基于虚拟现实的工业机器人自动贴膜生产线控制设计
2020-06-07张侃王莉莉
张侃 王莉莉
摘要:现代工业的快速发展为智能设备或自动化产线的研发既带来了机遇又带来了挑战。降低研发成本,缩短研发周期,成为企业研发攻关的目标。高职教育为企业培养复合型人才,同样也面临着实验设备短缺、设备调试高风险等问题。而虚拟仿真技术成为解决以上问题的关键。本文以工业机器人自动贴膜生产线为控制对象,通过虚拟现实技术结合仿真平台构建产线3D虚拟环境,并开发虚拟模型动作,完成仿真平台与实体PLC的通讯,最终实现产线“虚实结合”的控制,为工业设备以及实验教学设备的研发提供了参考。
关键词:虚拟现实;仿真平台;虚实结合;PLC;控制设计
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2020)35-0194-02
开放科学(资源服务)标识码(OSID):
随着“中国制造2025”“互联网e+”概念的相继提出,现代工业发展日新月异。智能设备、自动化产线更是更新换代频繁,如何降低设备研发成本,缩短研发周期成为企业生存的关键。虚拟仿真技术能够按照真实设备建立1:1设备虚拟数字模型,模拟设备真实的生产环境和控制过程,因此能帮助研发人员及时发现控制问题,尽早完成可行性方案设计。本文以工业机器人自动贴膜生产线为研究对象,借助虚拟仿真平台,结合工业机器人技术、PLC控制技术等,尝试完成虚实结合的设计,为设备研发提供可行性方案。
1研究内容
本项目借助于Solidworks、机电一体化Virtual Universe Pro仿真平台、博途编程软件以及robotstudio仿真软件等,结合虚拟现实技术,实现在虚拟的环境下模拟控制工业机器人手机贴膜生产线的全过程。主要内容为:
(1) 使用Solidworks进行贴膜生产线零部件的建模及装配,将3D模型导入 Vup 仿真平台;
(2) 使用Vup仿真平台,添加虚拟操控台,添加零部件动作,配置虚拟输入输出信号,设置动作关联。添加Vup虚拟控制器,通过编程实现“虚对虚”控制;
(3) 搭建PLC部分实体硬件控制电路;
(4) 运行博途软件进行硬件组态和通讯配置,西门子PLC1200与VUP通信,完成软件编程并下载至PLC,按下实体启动按钮,实现“实对虚”控制。
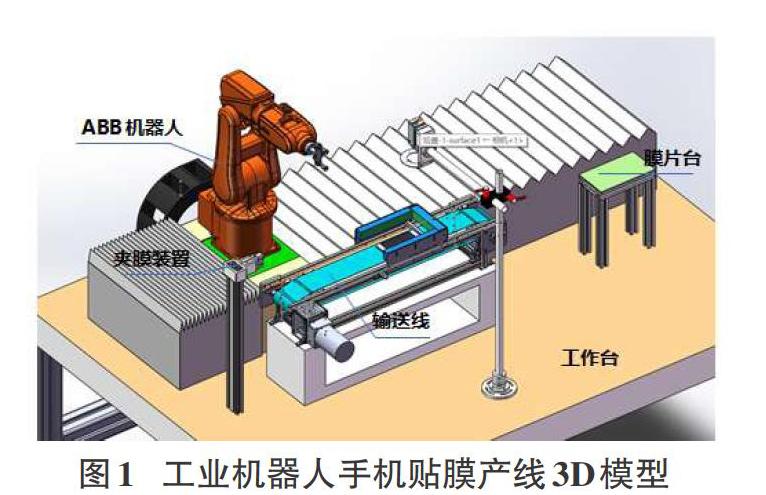
2 贴膜生产线结构建模
手机贴膜生产线由ABB机器人、手机皮带输送线、荚膜装置三部分组成。使用Solidworks3D造型软件完成生产线3D建模,如图1所示。
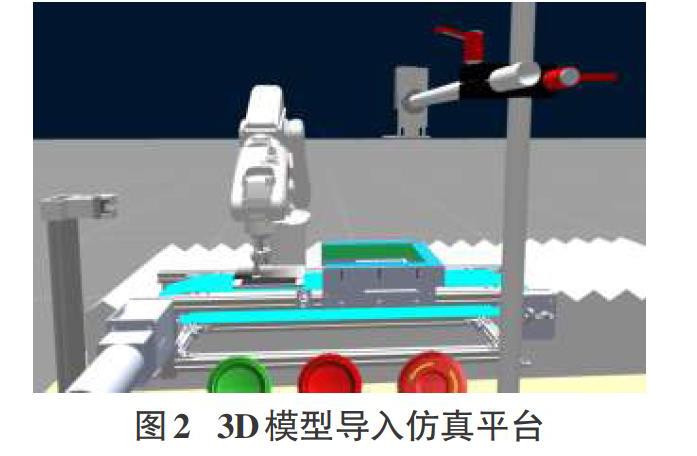
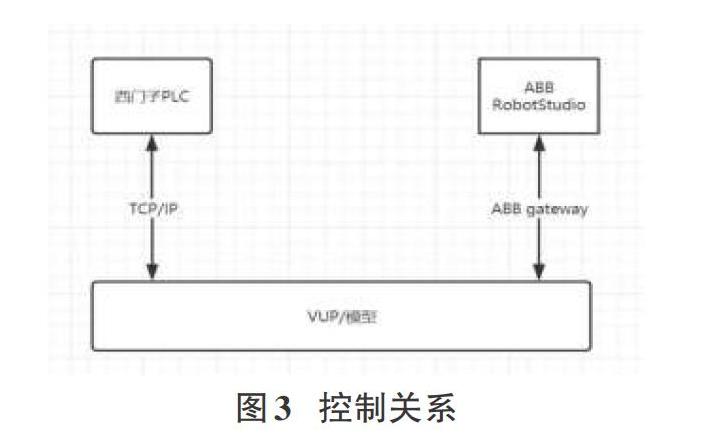
3仿真平台虚拟项目开发思路
虚拟项目的开发,主要包括仿真平台模型动作开发、仿真平台与硬件PLC通信、机器人仿真编程等三部分。首先,将手机贴膜生产线3D模型导入Vup仿真平台,如图2所示,添加零部件动作,关联仿真I/O信号。Vup平台通过TCP/IP网络通信协议与西门子S7-1200PLC通信。另外,通过Vup平台ABB gateway功能打开第三方机器人仿真软件robotstudio,设置ABB机器人标准I/O信号板,设置机器人DIDO信号,示教机器人动作,编写机器人程序。VUP仿真平台、PLC、Robotstudio三者控制关系如图3所示。
4 硬件电路设计
“虚实结合”的控制主要体现在“实对虚”的控制上,也就是说现实的按钮、传感器等要对虚拟设备的动作产生影响。在虚拟平台以外,搭建真实的硬件电路,主要包括电源、PLC、按钮、传感器等组成。由于控制对象为虚拟产线,因此传感器也可以通过按钮来模拟替代,PLC信号分配如表1所示,硬件电路接线图设计如图4所示,图5为硬件搭建效果。
5 控制流程设计
工業机器人手机自动贴膜生产线,其工作过程分为机器人取膜片、机器人撕膜片和机器人贴膜片三部分。ABB机器人在两个工作位间移动:吸膜位(取膜位)和撕贴膜位,皮带输送线模拟手机生产流水线,输送线尾端预留了视觉相机,贴膜完成后可以扩展机器视觉检测功能。整个生产线控制流程如图6所示。
6 结束语
工业机器人手机自动贴膜生产线全套设备耗资巨大的同时占地面积也大,通过虚拟仿真技术真实再现设备的控制和运行,大大降低了设备资金投入,该项目的顺利完成,为职业教育解决了教学设备短缺的问题,为企业项目研发提供了新途径。
参考文献:
[1] 宋晓阳.基于虚拟仿真技术的PLC实验教学平台研究[J].网络信息工程,2019(7):73-75.
[2] 陈毓莉,陈松茂,杨林丰,等.基于虚拟仿真技术的PLC实验教学研究与实践[J].机械制造与自动化,2018,47(2):89-92.
【通联编辑:光文玲】