考虑声兼容影响的悬浮式深弹布放模型
2020-06-08康春玉
寇 祝,任 磊,康春玉
(海军大连舰艇学院,辽宁 大连 116018)
作为舰用鱼雷防御硬武器,悬浮式深弹可与悬浮式声诱饵综合使用,实现对来袭鱼雷的软硬对抗,共同提高水面舰艇面对水下威胁的生存能力[1-2]。但是,当软硬武器布放位置过近时,相互之间可能产生声兼容影响,在这种影响下悬浮式深弹将无法正常工作[3]。因此,倘若先发射声诱饵,那么对于后发射的悬浮式深弹就必须考虑声兼容影响。这种情况下如何建立悬浮式深弹的布放模型便是本文所要研究和解决的问题。
1 作战过程概述
如图1所示,假设水面舰艇从鱼雷报警时刻开始转向,经过系统反应时间于W1点先发射声诱饵,并将计算的声诱饵空中飞行时间和布放位置发送给悬浮式深弹的火控设备,火控设备根据接收的目标信息和声诱饵布放参数制定悬浮式深弹的布放方案,并在声诱饵入水后于W2点发射悬浮式深弹。
为了避免软硬武器之间产生声兼容影响,最直接的办法就是确保各枚悬浮式深弹和声诱饵之间具有足够的间隔距离。这里将最小的“足够间隔距离”叫做安全距离,用Rsafe表示。安全距离的确定主要考虑声诱饵在噪声工作方式下所产生的与悬浮式深弹检测鱼雷相同工作频段的噪声。该噪声在海水中传播损失至悬浮式深弹检测阈值以下的距离。安全距离的具体数值可以按水声球面扩展传播损失的公式计算得到,也可以由试验获得[4]。
2 拦雷布放策略分析
2.1 布放约束条件
从以上作战过程可知,在先发射声诱饵的情况下,后发射的悬浮式深弹其布放位置必须满足以下约束条件:一是各枚悬浮式深弹必须布放在其射程范围之内和安全距离圆之外。安全距离圆即以先发射的声诱饵布放位置PB为圆心,以安全距离Rsafe为半径的圆;二是悬浮式深弹布放可行区域与来袭鱼雷的可能航行区域存在交集;三是悬浮式深弹开始工作前,鱼雷未穿越其布放位置,且悬浮式深弹结束工作之前,鱼雷可能到达其布放位置。
2.2 拦雷布放策略
悬浮式深弹的拦雷策略根据两点原则制定:一是尽可能覆盖来袭鱼雷的可能航向范围;二是实现对来袭鱼雷的尽早拦截[5]。考虑各枚悬浮式深弹布放实现的难易程度,一般将多枚悬浮式深弹布放在同一条直线上,构成一条线段。先确定线段的两个端点位置,再根据悬浮式深弹的使用数量确定各枚悬浮式深弹的布放位置[6]。线段的两个端点即悬浮式深弹的布放基准点,用P1和P2表示。显然,这两个布放基准点在满足布放约束条件的前提下,应尽可能分别选择在鱼雷航向范围的两条边界上,且尽可能靠近来袭鱼雷。由于鱼雷报警距离范围近端鱼雷航向线必须与悬浮式深弹的最大射程圆相交,所以,近端布放基准点P1在近端鱼雷航向线上选择;而远端布放基准点P2则需根据远端鱼雷航向线、悬浮式深弹的最大射程圆以及安全距离圆的相对位置关系进行选择,具体分为以下两种情况。
如图2所示,当远端鱼雷航向线与最大射程圆相交且交点不都位于安全距离圆之内时,远端布放基准点P2可在远端鱼雷航向线上选择。由于此时线段P1P2必然覆盖来袭鱼雷的可能航向范围,所以,根据布放策略P1、P2应尽可能靠近来袭鱼雷,以实现对来袭鱼雷的尽早拦截。
如图3a)所示,当远端鱼雷航向线与最大射程圆不相交;或如图3b)所示远端鱼雷航向线与最大射程圆相交但交点都位于安全距离圆之内时,远端布放基准点P2可在最大射程圆上以近端鱼雷航向线为分界,靠近远端鱼雷航向线的圆弧JK上选择。此时线段P1P2不一定能够覆盖来袭鱼雷的可能航向范围,所以布放基准点P1、P2的选择应该首先遵循“尽可能覆盖来袭鱼雷航向范围”,确定布放基准点P2,以提高其拦截概率;然后再以“尽可能靠近来袭鱼雷的方向”为原则确定布放基准点P1,实现对来袭鱼雷的尽早拦截。

图2 布放基准点P2 在远端鱼雷航向线上选择的情况

图3 远端鱼雷布放基准点在最大射程圆上选择的情况
3 拦雷布放数学模型
3.1 约束条件的数学模型
1)悬浮式深弹能否布放的判断模型
如图4所示,根据布放约束条件可知,悬浮式深弹能够布放首先必须满足报警距离最近端鱼雷航向线与悬浮式深弹最大射程圆相交,即发射悬浮式深弹的位置到最近端鱼雷航向线的距离小于其最大射程[7]。假设T1点坐标为(XT1,YT1),则鱼雷报警距离范围的最近端鱼雷航向线所在直线方程为

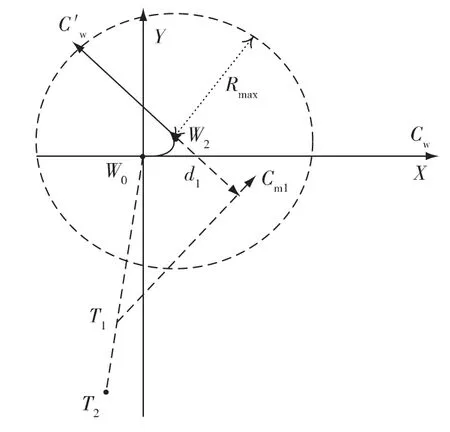
图4 悬浮式深弹能否布放判断示意图
根据点到直线的距离公式,得到水面舰艇发射悬浮式深弹的位置W2到鱼雷报警距离范围最近端航向线的距离为

则悬浮式深弹布放必须满足式(4)。

2)悬浮式深弹布放位置约束数学模型
根据拦雷策略,确定悬浮式深弹布放位置的关键是确定布放基准点,所以,对各枚悬浮式深弹布放位置约束条件应转换为对布放基准点的约束条件。
假设布放基准点P1和P2的坐标分别为)和),水面舰艇发射悬浮式深弹的位置W2的坐标为),声诱饵的布放位置PB的坐标为,)。根据布放约束条件可知,各枚悬浮式深弹必须布放在其最大射程圆内,同时位于其最小射程圆和安全距离圆之外,如图5所示。对于布放在其最大射程圆之内而言,只需要保证两个布放基准点的武器发射距离和均小于武器的最大射程[8],即满足式(5)即可。

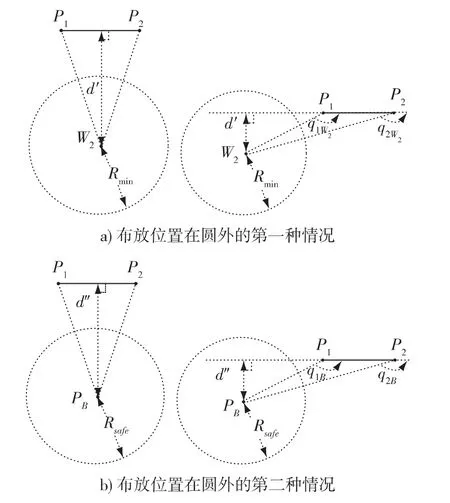
图5 悬浮式深弹在最小射程圆和安全距离圆外示意图
对于布放在武器的最小射程圆和安全距离圆之外而言,首先需要保证两个布放基准点的武器发射距离均大于武器的最小射程[9],同时两个布放基准点与声诱饵的距离均大于软硬武器的安全距离Rsafe,即满足式(6)和式(7)。

除此之外,为了确保布放基准点之间的各枚悬浮式深弹都满足位于最小射程圆和安全距离圆之外的条件,还必须考虑以下两种情况。
第一种情况如图5a)所示,即舰艇发射悬浮式深弹的位置W2和声诱饵的布放位置PB分别到布放基准点P1、P2所在直线的距离大于武器的最小射程和软硬武器之间的安全距离。布放基准点P1、P2所在直线的方程可以表示为

同理,舰艇发射悬浮式深弹的位置和声诱饵的布放位置分别到布放基准点P1、P2所在直线的距离d' 和d″由式(10)和式(11)计算得到。
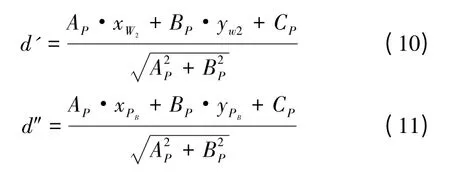
此时只需要满足d' ≥Rmin和d″≥Rsafe即可。
第二种情况如图5b)所示,在舰艇发射悬浮式深弹的位置和声诱饵的布放位置分别与布放基准点P1、P2的连线与构成的夹角均为钝角,其大小分别为q1、q2及q3、q4。记直线P1P2,W2P1,W2P2和PBP1,PBP2的斜率分别为,其值可由P1、P2及W2、PB点的坐标计算得到。根据两条直线的夹角公式可得此种情况下的约束条件如式(12)和式(13)所示。

由于布放基准点P1、P2为所布放悬浮式深弹线段的两端点,所以布放约束条件的第三、四点即针对布放基准点P1、P2。假设布放基准点P1为拦截鱼雷报警距离范围最近端鱼雷的悬浮式深弹布放位置,布放基准点P2为拦截鱼雷报警距离范围最远端鱼雷的悬浮式深弹布放位置,则鱼雷分别沿最近端和最远端航向线从鱼雷报警的近、远端位置T1、T2航行至P1、P2点的时间可由式(14)和式(15)计算得到:
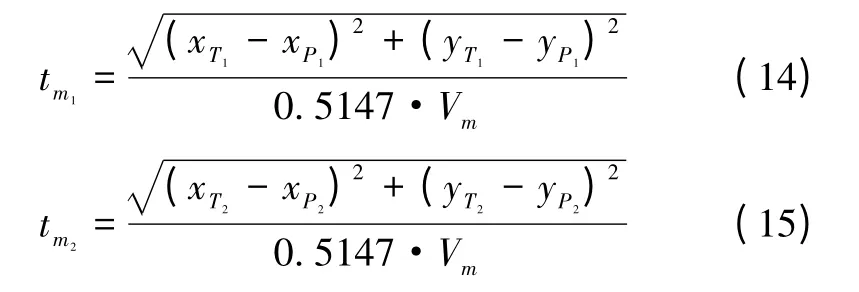
式中,Vm为鱼雷航速,单位为kn。
根据武器飞行时间和射程的对应关系以及布放基准点P1、P2的发射距离,即可求出悬浮式深弹在空中飞行至P1、P2的时间。那么,根据布放约束条件的第三、四点,布放基准点必须满足式(16)和式(17)。

综上所述,悬浮式深弹布放基准点P1,P2的约束条件可以由式(18)或式(19)表示,且两式为并集关系。

3.2 目标函数数学模型
假设T2点的坐标为),则鱼雷报警距离范围的最远端鱼雷航向线所在直线的方程可表示为

其中,
根据点到直线的距离公式得到水面舰艇发射悬浮式深弹的位置W2到鱼雷报警距离范围最远端航向线的距离为

若d2>Rmax,则远端鱼雷航向线与最大射程圆不相交;若d2≤Rmax,则远端鱼雷航向线与最大射程圆相交。这样按照远端布放基准点P2的选择范围不同,确定布放基准点P1和P2的目标函数可以分为两种情况。
1)布放基准点P2在远端鱼雷航向线上选择时其目标函数为

2)布放基准点P2在最大射程圆上选择时目标函数为

根据式(24)所表示的目标函数,可以求出“尽可能覆盖来袭鱼雷航向范围”的布放基准点P1和P2,然后将确定的布放基准点P1的坐标代入式(23)作为确定布放基准点P1的目标函数。
4 实例分析及结论
按照以上布放模型利用Matlab,采用复合形优化算法进行编程计算[10],并绘制图7、图8和图9,各图中T1,T2分别为报警距离范围远、近端鱼雷位置,过T1,T2的两条射线分别为远、近端鱼雷航向线;PB为声诱饵布放位置,以PB为圆心的圆即为安全距离圆;W0,W2分别为水面舰艇鱼雷报警的位置和发射悬浮式深弹的位置,以W2为圆心的大、小两个圆分别为悬浮式深弹的最大射程圆和最小射程圆。计算初始条件为:来袭鱼雷为声自导鱼雷,舰艇初始航向90°,水文条件良好,安全距离圆的半径为600 m。
计算实例1:鱼雷报警舷角50°,远端鱼雷航向线与悬浮式深弹的最大射程圆相交,计算结果如图6所示。
计算实例2:鱼雷报警舷角140°,远端鱼雷航向线与悬浮式深弹的最大射程圆不相交,计算结果如图7所示。

图6 计算实例1

图7 计算实例2
计算实例3:鱼雷报警舷角140°,远端鱼雷航向线与悬浮式深弹的最大射程圆相交,但是交点均位于安全距离圆内,计算结果如图8所示。

图8 计算实例3
