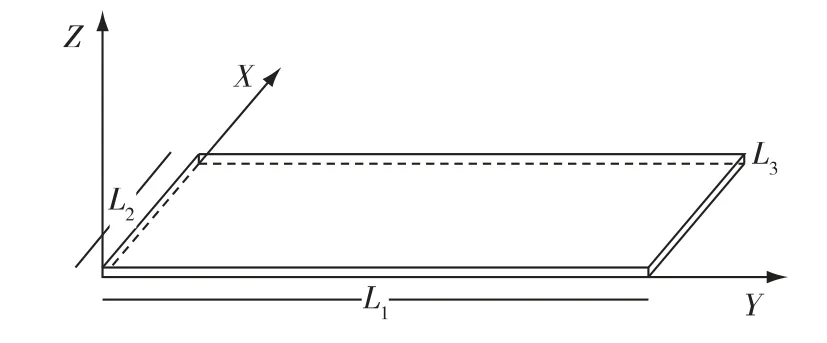
图1 单元空域网格示意图
式中,X,Y,Z分别表示飞行器的网格坐标,下标表示飞行器编号,由式(1)可知,安全飞行至少保证间隔一个单元格,该条件下最小距离为L1,L2,L3,最大距离为3L1,3L2,3L3,该模型在牺牲部分空域的情形下保证多飞行器飞行的安全性及冲突探测解脱的快速性。
1.2 飞行器模型
结合民航飞行和ATC特点,对模型进行简化:
1)飞行器速度保持不变;
2)飞行器的位置及速度方向信息可由地面雷达管制[11]获取;
3)飞行器可用过载限制在一定范围内;
4)飞行器机动方式有限。
由以上条件,其运动规律满足下式。

式中,V表示速度,θ 表示速度倾角,ψ 表示速度偏航角,ny,nz表示可用过载,x,y,z表示飞行器的位置坐标。考虑飞行适航性及安全性,其各项约束表示如下

由于θ 角满足上式约束,存在n1∈nz,n2∈ny,使得式(2)中的n1-cosθ 及始终为常值,因此速度倾角及偏航角变化率可重新定义为

式中,npz,npy为常值,根据式(3)其取值范围由不等式的边界值计算可得
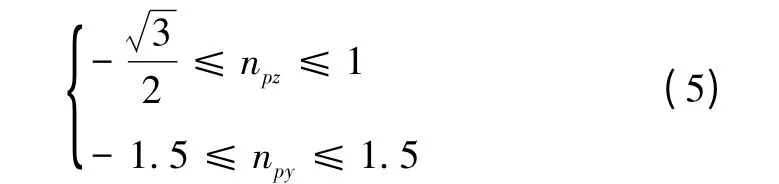
在上式限定的范围内,确定不同的过载常值npy=±0.3,0,n=±0.5,0共同组成飞行器的机动策略,此时共有9种机动方式,其覆盖的范围即为飞行器在保证适航性的可达区域。
2 冲突探测与解脱算法
2.1 冲突探测
短期飞行冲突表示未来几秒至几分钟内发生的冲突[12],机载TCAS系统可提前20 s提供机动决策[13],在双方应答机异常情况下或未达到系统工作范围时,空管可通过飞行器位置速度信息参与多飞行器的短期冲突探测与解脱过程[14]。
定义短期飞行冲突探测时间为

式中,n∈N表示预测步长,飞行器速度确定,d为尾流影响的距离,最大预测时间T应大于TCAS系统的20 s,nmax=6的可达域示意图如图2所示。
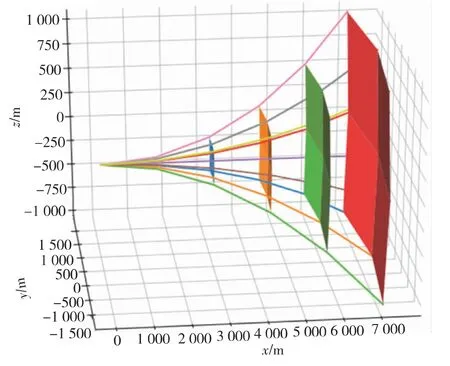
图2 时飞行器短期可达区域示意图
对于管制区的m架飞行器,传统的两两探测不再适用多飞行器短期飞行冲突,比较次数为

本文将节点位置坐标转换为网格坐标,其转换参照式(8)。
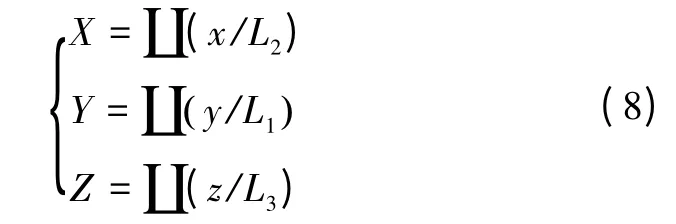
X,Y,Z为节点网格坐标,对空域内所有网格进行数值标注,设置非禁飞区网格的初始值N=0,禁飞区网格初始值N=1,对可达域进行如下操作。

根据安全要求,标注范围包括可达域内部及相邻边界,表示如下

式中,Aset(t)表示t时刻的节点网格坐标集合,Xe,Ye,Ze为节点网格坐标,closer表示可达域边界网格坐标集合,inner表示内部集合。根据上式,单一飞行器的数值标注截面如图3所示。

图3 单一飞行器无冲突数值标注截面示意图
图3中2为可达域,1为边界。多飞行器产生冲突时,冲突位置的截面数值标注分别如图4所示。
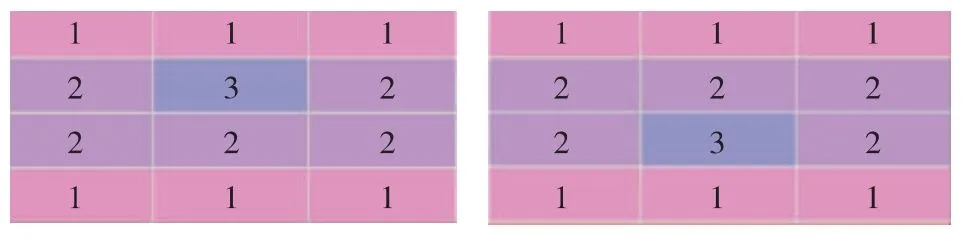
图4 多飞行器冲突数值标注截面示意图
图4中标注值大于2为异常值,若该值对应的坐标是节点网格坐标,该异常值坐标表示冲突位置,否则,可能是由多个飞行器的邻域边界1组合而成,无实际意义。不同时到达异常值即可保证飞行安全。
飞行器的短期冲突探测基本流程图如图5所示。
根据图5流程,可以得到飞行冲突的网格节点Obstacle,对于m架飞行器的短期飞行冲突,其计算复杂度为

图5 多飞行器飞行冲突探测流程图

式中,复杂度主要由P产生,其与最大时间T,机动策略ny,nz的选择有关。其复杂程度与飞行器数量呈线性增长,远远小于式(7)的指数增长,求和计算的复杂度也远小于计算相对距离。
传统的冲突探测针对中长期飞行冲突且只基于规则库进行解脱,在飞行器数量较多的情况下,无法保证解脱的有效性,通过数字网格方法大大降低短期飞行冲突的探测复杂度,同时为冲突解脱提供可靠的依据和保障。
2.2 冲突消解
冲突探测得到的Obstacle主要包括:冲突节点网格坐标Xe,Ye,Ze,各飞行器到达该网格的机动策略。对于多飞行器的复杂冲突,首先分析冲突的节点网格坐标的关系,参考式(1)对各个节点网格坐标进行比较,确定互相发生冲突的节点网格坐标,并将其归为同一类冲突,同时,获得飞行器的编号及采取的机动方式。在满足动力学、速度倾角约束的条件下,将冲突解脱转化为策略的选择过程,通过规划方法合理选择各飞行器的机动决策使得总性能指标最大。冲突节点网格的判别方式参照流程如图6所示。

图6 多飞行器飞行冲突匹配及动作输出
图中,Connect为同类冲突集合,表示互相导致的冲突集合。集合元素对应飞行器编号F与到达冲突位置的决策号O,其判别为式(1),采用遍历的方法到互相冲突的(F1O1,F2O2)组合,飞行器不同时执行该组合中的机动策略则不会发生冲突。因此,对于所有(F1O1,F2O2)组合,至少否定其中一种决策进行组合可形成动作a,所有a组合成不会产生冲突的动作集合action,其表示如下

在得到不会产生冲突的动作集合后,设置飞行器的初始状态,即所有决策

上述初始状态在action的作用下会发生改变,si表示飞行器i的可执行策略集合,同时,考虑飞行器的性能约束,该飞行器可执行策略进一步受到限制,即当速度倾角过大(过小),则不应采取向上(向下)机动的策略,状态转移过程可以表示为


FO表示第F个飞行器的第O个决策号所对应的动作策略,即该飞行器不能采取的机动方式。
飞行器性能约束的作用形式为

式中,ΔθAi表示采取策略Ai后速度倾角的变化,θt表示当前飞行器的速度倾角,上式可限定飞行器采取的策略满足自身的性能要求。
根据状态转移过程(16)不断更新下一个预测时刻的各个飞行器的状态,最终迭代得到ST,此时,任意两个飞行器的可执行策略集合已经满足安全要求式(1)。设计优化性能指标

式中,ST表示最大预测时刻的飞行器可执行策略集合,由式(15)的状态转移确定,式(19)中K表示各个飞行器在当前可执行策略下的性能指标,其具体表示为

即距离目标点的距离,t由下式决定

式中,Δt为预测的时间间隔,step表示更新步长。由式(19)(20)(21)可以得到最终各个飞行器的解脱决策。

通过求使性能指标J最小的S,结合式(20)可得到距离目标点最近的决策(A0…Am),F表示飞行器,各飞行器在此决策的基础上进行位置速度方向的更新,最终到达目标点。
以上冲突解脱结合动态规划方法,算法复杂性主要体现在利用探测的障碍信息组成互斥的飞行器及障碍物编号组合,并根据这些组合迭代得到最终可行策略。通过多重遍历组合可大大降低组合的维数,减少迭代次数,同时动态规划可排除迭代过程中大量不合理的状态,因此,涉及多飞行器时,不会出现指数爆炸的情况,可以快速、有效应对多飞行器的飞行冲突。
3 仿真验证
为验证冲突探测与解脱算法的有效性,设定L1=L2=5 000 m,L3=300 m。设计环境范围120 000 m,尾流安全距离d=1 500 m,速度V=280 m/s,此时预测范围7 500 m满足要求,仿真更新步长过大会导致飞行器反应过快无法解脱,过小会显著增加计算复杂度,本文设置step=2,设置飞行器数量为5,以验证算法针对多飞行器的快速性,5个飞行器起点终点设计满足如下格式:
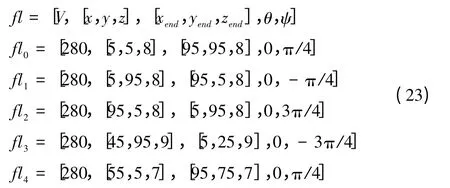
其中位置坐标均以km为单位,根据计算可以得到飞行器在仿真开始后的第22.5 s,根据飞行步长即第20个仿真周期,飞行器012到达冲突点发生碰撞,同时设置网格坐标[3,10,30-20]为禁飞区,飞行器3遇到该禁飞区,为验证算法对多飞行器的快速性,增加飞行器4。采用本文的冲突探测与解脱算法后,其飞行轨迹如图7所示。
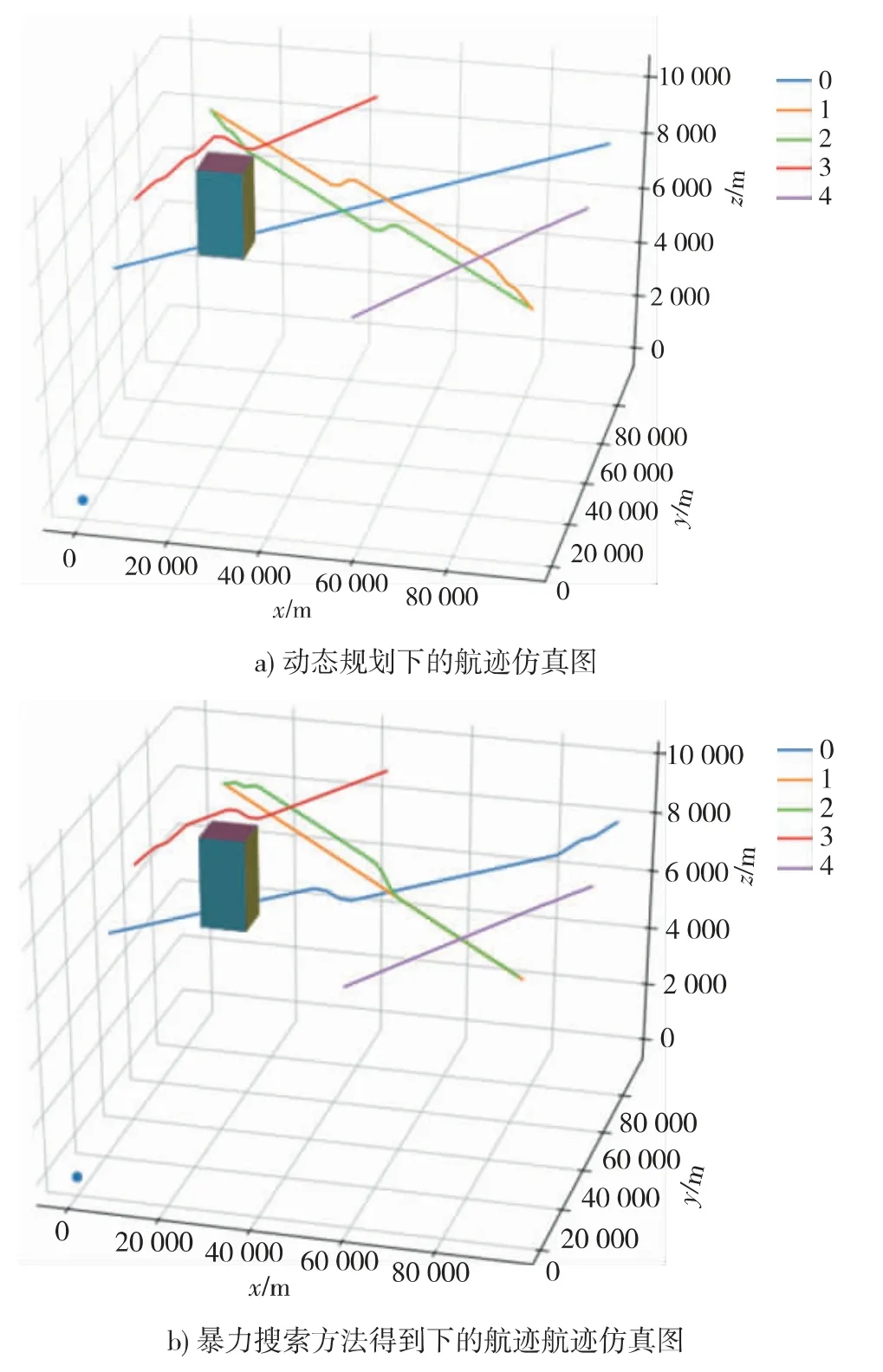
图7 飞行器0-5号的三维航迹仿真图
可见采用两种不同的方法都可以保证飞行器之间、飞行器与禁飞区满足安全间隔要求,不同方法飞行器机动方式不同,性能指标相同,由于安全距离与机动能力的设定,所有避障都是从高度出发进行回避,XY平面机动无法满足安全要求。飞行器3有效避开了禁飞区,最终达到目标点,单独研究飞行器012所在网格间距差值和与最大间距如图8所示。

图8 飞行器0、1、2号之间的网格距离仿真图
图8中主要展示整个仿真过程的0、1、2号飞行器网格距离最大值,从初始参数设置知第20个仿真周期将发生碰撞,图中可以看出,任意两架飞行器在预测碰撞的第20步满足安全式(1),即满足飞行安全间隔要求,其真实轨迹的距离如图9所示。
图9 飞行器0、1、2号之间的真实距离仿真图
图9中飞行器1和2的x,y坐标在第20步时趋于相同,即存在发生冲突的情况,其z方向在第20步保证了安全距离,以上仿真验证了该算法对冲突探测与解脱的有效性,在机动过程中飞行器的速度方向角如图10所示。
由图10知,飞行器的速度倾角满足约束条件。为保证冲突探测解脱的实时性,两种方法的整个飞行冲突探测与解脱的时间花费如图11所示。

图10 飞行器0、1、2号速度方向仿真图

图11 多飞行器全过程探测解脱时间仿真图
图11中飞行器在第7、18周期探测到飞行冲突,其探测时间在Python3.6平台下整体较短,不超过0.3 s,在探测到冲突后,暴力搜索法解脱过程时间整体较长,不满足实时要求,而动态规划方法时间较短,在其他计算平台能保证一定的实时性。参照图7a),在第7周期,本算例飞行器4与2,1与3由于探测距离及高度范围,可以探测到飞行冲突,但保持当前的飞行状态并不会发生冲突,暴力搜索法遍历四个飞行器的组合情况耗费大量时间,动态规划法则有效利用探测到的冲突位置,快速得到解脱决策。第18周期,三架飞行器的可达区完全重合,飞行器无法全部保持原有的飞行状态,可达区域重合较多,解脱策略较多,动态规划方法解脱时间大于第7周期花费时间,但依旧远远小于暴力搜索法花费时间。空管系统可依靠本算法有效解决多飞行器短期飞行冲突,为空管员提供一定的决策辅助。
4 结术语
本文提出了基于数字网格的飞行冲突探测与解脱方法,该方法可提升空管系统的自动化性能,主要优点:1)探测空域范围内多飞行器可能出现的复杂冲突,并实时给出最优决策;2)探测范围大于飞行器TCAS系统的建议决策范围,辅助空管员进行全局指挥;3)有效解决TCAS系统故障或不可靠情况下的飞行冲突问题,增加地面管控介入的手段。本文的冲突探测与解脱基于空域数字网格模型,同时结合动态规划方法,得到各飞行器所有不冲突的机动状态组合,最终由性能指标得到满足实时要求的最优冲突解脱决策,并仿真验证了算法的快速性和可靠性。
