月球风化层钻取采样过程密实度分类研究
2020-06-08郑燕红邓湘金庞勇金晟毅姚猛赵志晖
郑燕红,邓湘金,庞勇,金晟毅,姚猛,赵志晖
1. 北京空间飞行器总体设计部,北京 100094
2. 北京卫星制造厂,北京 100094
中国月球探测按照“绕、落、回”三步走战略规划,正在开展第三步“回”的研制工作,将发射嫦娥五号探测器实施无人采样返回任务[1-2],通过钻取采样获取月球风化层月壤样品是任务的重要环节之一。早在20世纪70年代,钻取采样在Apollo任务、Luna任务中就作为一种重要的采样方式获取了大量月球样品[3-5]。随着月球南极成为月球探测新的热点,美国、俄罗斯新发布的深空探测器计划[6-7],均将月球采样作为重返月球的重要标志之一,钻取采样必将发挥重要作用。
钻取采样的对象是月球风化层的月壤,不同于地球土壤,其不受空气、流动水、微生物等因素影响,大多数位置的岩土特性处于较为稳定状态,然而由于小天体撞击等影响,月壤密实度在不同位置、不同深度则呈现较大差异。月壤密实度尤其是钻进过程中的在线密实状态,是钻取采样策略制定的重要依据。目前月壤密实度信息仍主要以离线方式获得,测定途径主要利用月壤样品最大最小密度、宇航员脚印、月球车轨迹、月面漂砾轨迹、月壤耐穿透性等。这类测量结果可为钻取采样产品研制提供边界,但对月球地质构造的不可预知性、不同采样位置的随机性反映不足,Luna 16、Apollo 15任务实施过程中,均出现过密实月壤卡滞钻杆的情况[8]。因此更快捷地获取钻取采样过程中的月壤密实度状态对钻取工作的顺利进行具有重要意义。文献[9] 综合考虑月壤、岩石情况,分析了钻进扭矩、钻压力的时域与频域特征,利用支持向量机(Support Vector Mechine,SVM)方法实现了高准确率的可钻性等级辨识,但可钻性对差异较小的风化层月壤刻画略有不足。文献[10]通过加速度计或振动仪测量钻取采样机构在多个方向的频率响应,通过神经网络自主分析钻取采样机构健康状态,在地面试验中取得了较好的效果,但其关注点主要集中在机构上,在对象状态分析方面偏少。
本文针对月球风化层无人自动钻取采样过程,通过合理配置轻小型月壤状态感知传感器,获取月壤状态瞬时信息,构造一类适用于月壤密实度分类的门控型循环神经网络(GRU),对长度可变的信息序列进行自主分类识别,通过地面试验数据建立分类模型,并验证其泛化能力,为月壤原位特性分析与在轨钻进策略制定提供技术支持。
1 钻取采样过程
月球钻取采样可分为硬管取芯与软管取芯2种方式,软管取芯方式可同步完成月壤钻进与样品收纳,并可保持风化层月壤的层序信息,相对于硬管取芯其具有质量轻、易回收等优点,有利于无人自动月球采样返回任务的实施[11]。钻取采样获取样品是通过机构与月壤的相互作用,使局部月壤与相邻区域月壤发生分离的过程。采样机构对原位月壤施加纵向下压力、横向切削力[12],对可能存在的硬物质提供冲击破碎力,对软管取芯还提供一定的软管保持力,通常包含加载机构、钻进机构、提芯机构,如图1所示。加载机构利用电机卷绕绳系带动钻进机构以一定的速度向下运动提供加载力;钻进机构通过电机驱动钻杆以一定转速或冲击频率对风化层月壤进行回转或冲击破碎,提供切削力和冲击力;提芯机构通过拉绳与内嵌软管连接,提供软管保持力,确保软管可用容积不断增加,降低月壤进入阻力。
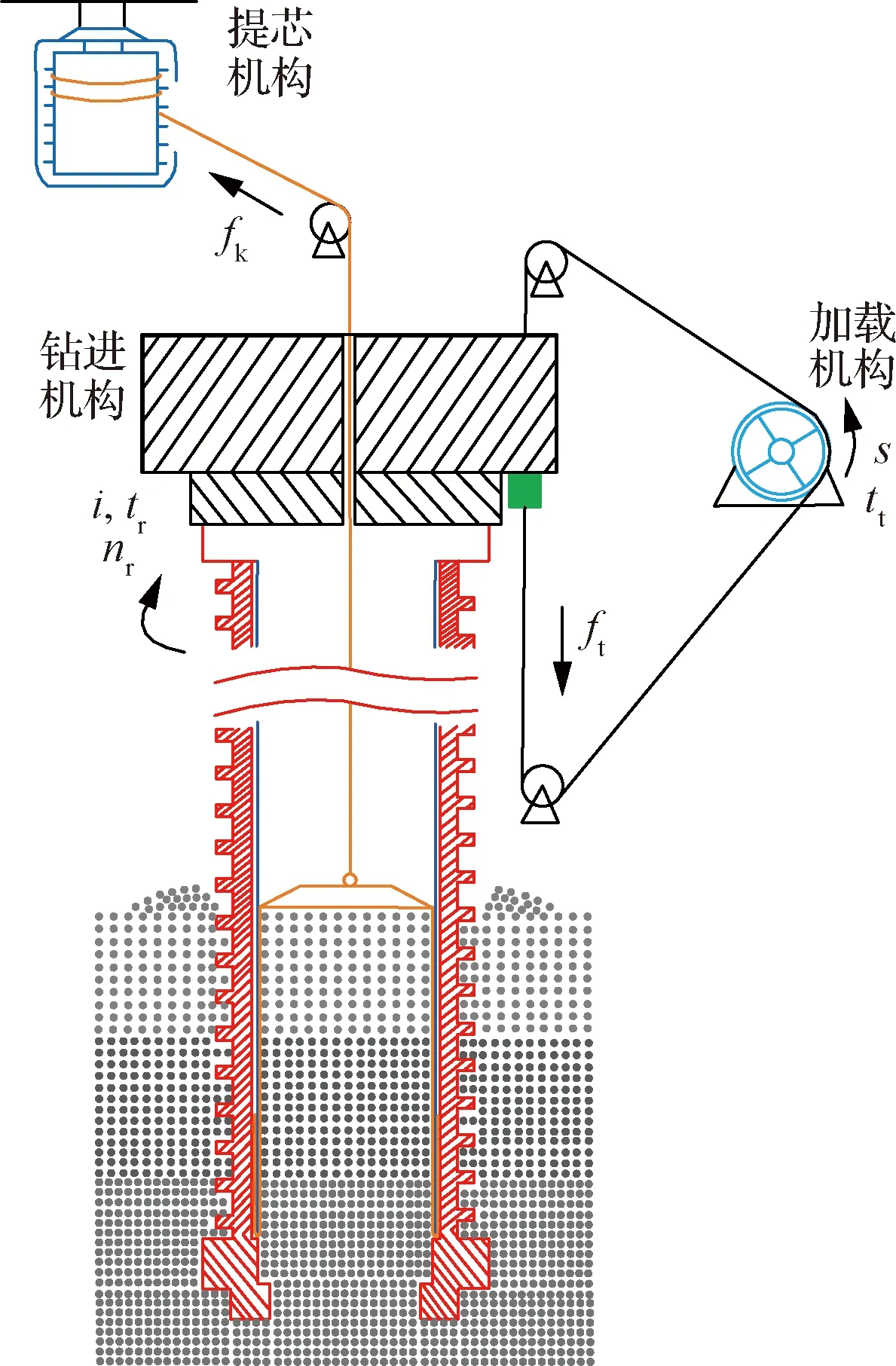
图1 钻取采样机构示意图
月球风化层钻取采样对象是具有一定深度剖面的月壤,由不同的层构成,各层月壤的粒径分布、密实度等存在随机性,层与层沿纵向变化的不连续性,采样作用对原位月壤引入的扰动性,导致螺旋钻杆在各层的负载变得不确定[13-14],对钻进机构、加载机构工作策略适应性带来了挑战。对采样机构而言,不同月壤状态将导致机构作用力、力矩、速度、温度发生变化,因此可设置相应的传感器对这类状态信号进行获取,从而感知风化层月壤状态信息。从图1可见,钻取采样纵向运动的钻进速度v(可通过位移s差分)、加载力ft可通过加载机构进行控制,径向运动的回转转速nr、回转扭矩(与电流i成正比)可通过钻进机构进行控制,同时提芯拉绳的提拉力fk可对芯管收纳月壤的阻力进行感知,而加载机构、钻进机构的电机随着工作时间、负载的变化,其工作温度tt、tr也随之变化。因此对加载机构可配置位移、力、温度传感器分别对钻进速度、加载力、加载电机温度变化情况进行测量;对钻进机构配置速度、电流、温度传感器对回转转速、回转扭矩、回转电机温度变化情况进行测量;对提芯机构配置力传感器对提供的提芯力进行测量。
如图2所示,在钻取采样过程中,通过上述传感器获取的反映风化层月壤状态的瞬时信息x,可表示为
(1)
以一定时间段内的瞬时信息构成序列输入,通过有效的状态感知方法,生成表征局部月壤特性的输出信息c,为钻取采样策略生成与控制提供依据信息,形成器上自主或天地协同回路。
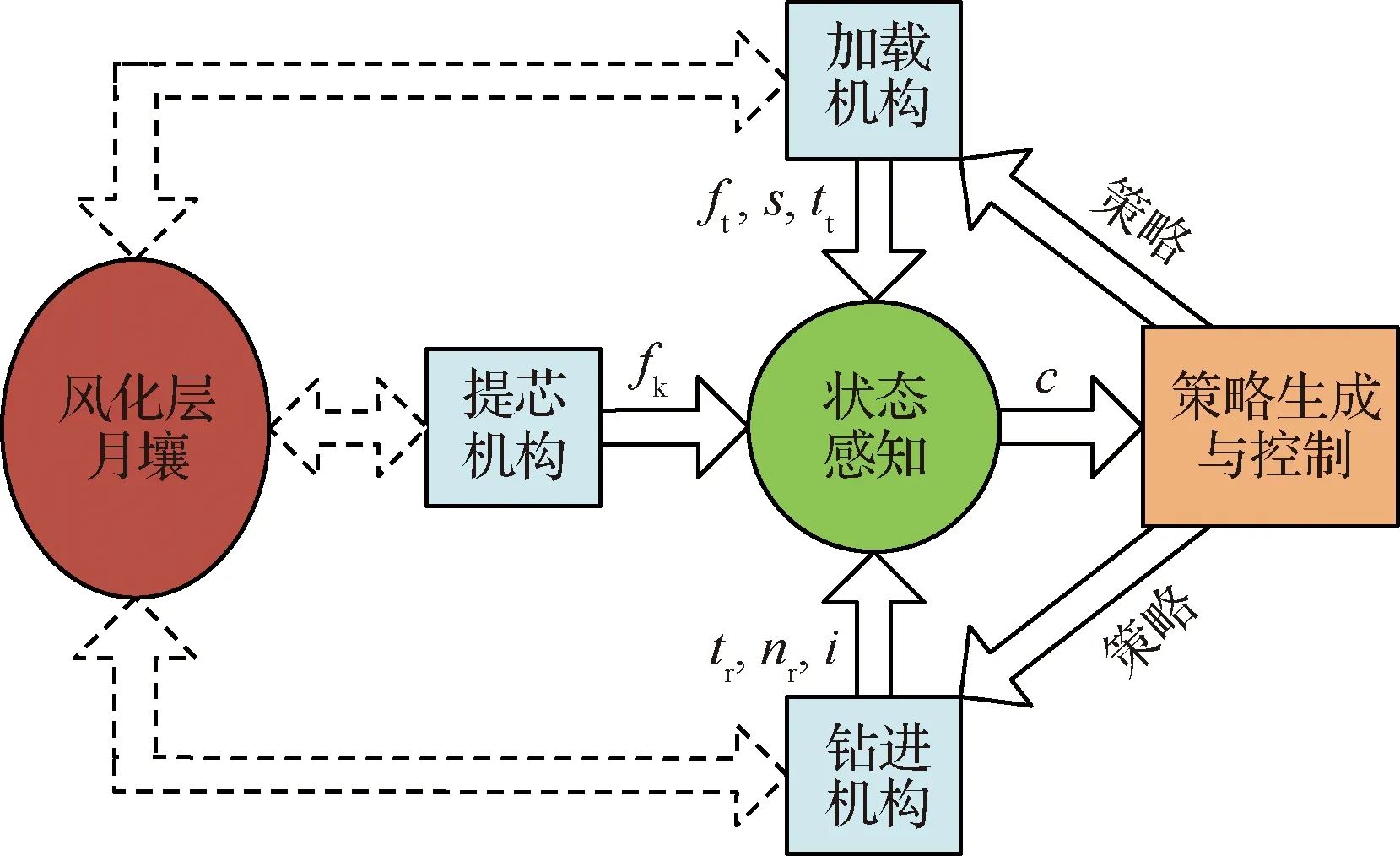
图2 钻取采样月壤状态感知示意图
2 月壤密实度
根据第1节的描述,钻取采样过程是在加载机构、钻进机构、提芯机构的作用下,通过剪切破碎使局部区域月壤发生原位分离的过程,局部区域月壤的抗剪性是影响钻具与月壤相互作用的重要因素,而风化层月壤的抗剪性与月壤密实度正相关,因此钻取采样过程中风化层月壤密实度可作为状态感知的特征输出。密实度是反映颗粒土壤聚集情况的重要参数,对于颗粒型土壤,密实度dr的表达式为
(2)
式中:ρmax、ρmin分别为最大、最小密度;ρ为当前状态密度。根据密实度定义,风化层月壤可根据密实程度分为5类[15],如表1所示。

表1 月壤密实度分类
Apollo任务证实,月壤与地球土壤的密实度存在较大差异,对浅层月壤密实度最佳估计表明,月表15 cm以内的月壤密实度约65%,当深度超过30 cm时密实度将急剧上升至92%左右[8]。因此,月球风化层钻取采样过程中的月壤密实度主要集中在中密、密实与极密范围内。
月球探测器采用的钻取采样机构往往具有较为严格的重量约束,仅能通过轻小型传感器获取力、位移、转速、电流、温度等状态量,难以配置复杂的传感器直接获取表征月壤状态的瞬时密实度。另一方面,钻取采样控制系统为确保系统的鲁棒性,通常具有较好的扰动抑制能力[16],过于精细的月壤密实度信息将增大控制系统设计难度。因此,采用既具有一定区分度,又具有一定容忍度的月壤密实度刻画可与后端策略生成与控制形成良好的匹配。
中国探月工程实施过程中,对模拟月壤进行了广泛的研究[17-18],采样模拟月壤与月面软着陆、月面巡视探测研究的模拟月壤有所不同,其对月壤密实度的关注度更高。其从物质成份、颗粒形态、颗粒密度、水份含量等方面进行基础原料控制,按照一定的粒径级配进行混杂,通过控制如图3所示振动台的振动量级、振动时间获取所需的模拟月壤当前状态密度ρ,从而根据式(2)制备不同密实程度的模拟月壤分层,然后将各个分层进行拼接组成具有一定深度的钻取采样模拟月壤。利用该方法,在地面试验过程中可制备中密、密实、极密3类不同密实度状态的模拟月壤,开展大量的钻取采样试验验证,试验装置如图4所示,获取各传感器的特征数据,建立传感器状态量与模拟月壤密实度的感知模型。
钻取采样在轨实施过程中,可利用获取的感知模型,完成风化层月壤密实度的分类预测,为在轨钻进策略制定提供支持。
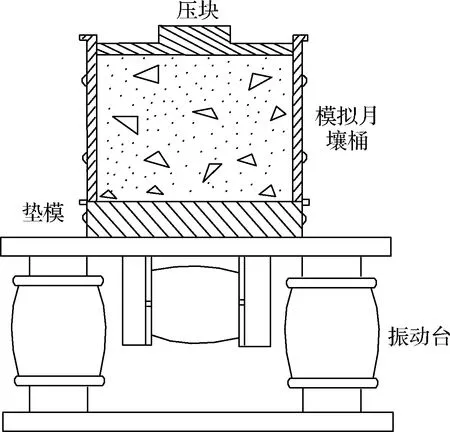
图3 模拟月壤制备示意图

图4 钻取采样试验装置
3 感知分类
由于采集到的各传感器数据为基于时间的序列信息,门控型循环神经网络对该类数据处理具有广泛的应用,并取得了良好的效果[19-22]。针对风化层月壤钻取采样过程,设计如图5所示密实度分类网络。

图5 月壤密实度分类网络
月球风化层钻取采样过程中,探测器以一定的时间间隔下传传感器数据,每帧下传数据可作为一个时间步数据x(k)∈Rp×1(k=1,2,…,n),其中p为传感器特征数据维数。设用于密实度分类的数据序列长度为n,可围绕标称值上下波动,每个时间步单元Tk具有相同的门控结构,重置门、更新门输出取值范围为0~1,具有门控特性,重置门输出r(k)决定前一时间步信息量h(k-1)的遗忘因子,更新门输出z(k)决定传递至后一时间步的信息量h(k)的组合因子。门控单元Tk可描述为
(3)
式中:g(k)为组合信息;ur(k)、uz(k)、ug(k)为净输入。设门控单元内部维数为q,则g(k)、r(k)、z(k)、h(k)、h(k-1)∈Rq×1,权值矩阵Wrh、Wzh、Wgrh∈Rq×q,Wrx、Wzx、Wgx∈Rq×p,偏置矩阵br、bz、bg∈Rq×1。门控单元采用了sigmoid和双曲正切激活函数:
(4)
风化层月壤钻取采样过程中的传感器数据序列经门控单元循环处理,不断提取数据特征,为区分月壤的密实度情况,以最后一个门控单元输出h(n)为输入,通过全连接层与Softmax层对当前钻进月壤密实度进行分类。设Softmax层输出为c类,全连接层神经元数量为m,则其数学描述为
(5)
式中:WFc∈Rm×q、Ws∈Rc×m为权值矩阵,BFc∈Rm×1、Bs∈Rc×1为偏置矩阵,ZFc∈Rm×1为全连接层加权输入,YFc∈Rm×1、Ys∈Rc×1分别为全连接层、Softmax层输出。全连接层、Softmax层激活函数描述为
(6)
为建立传感器特征数据与月壤密实度的映射关系,选取如式(7)所示交叉熵函数为目标函数L,进行监督学习。
(7)
式中:d为训练样本目标输出;o为输出类别序号;λ为L2正则系数;W*表示各层权值矩阵;i,j表示其元素序号。根据反向传播原理[23-24],目标函数对Softmax层、全连接层权值偏导数为
(8)
式中:输出偏差e=Ys-d;relu′(·)为relu函数导函数。同理可得目标函数对偏置矩阵的偏导数为
(9)
随着误差信号反向传播至各时间步单元,可得其权值梯度和偏置梯度分别为
(10)
(11)
(12)
式中:δh(k)为目标函数对各隐层输出h(k)的偏导。
为实现各层、各门控单元的权值、偏置迭代更新,对获取的传感器数据分小批量训练,每一批进行一次权值及偏置更新,即
(13)
式中:θ*表示各权值或偏置;b为样本批号;N为每批样本量;l为样本序号;η为学习率。
训练过程中,对目标函数及样本分类正确率进行交叉验证,建立月球风化层密实度分类模型;预测过程中,利用获得的模型权值及偏置进行正向计算,实现月球风化层钻取采样过程密实度快速感知分类。
4 验证与分析
为验证密实度感知分类算法的正确性,以不同密实状态模拟月壤钻取采样试验数据基础,将获取的传感器数据分为2组(对应的密实度状态已知),第1组用于网络的训练与验证,获取分类算法映射参数(权值及偏置),第2组数据用于分类预测,确认密实度分类算法的泛化能力。
考虑到月壤粒径级配存在一定波动,钻取采样试验中采用的颗粒直径在0~41 mm范围内,形状为棱角状或次棱角状,按照如图6所示的4种粒径级配方案进行制备,其中小于1 mm颗粒占主导地位,最小占比不少于60%,大于10 mm颗粒最大占比不超过8.7%,大于20 mm颗粒最大占比不超过6.3%,制备过程中各种粒径颗粒摆放位置未进行特殊设计,采用了随机排布方式。结合中密、密实及极密状态相对密实度要求,利用图3所示振动台获得了如表2所示的7种模拟月壤,通过如图4所示钻取采样过程试验,获取分类算法验证所需的2组数据。

图6 模拟月壤粒径分布

表2 钻取采样过程使用的模拟月壤状态
如图7所示选取模拟月壤Ⅰ-C-1、Ⅰ-D-1、Ⅲ-C-1、Ⅲ-B-1、Ⅱ-A-1、Ⅱ-B-1 (图中从上至下按此顺序)试验中获取的传感器数据为第1组。图中Ⅱ-B-1、Ⅲ-B-1转速、温度、电流存在短暂下落是由于临时停机所致。从图7(c)和图7(d)可见,钻杆未与模拟月壤接触时,回转电机停止、加载电机运动,此时为无月壤状态,当钻杆与模拟月壤接触后,两电机均运动,此时为月壤负载状态,因此将网络分类c设置为无月壤、中密、密实、极密4类。训练前,将第1组数据分别按序列长度n∈[25,40]、n∈[22,44]进行随机分割,结合已知密实度状态,分别生成训练数据与验证数据。从图7可见,钻取采样过程中根据钻进状态对回转速度、钻进速度进行了适应性调整(不作调整可能发生卡钻或样品量下降),加载力、提芯力等随之变化,同时不同粒径颗粒在空间分布的随机性也对部分传感器数据带来了影响,因此,依靠单个传感器数据、多传感器单帧数据都难以对密实度状态进行正确地识别。
根据前述网络结构,设置门控单元内神经元数量为100,全连接层神经元为40,学习率η=0.01,正则系数λ=0.000 5。根据式(3)、式(5)、式(8)、式(10)、式(11)进行正反向传播,并按式(13)进行网络更新,每5次训练迭代状态如图8所示。

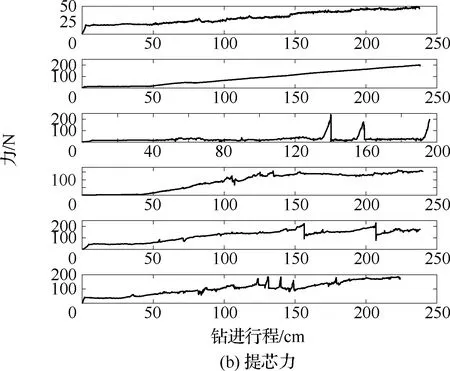
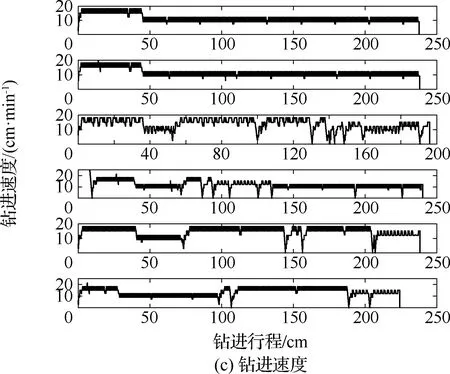


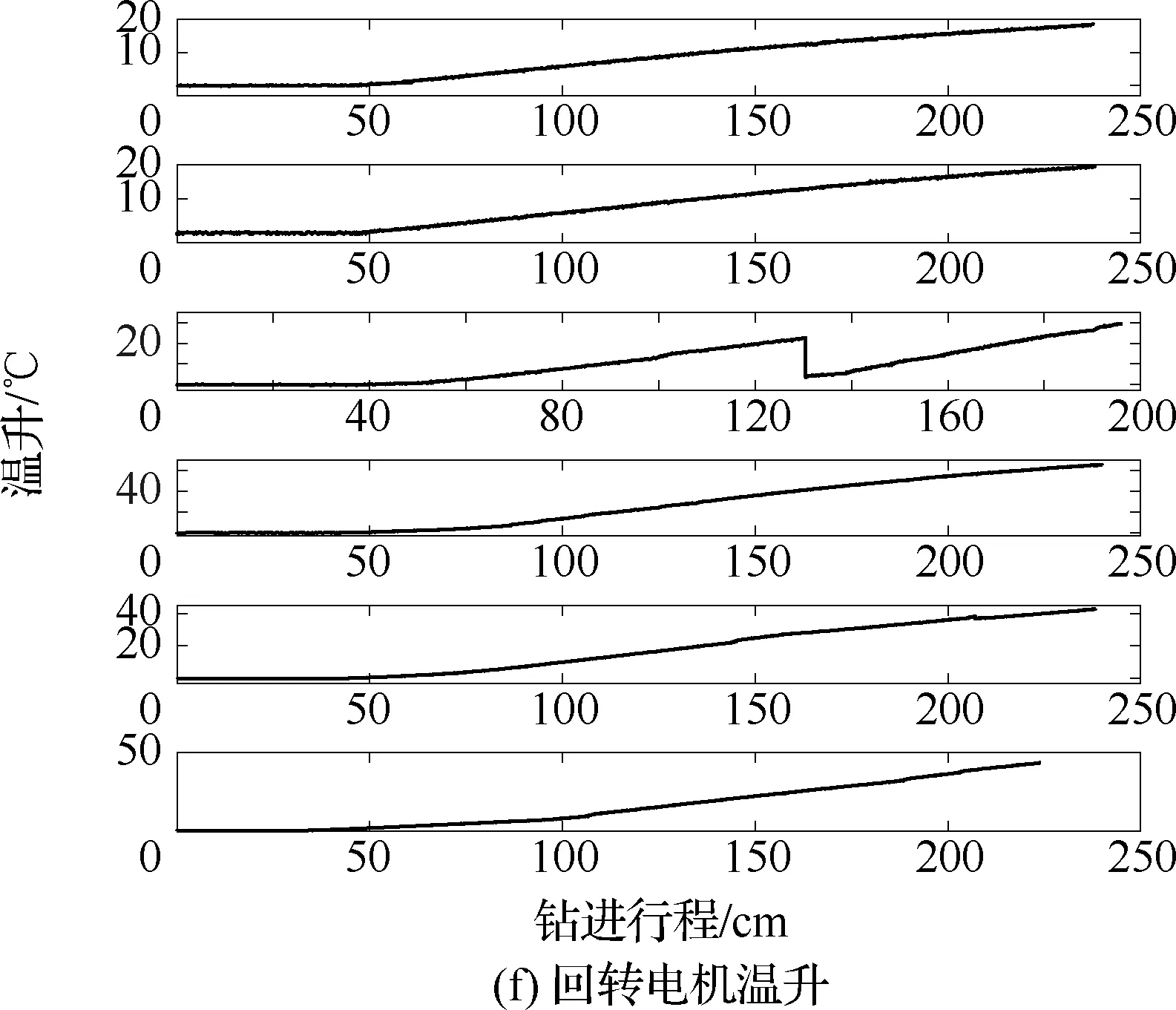
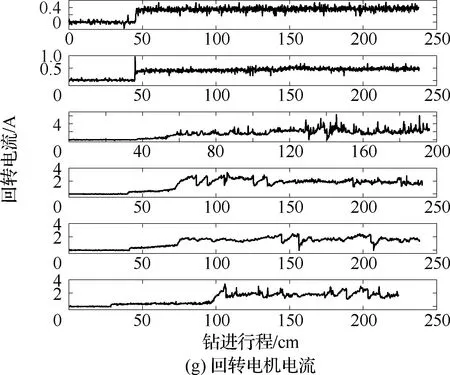
图7 第1组传感器数据
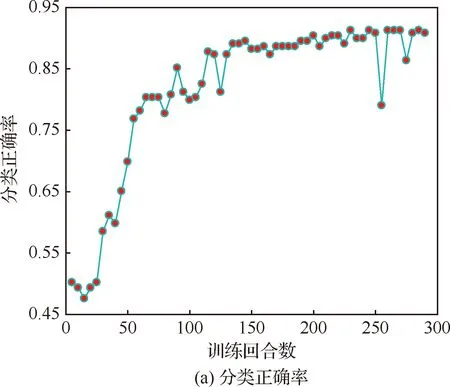

图8 训练过程变化曲线
从图8(b)整体来看,目标函数值逐步下降,经285次迭代后趋于稳态,对验证数据的分类正确率为91.27%。整个网络36 604个训练参数数量较多,利用图9进行图示,各层权值、偏置范围见图中标注。
为确认密实度分类算法的泛化能力,选取未参与训练的模拟月壤Ⅰ-B-1、Ⅱ-A-2、Ⅱ-B-2、Ⅲ-B-2(图10中中从上至下按此顺序)试验中的传感器数据为第2组,其输入序列长度先后按照n∈[22,27]、[28,33]、[34,38]、 [39,44]进行随机分割,结合已知密实度状态,生成预测数据。
对各预测数据序列进行归一化处理后,利用如图9所示映射参数,进行密实度状态分类,通过与真实模拟月壤状态进行比对,其预测正确率不低于89.36%,详细结果如表3所示。

图9 网络参数训练结果

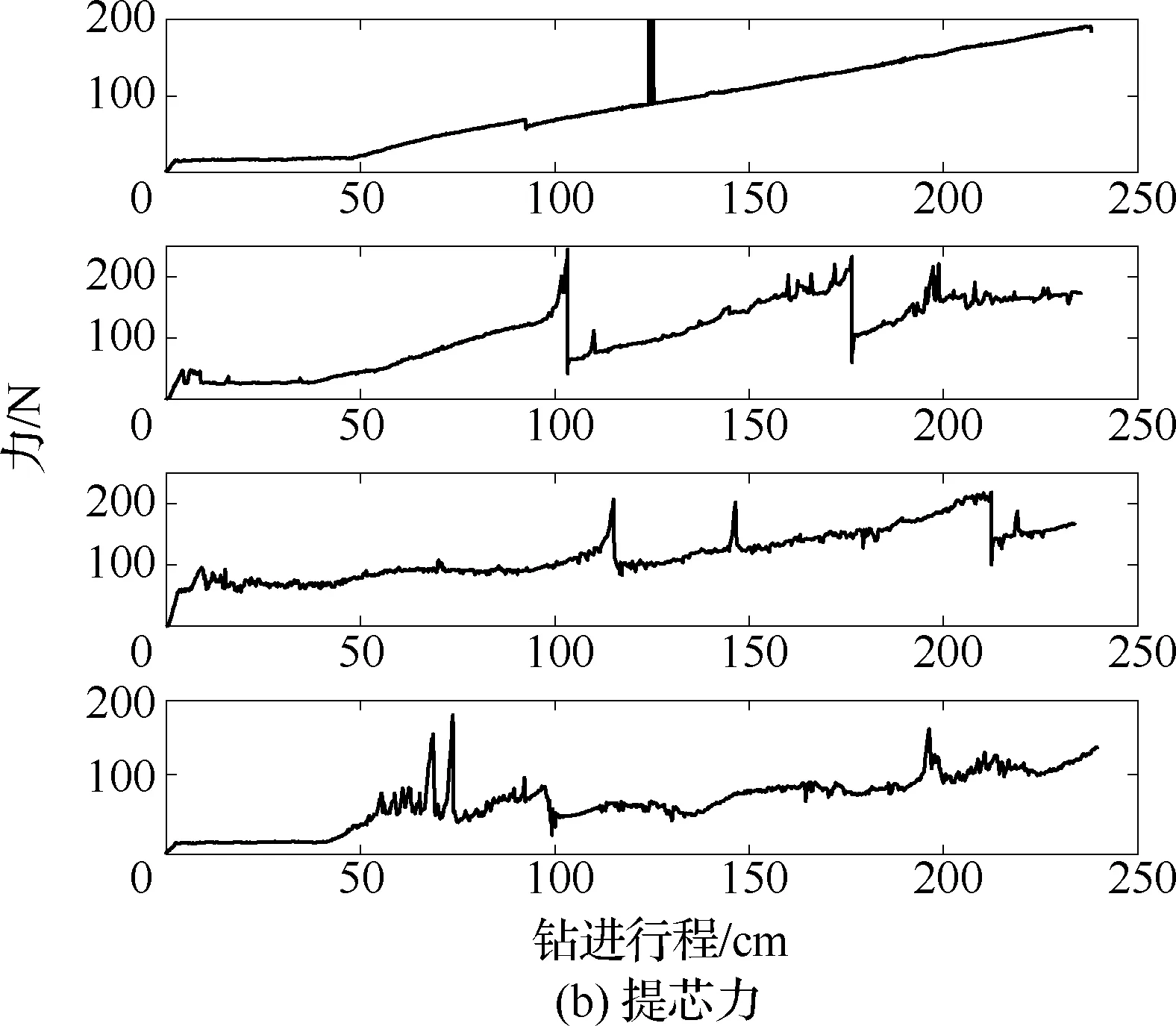

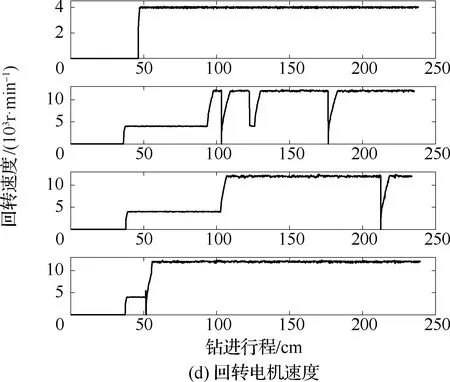
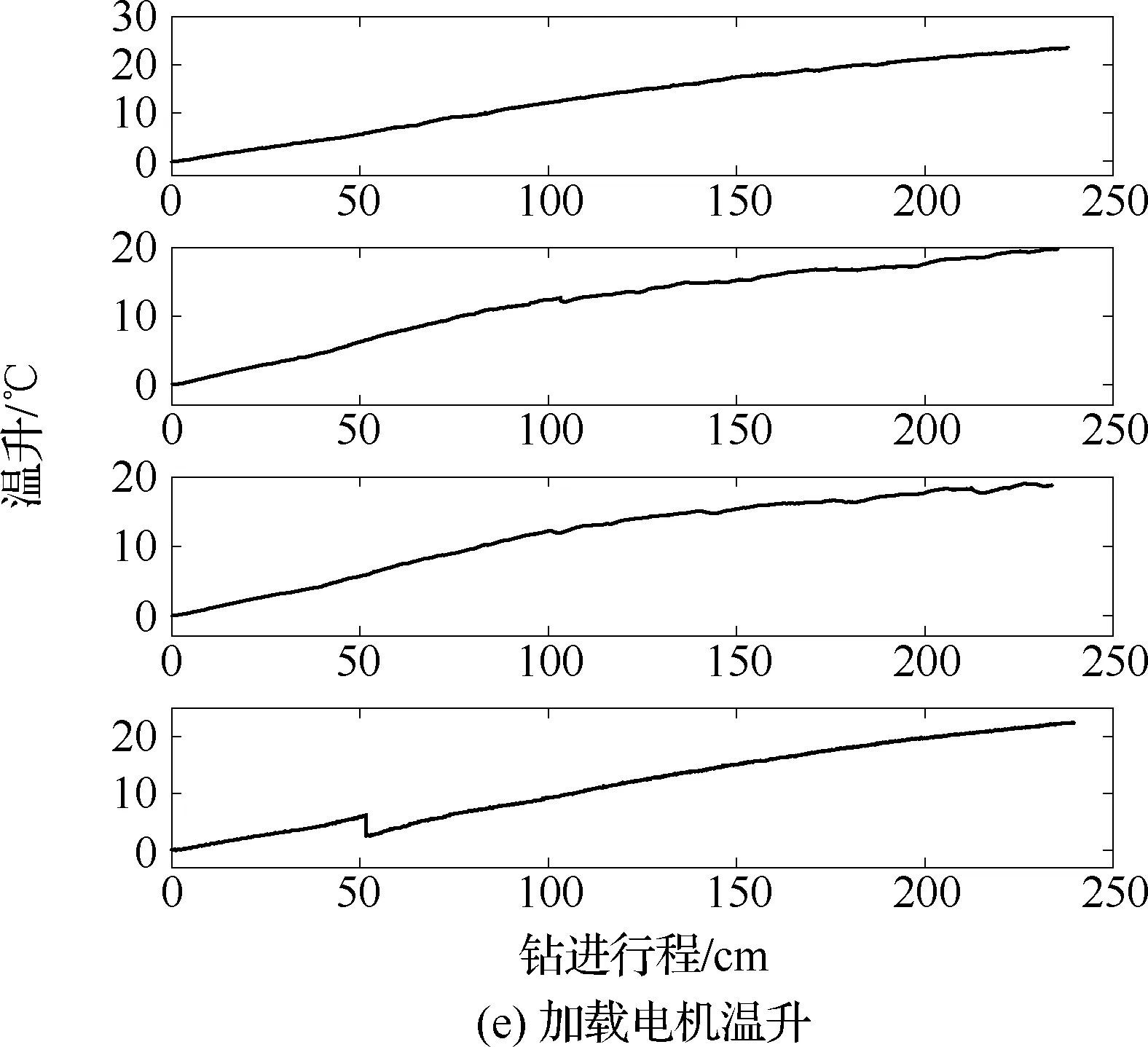
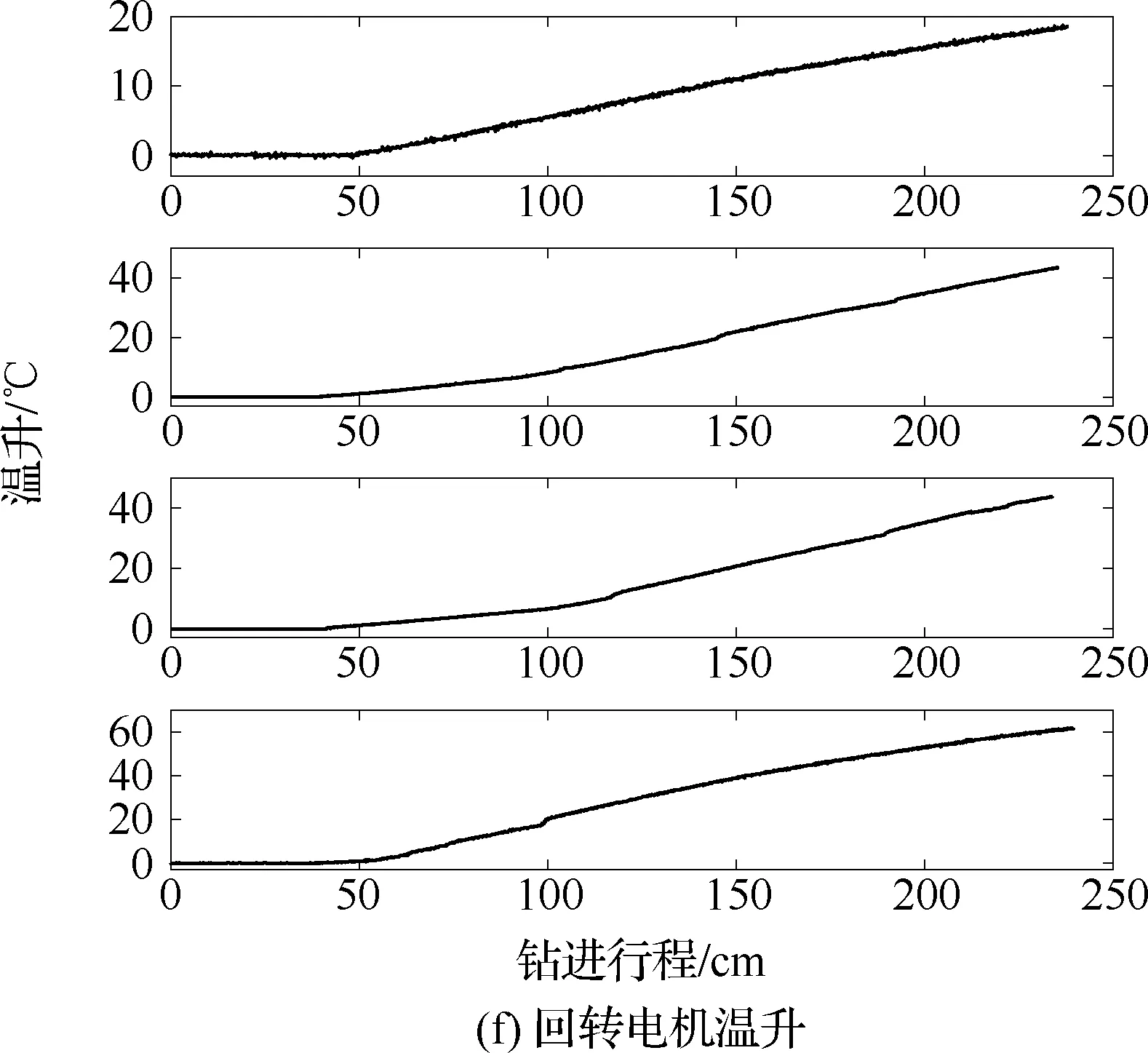

图10 第2组传感器数据曲线

表3 第2组数据预测结果
从表3可见,密实度分类算法对不同状态下的密实度状态,具有较好的泛化能力。结合图6、表2及钻进初始的空行程运动可知,训练过程中验证数据包含了4种粒径级配,预测过程中测试数据包含了2种粒径级配,网络对训练数据、预测数据的总密实度分类正确率优于90%,验证数据、测试数据对应的7种模拟月壤,通过对典型粒径、密实度交叉组合,有效降低了粒径级配对网络提取密实度状态特征的影响。随着钻取采样过程中传感器特征数据随遥测不断下传,试验过程中以一定时间间隔(代替序列长度)组织各时间步输入,利用密实度分类算法实现小滞后密实度状态感知,最小时间间隔约为22 s(试验中遥测下传时间间隔为1 s),平均时间间隔约为33 s,可为工作策略的维持或调整提供依据。
5 结 论
1) 提出了钻取采样机构传感器特征数据感知月球风化层月壤状态方法,实现钻取采样数据信息对就位月壤密实度的感知,并支持钻取采样过程自主策略调整。
2) 构建了一类适用于月球风化层月壤密实度感知分类的深度神经网络,推导了其正、反向传播关系,可适应于变长度的传感器特征数据序列。
3) 利用不同状态的模拟月壤开展钻取采样试验,获取了传感器特征数据与模拟月壤密实度间的感知分类模型,对钻取采样过程中未知传感器数据序列,密实度感知分类正确率大于89.36%,平均感知滞后时间约为33 s(遥测下传时间间隔为1 s),具有较好的泛化能力和原位特性在线识别能力。
4) 月球风化层密实度是重要的原位特性,该方法对密实度所处范围具有较好的区分度,后续可结合钻取采样机构工作特性、模拟月壤颗粒分布随机性,进行更为精细的密实度刻画与反演研究。