柔性力学传感器技术研究现状及发展趋势
2020-06-06于海超咸婉婷王洋洋
于海超,咸婉婷,徐 冬,王洋洋
(中国电子科技集团公司第四十九研究所,哈尔滨 150001)
0 引言
自20世纪60年代MIT(麻省理工)的媒体实验室首次提出“柔性”的概念后,电子技术开始逐步进入“柔性时代”。近几年来,人工智能领域的快速发展推进智能设备普及化,需求牵引助力了全球柔性电子技术的迅猛发展。据相关机构预测,到2028年,全球的柔性电子产业规模将会达到3 101亿美元[1]。柔性传感器作为柔性电子技术中的重要组成部分也将趁势而起,会成为当今世界最具发展前景的电子领域核心基础技术之一。
柔性力学传感器具有随形性、柔韧性和延展性等特点,相较于传统的刚性传感器具有更广阔的应用空间与更强的环境适应性,尤其在生物、医疗、机器人、智能制造、环境监测等方面的应用潜力巨大,因此吸引世界各大先进研究机构与企业不断在该领域投入大量的资金和人力[2]。我国目前对柔性力学传感器的研究还处在初期阶段,对关键敏感材料与感知机理还需要进行大量的基础研究与工艺摸索。本研究根据信号转换方式的不同对柔性力学传感器进行了分类概述,详细介绍了每类传感器的最新研究进展,最后展望了柔性传感器技术的发展趋势。
1 柔性力学传感器概述
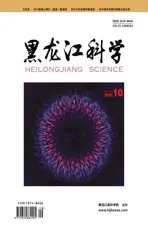
柔性力学传感器技术研究和解决的主要问题是如何将外界形变的刺激信号有效转换为电信号。目前,发达国家研究出了多种形态和原理的柔性传感器,部分先进的研究成果如图1所示。
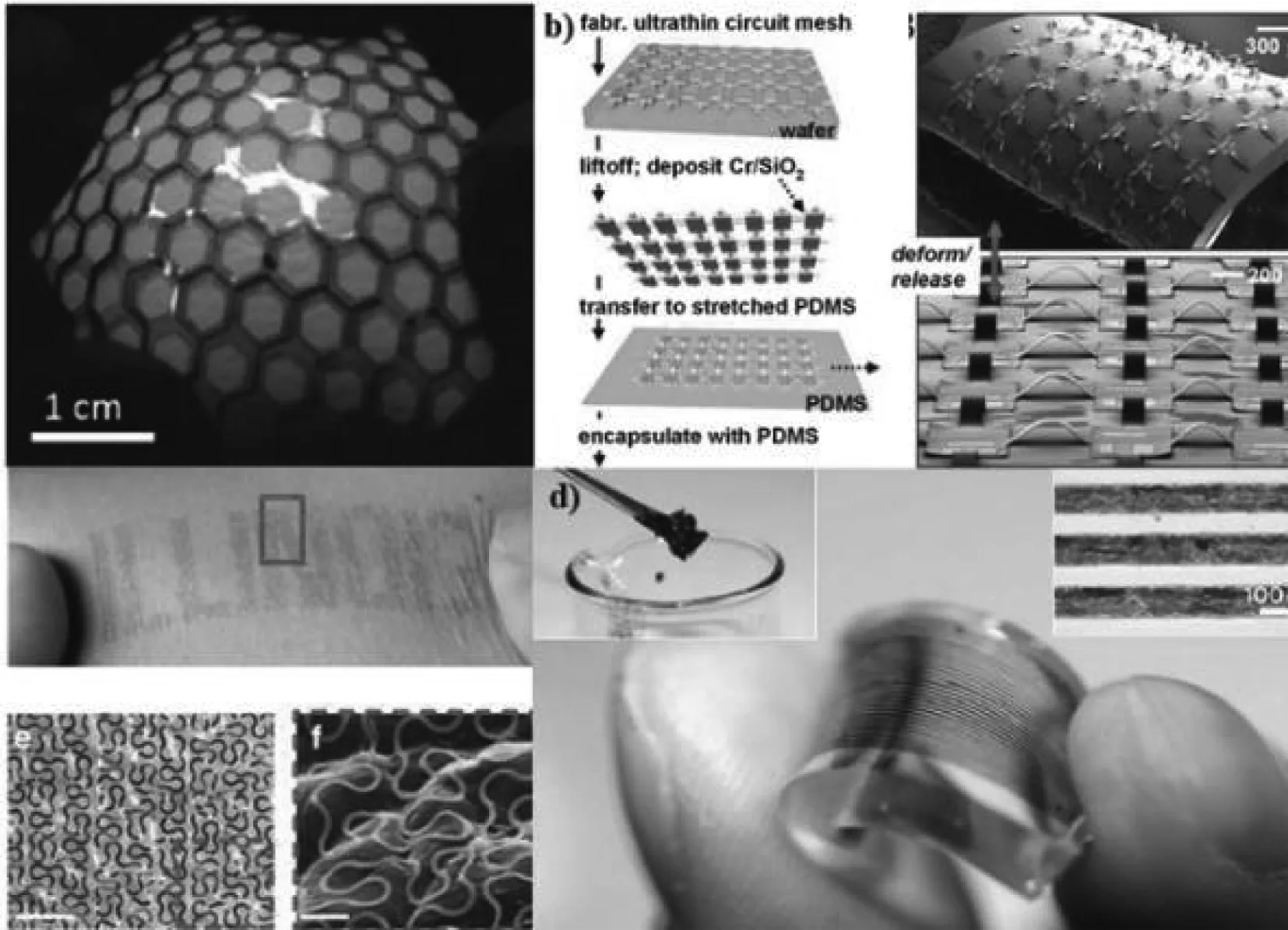
图1 柔性力学传感器研究成果Fig.1 Research results of flexible mechanical sensors
常规的柔性力学传感器根据其信号转换方式的不同主要分为压阻式、压电式、电容式三种类型[3]。图2即为三种传感器的信号转换机制示意图。

图2 柔性力学传感器常见测量原理示意图Fig.2 Schematic diagram of common measurement principles of flexible mechanical sensors
除此之外,部分新成果,包括光学效应、电磁效应等信号转换机制的柔性力学传感器,近年来也受到了高度关注。
2 常规柔性力学传感器
2.1 压阻式
压阻式力学传感器的基本原理是功能层的压阻效应,能将外界刺激信号转变为电阻值的变化,通过阻值测量,实现力学信号采集。柔性压阻式传感器具有结构简单、能耗低以及检测范围广等优势,吸引了大批科研工作者进行深入研究。
2019年,南京工业大学和西北工业大学合作,以简便、绿色环保的方法开发了一种全纸基柔性压阻式压力传感器。该传感器将银纳米线涂在薄纸上,在纳米纤维纸上印制电极。封装后的传感器在0.03~30.2 KPa范围内显示出1.5 KPa-1的灵敏度,弯曲后仍能保持优异的性能[4]。目前,此传感器已经成功安装在人体皮肤上,监测身体健康状况。
MXenes是一种类石墨烯的新型层状二维晶体材料,具有优良的导电性和机械柔性,也是柔性电阻式传感器的热门材料之一[5]。Yang等[6]构建了一个独特的Ti3C2Tx纳米片---纳米颗粒杂交网络,其中纳米颗粒的迁移使电阻发生了较大变化,而纳米片与纳米颗粒之间形成的桥梁即使在较大的应变区内仍能维持导电通路的连通性。该传感器在全量程范围内的GF>178.4,循环5 000次以上仍能保持良好的稳定性。Ma等借助选择性蚀刻技术制备出MXenes材料(Ti3C2),其研究发现,当施加压力时,MXenes层间距变小,相应的导通电路和电流增加,使电阻减小,当完全撤去外力后,MXenes可恢复至最原始状态。将此MXenes材料与聚酰亚胺叉指电极结合后,制备了一种层间距可调的MXenes基高灵敏柔性压阻传感器,其灵敏度高(GF:180.1),响应时间<30 ms,循环稳定性极好[7]。
图3 (a)MXene基压阻传感器机理示意图 (b)等效电路图[8]Fig.3 (a)Schematic diagram of MXene-based piezoresistive sensor (b)Equivalent circuit diagram[8]
2.2 压电式
压电式柔性力学传感器的力学感知原理是利用具有正逆压电效应的材料受力产生电荷来进行力学感知,受到外力作用发生形变导致其内部电荷定向分布,产生极化,在材料的两个相对界面出现电压[8]。柔性压电传感器具有响应速度快、灵敏度高的优势,被广泛应用于电子皮肤、智能服装、医学探测等领域。
Wang等[9]利用柔性的ZnO纳米棒阵列和锡化铟(InSe)场效应晶体管组成压电式传感器。ZnO纳米棒阵列将应力转变为压电电压,锡化铟(InSe)场效应晶体管则有较高的场效应迁移率,可有效放大压电电压,从而保证信号传输的稳定性。经测试发现,这种传感器可以感应到0.1 g的最低负载,对应的压电电压为0.2 mV。2019年,加州大学伯克利分校的林立伟教授团队成功研制出一种可用于人机交互界面的柔性薄膜压电驻极体驱动器/传感器。该柔性敏感膜厚度不足200 μm,压电系数约4 000 pC/N,在传感器模式下压力检测极限为1.84 Pa,6 000次循环周期后输出信号变化值<1%,在驱动器模式下可产生超过20 mN的驱动力,类似于手机振动模式,很容易被人体皮肤感知[10]。此研究的优势在于用较小的器件厚度实现较大的电荷储能。
2020年初,法国国家环保局柔性电子部Bastien Marchiori等人在聚二甲基硅氧烷基片上实现了一种可拉伸温度红外传感器。该传感器以聚偏氟乙烯三氟乙烯(PVDF-TrFE)为热电材料,这种材料夹在两个电极之间,第一种是由金覆盖的铝蛇纹石,以获得电接触和最大延展性。第二种是基于聚(3,4-乙二氧噻吩)—聚(苯乙烯-磺酸盐)(PEDOT:PSS),其与PVDF-TrFe具有良好的电相容性,并提供顶部电极的拉伸性,在不极化PVDF-TrFE的情况下,可达到35%的应变,并且其性能没有任何变化[11]。

图4 (a)PVDF-TrFE传感器三维示意图 (b)横断面图Fig.4 (a)Three-dimensional schematic diagram of PVDF-TrFE sensor (b) Cross-sectional view
2.3 电容式
电容原理的传感器具有高灵敏度、低延迟、快速响应和结构简单的优势,被广泛应用于电子皮肤、智能机器人、可穿戴设备与其他电子产品领域[12]。电容式柔性力学传感器的基本原理是利用外界刺激信号使电容器的极板间距[13]、正对面积或介电层的复合介电值[14]发生改变,使测量信号转换为与之有一定关系的电信号。
南洋理工大学的Edwin Hang Tong Teo教授利用多层六边形氮化硼泡沫(h-BNFs)的三维互联网络作为支撑框架,制备出密度低至15 mg cm-3且介电常数接近空气的轻质多孔BNF/PDMS复合泡沫,这是目前为止最轻的PDMS泡沫,它具有出色的机械回弹性和高达95%的压缩性,进行折叠、扭曲后释放能够恢复至原始状态,并且没有任何损坏。将其应用到非接触式触觉传感器时,其电容随着物体靠近而显著变化,而且变化幅度与物体尺寸有关。研究人员以花瓣为例将其放在电容传感器上,可显示0.58 Pa的负压,其△C/C0能达到0.21%[15]。这种轻质复合泡沫将会推动电容式传感器向多功能、高灵敏的方向发展。

图5 BNF/PDMS的多种形变图Fig.5 BNF / PDMS various deformation diagrams
Kou等[16]采用图案化的石墨烯/聚二甲基硅氧烷复合材料作为介电层,以空腔连续起皱的连续Au图案作为电极和天线,组装成了柔性电容式传感器。传感器在循环压力下测试的稳定性和耐久性突出,响应时间快,可检测微小的压力。除此之外,该传感器对手部弯曲和面部肌肉运动非常敏感,在未来的仿生电子皮肤、智能机器人等领域具有巨大的应用潜力。Xiong等[17]基于凸微阵列和超薄介电层柔性电极制备了高灵敏的柔性电容式压力传感器。此传感器由一个微阵列Au电极、中间超薄的PVDF介电层和底部微阵列Au电极组成,其灵敏度可达到30.2 KPa-1(0~130 Pa),响应时间为25 ms,检出限低至0.7 Pa,循环100 000个周期后仍能保持极高稳定性。经有限元分析表明,该电容式传感器的综合优异性能在监测生理信号的机器人抓取动作方面潜力巨大。
3 其他新型柔性力学传感器
近几年,也有一些新型柔性传感器如雨后春笋一般涌现出来。目前,大多数高性能的柔性触觉传感器都是依赖于电子运动实现信号传递,而清华大学的刘锴副教授提出了一种基于非对称离子电荷注入式超敏水凝胶柔性触觉传感器,只需要几十毫伏的工作电压就能实现0.075 Pa的极限检出能力,具有超高的灵敏度,可达57~171 KPa-1,而且进行多次冲压循环后仍能保持良好的稳定性[18]。该传感器可以应用在生物识别、水声检测等方面。而离子型检测技术和离子电荷注入技术的优势,也为开发新式高灵敏柔性触觉传感器提供了新的方向。硅质光纤传感器具有体积小、不受电磁场影响的特性,也是最近几年比较新颖的柔性传感器之一。Li等[19]设计了一种由嵌入在聚二甲基硅氧烷膜中的混合等离子体微光纤结形谐振的可穿戴传感器,能够抵抗强磁场干扰,在未来的军事战场、航空航天等特殊领域中具有显著优势。
4 结论与展望
本研究介绍了柔性力学传感技术常用的几种材料体系以及其在柔性传感器领域所取得的最新研究进展。随着制备技术和加工手段的创新以及新机理的提出,未来的柔性材料在种类和质量上都将会取得质的飞跃。现阶段的柔性传感器技术也取得了长足进步,本研究中介绍的压阻式、压电式、电容式等柔性传感器不仅具有高灵敏度、快速响应等优势,还能保持循环稳定性,将逐步在电子皮肤、智能机器人、人机交互、医疗健康监测等应用领域推出更为成熟的产品。未来的柔性传感器对技术指标、功能以及能耗的要求将会更高,研制出智能化、多功能集成化和零功耗的柔性传感器将会是今后的研究目标与趋势。
高灵敏度、阵列化的柔性力学传感器对先进算法的依赖性较强。人工智能、机器学习与海量数据处理技术的进步将带动传感器向敏感单元集成化、组合方
式阵列化、数据采集规模化的方向发展,从而实现单一敏感单元无法实现的功能与性能。以目前发展趋势预测,新型柔性传感技术将逐步颠覆传统传感技术,顶层需求牵引不断推进电子领域物化出新的产品形态,会引领世界电子技术全面进入“柔性时代”,未来可期。