基于行车动力学的交通安全仿真技术研究
2020-06-07华贵龙曹二星
华贵龙, 曹二星
(安徽省交通规划设计研究总院股份有限公司;公路交通节能环保技术交通运输行业研发中心,安徽 合肥 230088)
0 引 言
公路是车辆安全行驶的载体,在公路的设计阶段应该重点考虑车辆因素和驾驶人员因素,也就是应该满足车辆的动力学特性和驾驶员的驾驶特性,设计优良的路线应具有良好的车辆适应性和驾驶员适应性[1]。基于人、车、路三者的协调性进行路线设计是目前研究的热点问题。本文基于行车动力学理论,考虑驾驶员行车特性,针对低等级公路目前设计中存在的问题进行研究,通过仿真试验,得到了车辆在低等级公路上的运行特征,进而选取评价指标,对路线安全进行评价,提出对所评价公路的安全建议,使公路安全性大大提高。
1 Carsim 软件介绍
Carsim是Vehiclesim 软件系列的其中一款,它是美国Mechanical Simulation 公司设计的一款研究车辆行驶工况的多功能仿真软件,软件内部具有专业的车辆动力学模型、驾驶员驾驶模型以及道路模型[1],以期研究各种复杂工况下的车辆行驶状况,软件的组成如图1所示。

图1 Carsim 的组成
(1)软件建立模型的参数输入(Model Parameters and Inputs):主要是建立对于驾驶人、仿真车辆、所设计道路的模型。
(2)仿真程序(Run Control):是软件的核心部分,通过将所建立模型进行提取并且进行内部运算,可以对各种试验工况进行仿真,得出结果。
(3)结果输出(Output and Post Processing):可以输出仿真运算的最后结果,可以通过动画、图表形式将结果进行展示,也可将仿真结果导出,方便数据的分析研究[2]。
2 仿真模型的建立
2.1 车辆模型的建立
Carsim的软件数据库中,针对目前运营较多的车型进行了分类,其中以小客车车型为主。小客车的车型主要被分为A、B、C、D四类,软件为各个车型设置了原始参数,使用者可以根据实际情况对车辆参数进行修改,为道路线形的安全性评价提供了丰富的车辆选择。软件基于传统的车辆结构建模方式,将悬架独立的车辆简化为10个系统:1个整车系统、4个簧下系统、4个轮胎系统、1个发动机动力系统。对车辆进行简化之后,软件根据已有研究,建立多体动力学车辆模型,结合驾驶员模型和道路模型对车辆的行驶状况进行仿真与运算[3]。Carsim的整车模型包括7个子系统:车身、空气动力学、传动系、制动系、转向系、轮胎和悬架系统,如图2所示。本文建立的小客车模型的参数见表1。
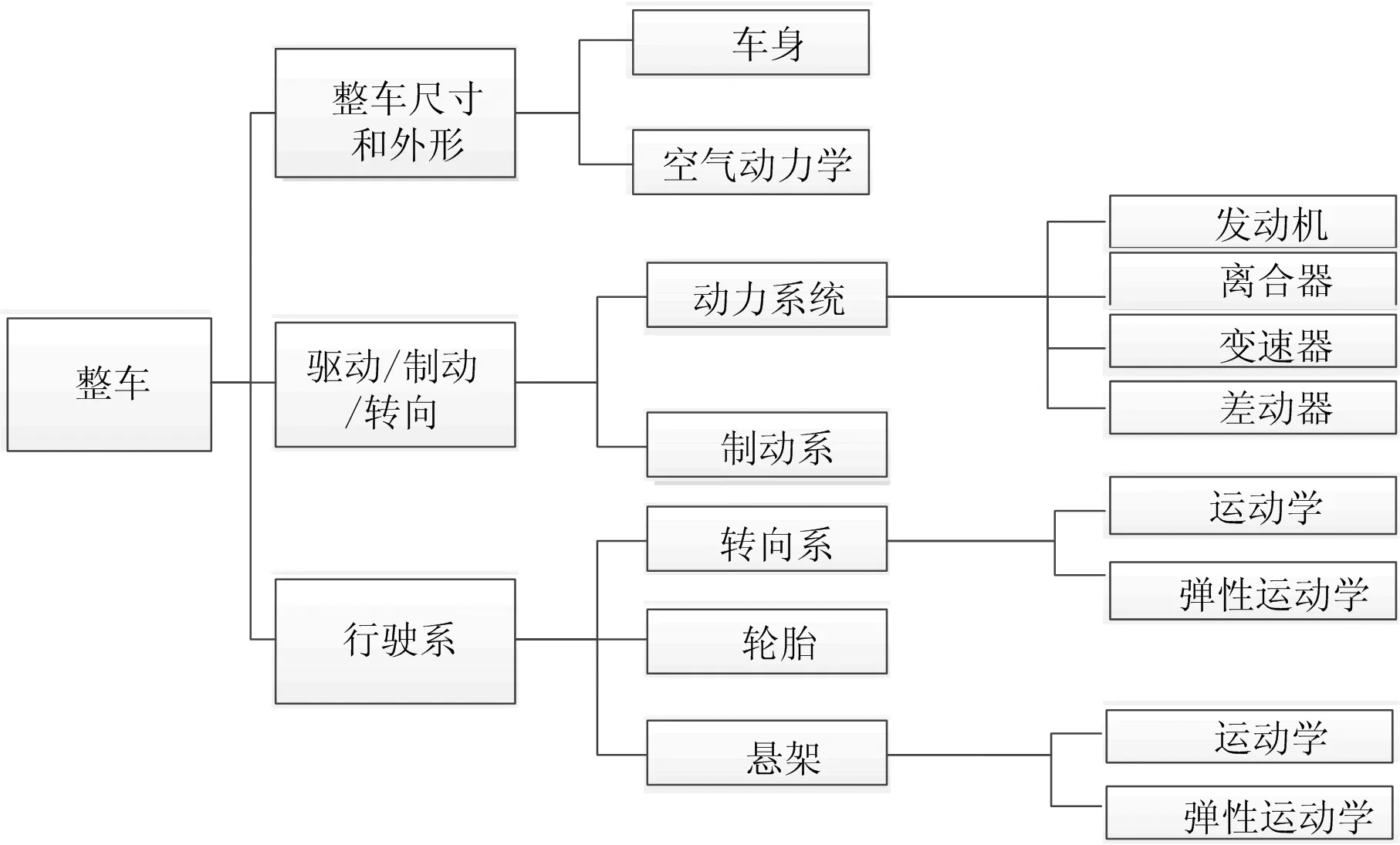
图2 车辆模型组成
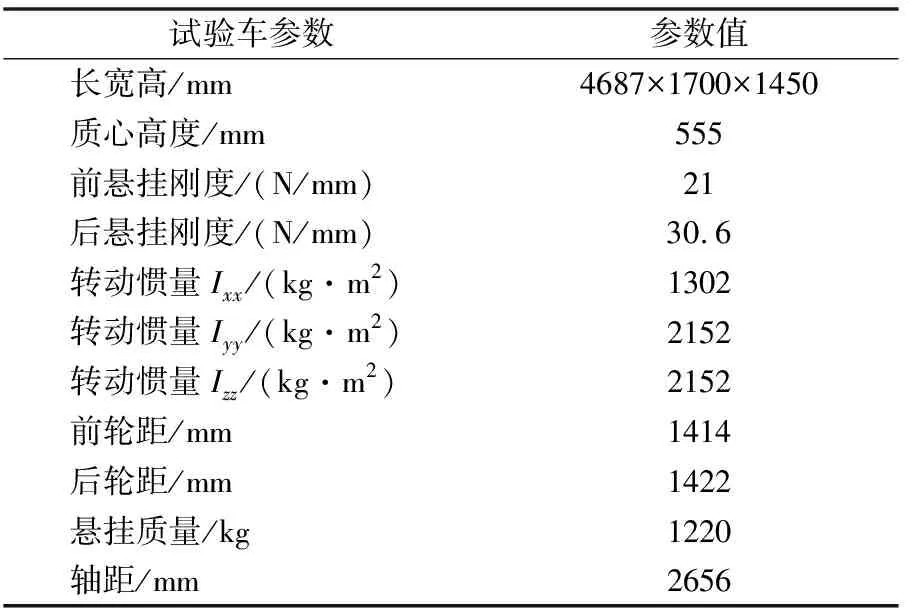
表1 车辆模型参数
2.2 道路模型的建立
Carsim中的道路模型是由一个坐标轴建立起来的,坐标轴的原点位于道路的起始位置的中线处,道路桩号增加的方向为X轴数据增大的方向,道路横向增加的方向为Y轴数据增加的方向。在对道路线形设置完成后,还可对路面铺装、摩擦系数进行设置。将道路的平、纵、横参数分别输入到软件中去,Carsim 界面可以根据用户需求将建立的道路模型生成为动画展示出来[4]。路径的长度是由S来衡量的,软件根据输入的X、Y坐标,应用毕达哥拉斯定力,对路径长度进行计算,计算方法如式(1)所示,计算原理如图3所示。
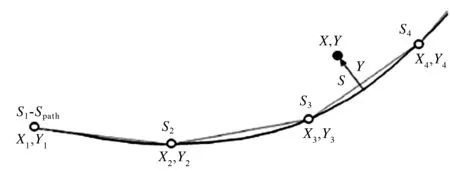
图3 S计算原理示意图
(1)
2.3 驾驶员模型的建立
汽车是驾驶员行驶的载体,汽车驾驶人员在道路上驾驶车辆行驶时,通过转向、加减速等改变车辆的行驶状态,以此来保证车辆的合理行驶。所以车辆、道路、驾驶人三部分模型的建立都是必不可少的,三者组成了一个整体。建立合理的驾驶人模型,通过改变驾驶人的操作来改变仿真工况,发现公路在设计时的问题,以期提高路线的安全性。
Carsim中的驾驶人模型是由C.C.MacAdam 教授提出的最优预瞄控制模型(optimal preview control,OPC),是公认的最优的轨迹模型之一[5]。预瞄最优控制模型的轨迹跟随程度非常高,模型根据最优控制理论,应用轨迹追踪的极小值对驾驶员路径进行跟随,从而得出路径。
3 基于行车动力学的公路线形安全评价指标研究
本文在对已有道路线形安全性评价方法进行研究后,建立基于Carsim的公路线性安全性评价指标,并且在软件中建立人、车、路模型,对路线安全进行仿真评价,最后提出改进措施。关于评价指标的选取,从汽车运行速度、车辆操纵稳定性指标和驾驶人感受指标三个方面来考虑。
3.1 速度指标
通过Carsim中驾驶人速度控制模型可以方便地得出车辆的运行速度,车辆会将道路线形反馈给驾驶人模型,进而模型内部通过算法将速度输出给车辆,使车辆能够根据道路的线形状况行驶。已有研究表明,车辆的最大速度、最大加速度、最大侧向加速度可以很好地评价车辆行驶的安全性。
仿真采用陕西省某山区二级公路,驾驶人的反应时间设置为0.15 s,预瞄时间为1.5 s,选取小客车为典型车型进行模拟,期望速度分别设置为60 km/h、70 km/h、80 km/h,结果如图4所示。
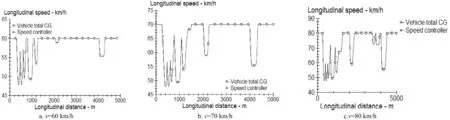
图4 运行速度仿真图
本试验中选取线形较为复杂的某山区二级公路进行仿真,从图4可以看出,车辆在行驶时,速度随着道路的线形在不断变化,而目标速度和实际速度是不同的,目标速度是由道路线形所决定的,而实际速度则与车辆和驾驶人有关。当驾驶人员以期望的速度在公路上行驶时,车辆会根据驾驶人的反应、路线的变化而做出改变,进而改变行驶速度,使车辆的行驶速度能够不断适应线形,这与车辆在实际工况中行驶是一致的,这也说明了软件动力学模型的合理性。从图4可以看出,车辆的最低行驶速度与期望速度是无关的,最低运行速度只与路线线形有关。从图4还可以看出,车辆运行速度的最低点都是位于相同的位置,这些位置是路线的圆曲线半径最小处。期望速度主要影响了车辆相邻路段的速度差,当车辆在线形良好的路段行驶时,速度差较小,而当车辆在线形条件差的路段上行驶时,速度差Δv会增大。研究表明,当相邻路段的速度差大于20 km/h时,则认为此道路的线形条件是不好的。基于以上分析,可以通过应用软件进行仿真试验,对道路线形可以进行很好的评价,为道路设计人员提供良好的建议。
3.2 汽车操作稳定性指标
汽车的操作稳定性是指当驾驶员在道路上驾驶车辆时,能够保证行车安全并且驾驶人心理、生理保持正常状态,当遇到外界干扰时,能够保持正常的行驶状态。基于已有研究,本文提出以下指标来评价车辆的操作稳定性。轨道跟随是指车辆能够以目标道路中心线行驶的能力,用轨迹偏移值这一指标可以很好地反应轨道跟随的误差。吉林大学郭孔辉院士认为,轨道跟随误差在0.3 m内是可以接受的。侧翻是大货车在道路上行驶时常见的失稳形式,其直接原因是车辆两侧轮胎受力不均匀,当一侧轮胎受力为0时,车辆即发生侧翻,所以在选取评价指标时,以车辆的轮胎所受垂直力来反应侧翻的安全性。侧滑现象以小客车居多,在道路的弯道路段,当车辆提供的侧向力不足以抵消离心力时,车辆即发生侧滑。我国标准规定重型车辆和普通车辆的侧向加速度的阈值分别为0.3g和0.4g。
选取路线复杂的陕西省某二级路进行仿真,车型选用小客车,驾驶员预瞄时间为1.5 s,仿真速度分别为60 km/h、70 km/h、80 km/h。仿真结果如图5~图7所示。
图5 轨迹跟随误差对比
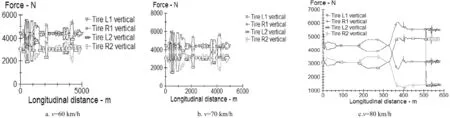
图6 汽车4个轮胎的垂直作用反力对比
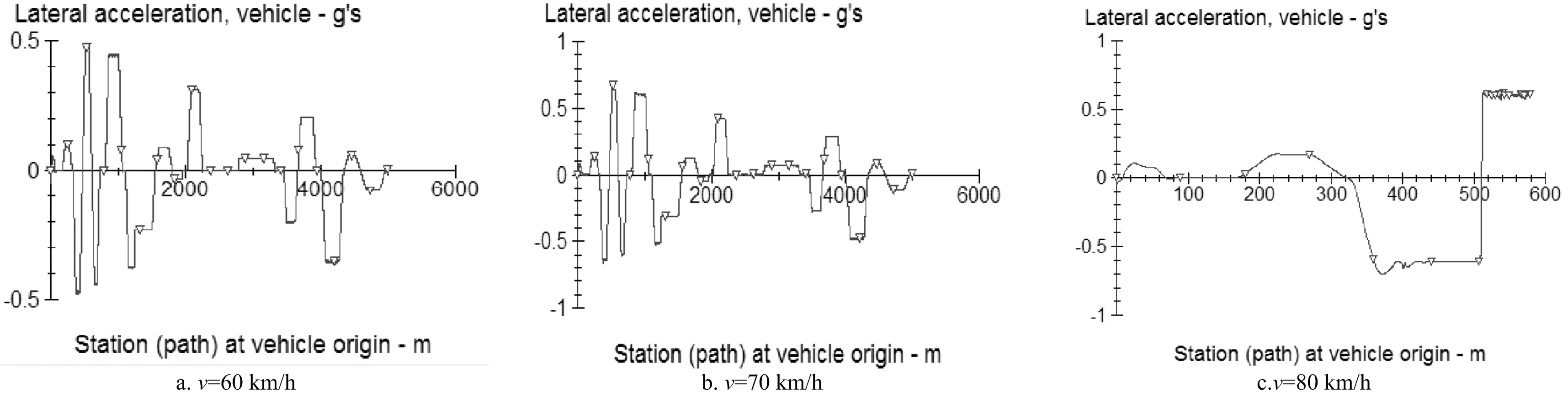
图7 侧向加速度对比
从图5可以看出,车辆以60 km/h、70 km/h行驶时,均能安全驶出弯道,而当速度增加到80 km/h时车辆驶出路基,驶出的位置正是路线的急弯处。而且随着速度的增大,车辆的横向偏移也越来越大。车辆在弯道路段较直线路段偏移量大,但是在速度为60 km/h、70 km/h时都没有超过阈值0.1,说明是安全的。而当汽车的速度为80 km/h时,在380 m处横向偏移量突然增大,车辆处于危险状态。
从图6可以看出,当车辆以小于80 km/h的速度行驶时,车辆两侧轮胎的受力都在2 000~6 000 N,而当车辆以80 km/h的速度行驶时,两侧轮胎受力变化较大,在行驶的后半段,两侧轮胎受力差值已经达到5 000 N,这对车辆的行驶是危险的,尤其是对于大货车容易发生侧翻。
从图7可以看出,三种工况下的侧向加速度最大值均大于0.3g,而且侧向加速度的最大值随着速度的增加而增加,这意味着危险也越来越大。车辆以80 km/h的速度在试验道路上行驶时,已经发生了侧滑,并导致车辆冲出路基。
基于以上分析,文章选取的车辆操作性指标均能很好地反应出车辆在道路上行驶的稳定性,能够反映出道路线形设计中所存在的问题。设计者可以通过以下措施对道路线形加以改进:在设计阶段,应该优化路线线形,特别是弯坡组合路段,避免车辆以较高的速度进行转向,引起危险;在道路运营阶段,管理人员可以通过设置减速标志、弯道提醒标志等提醒驾驶员减速行驶,减少安全事故。
4 结 论
利用行车动力学仿真软件Carsim,分别建立驾驶人预瞄轨迹模型、车辆模型、道路模型,通过仿真试验,研究了陕西某山区公路复杂线形条件下小客车的运行工况。并且建立了基于行车动力学仿真的车辆安全性评价指标:速度指标和车辆操作稳定性指标。分别将小客车的期望速度设为60 km/h、70 km/h、80 km/h,对比分析了不同速度下的车辆响应状态,对路线的安全性进行了分析。研究结果表明:该仿真试验可以很好地对车辆的行驶进行仿真,仿真结果可靠。该研究结论能够为路线的安全设计起到很好的反馈作用。
