基于模糊控制参数自整定的舰载雷达三轴稳定控制
2020-06-05崔恒荣卞玮章
崔恒荣,秦 雅,卞玮章
(中国船舶集团有限公司第八研究院,南京 211153)
0 引 言
具有机械稳定平台的三轴稳定系统采用纵、横摇及方位伺服系统控制一个机械稳定平台,使其在舰船摇摆时保持水平稳定,其中纵摇控制确保机械稳定平台相对于舰船纵摇保持稳定,横摇控制确保机械稳定平台相对于舰船横摇保持稳定;方位伺服系统控制安装在机械平台上的方位转台以保证雷达方位指向相对于正北稳定。实际应用中,纵摇和横摇控制必须采用闭环控制才能满足控制精度要求。由于舰船纵、横摇姿态角的幅值和周期均呈现出非线性和时变不确定性,其速度和加速度皆随舰船运动而变化。为保证控制精度和控制系统稳定性,PID控制参数必须根据舰船运动的变化而实时调整。当天线方位转速范围较宽且舰船姿态角变化剧烈时,采用人工细分的参数整定难以取得较为理想的控制效果。
常规的PID控制具有算法简单、稳定性好、可靠性高等特点,适用于各种线性定常系统。但是,对于负载时变、干扰因素复杂的对象,要获得理想的控制效果需要对PID的各个参数不断进行在线调整。模糊控制能够充分利用专家经验进行实时非线性调节,具有鲁棒性好、适应性强且便于软件实现等优点。本文将模糊控制与PID控制相结合,构建基于模糊自适应的PID复合控制器。实际应用表明,本控制器能够取得较好的控制品质,且无须对控制参数进行人工细分。
1 模糊理论算法
模糊控制是一种基于规则的控制。它直接采用语言型控制规则,利用了现场控制经验或专家知识,在设计中不需要建立被控对象的精确数学模型,且控制机理和策略易于接受与理解。基于模型的控制算法,由于其出发点和性能指标的不同,容易导致较大误差。而基于语言型控制规则的算法拥有相对的独立性,利用控制规律间的模糊连接可以使控制效果优于常规控制器。模糊控制对于数学模型非常适用于难以获取、动态特性不易掌握或变化非常显著的对象。在舰载雷达三轴稳定控制中,由于舰船运动的不确定性和时变性,采用模糊控制理论可以充分发挥其模糊控制作用,使整个控制系统取得较好的控制效果。
根据模糊论域的离散性或连续性,隶属函数可以取成分离的或连续函数的形式。当模糊论域取连续值时,隶属函数表示为

当模糊论域取离散值时,则可以表示为
实际应用中根据下式选取合适的隶属函数:
f(x)=exp(-|ax-b| r)
其中,a=1、b=0,根据r的不同取值可以近似于三角形、梯形或高斯型等函数,如图1所示。

图1 普适隶属函数图形
经过模糊逻辑推理后输出模糊集合。由于它是多条规则得出的结论的综合,需要对其进行清晰化,一般采用重心法、面积平分法、最大隶属度法来实现。当论域为离散论域时,则模糊输出的重心法计算方法为
式中,论域u={u1,u2,…,un}是离散论域,uj处的隶属度为A(uj),u为面积中心对应的横坐标。
2 模糊PID控制器设计
自适应模糊控制器结构如图2所示。把输入PID控制器的参数误差e(k)和误差变化率ec(k)同时输入到模糊控制器中,分别对3个参数KP、KI、KD进行调节。图中的模糊控制器由3个二维模糊控制器组成,其中二维模糊控制器采用双输入三输出的模式,经过模糊、近似推理、清晰化后,把得出的修正量Δkp、Δki、Δkd分别输入PID控制器中,对PID控制器系数进行实时在线修正。
控制误差
e(k)=r(k)-y(k)
误差变化率
ec(k)=e(k)-e(k-1)
PID控制算法为
u(k)=u(k-1)+kp[e(k)-e(k-1)]+kie(k)+kd
[e(k)-2e(k-1)+e(k-2)]

图2 自适应模糊PID控制器结构
控制误差e和误差变化率ec的变化范围定义为模糊集上的论域:
e,ec={-5,-4,-3,-2,-1,0,1,2,3,4,5}
其模糊子集定义为
e,ec={NB,NM,NS,0,PS,PM,PB}
子集中元素分别代表负大、负中、负小、零、正小、正中、正大。
误差、误差变化率与PID控制器3个参数KP、KI、KD间的模糊控制规则如表1、表2、表3所示。表中,纵轴为偏差e,横轴为偏差变化率ec。
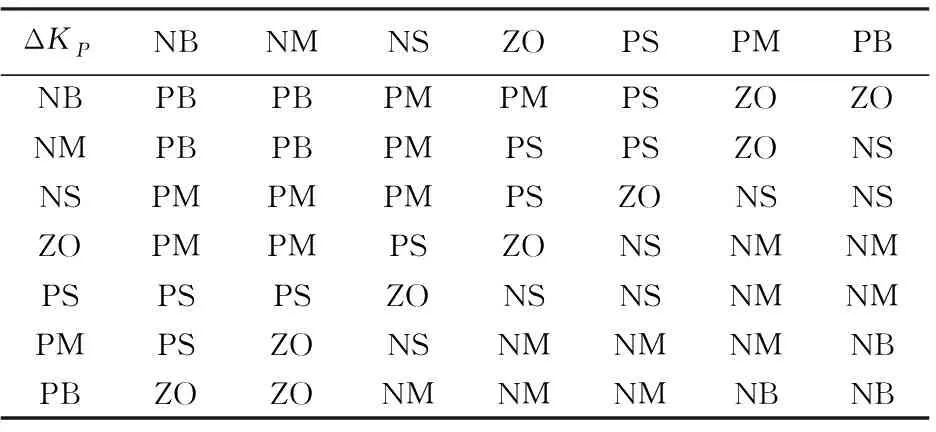
表1 KP的模糊规则表
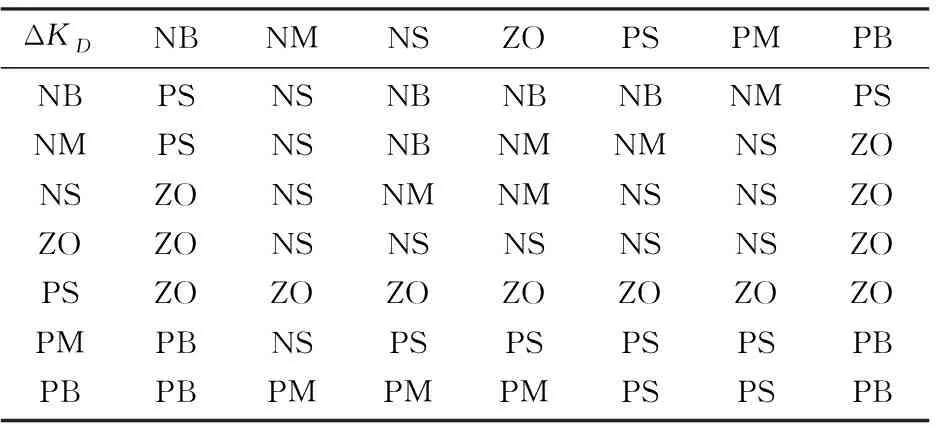
表3 KD的模糊规则表
e、ec、KP、KI、KD均服从正态分布,得出各个子集的隶属度。根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,查找修正参数带入下式,完成参数的修正过程。
kp=k′p+{ei,eci}p
ki=k′i+{ei,eci}i
kd=k′d+{ei,eci}d
3 三轴稳定系统控制
舰载雷达三轴稳定控制系统工作原理如图3所示。接口模块接收上位机发送的操控命令及导航系统发送的舰船姿态信号(纵摇、横摇、航向及航速),解码后发送至方位控制模块及平台控制模块,同时接收控制模块发送的控制信息及故障、状态信息,编码后发送至上位机。方位控制模块根据操控要求完成方位闭环控制,可实现方位环扫、扇扫、定位及跟踪功能。平台控制模块完成纵、横摇两轴稳定控制,确保机械稳定平台纵、横摇相对于舰船纵、横摇保持稳定。
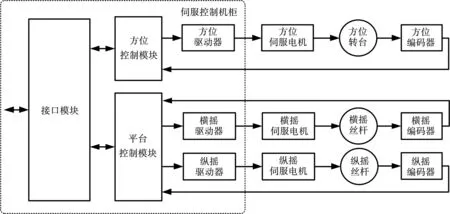
图3 三轴稳定系统控制原理
(1) 方位转台控制
基于模糊自整定的方位转台位置闭环复合控制如图4所示。图中,转台惯量2 600 kg·m2,速比65.45,速度15 r/min,加速度0.35 rad/s2,输入给定信号rin为方位控制角度信号,参考零位为正北零位,舰船航向H和转台舷角Ac(参考零位为舰艏)之和构成输入负反馈信号A。闭环控制的反馈参数输入模糊控制器,经过模糊、推理得到实时控制参数供PID控制器使用。同时,取方位给定值构成速度前馈算法来降低方位控制实时误差,确保控制精度满足要求。以方位控制15 r/min(90°/s)环扫为例,其控制结果如图5所示。从图5可以看出,天线方位运动平稳且控制误差较小。
(2) 稳定平台控制
对于有机械稳定平台的三轴伺服系统,平台控制即为纵、横摇控制。当舰船舰艏向上运动时,纵摇控制系统使机械稳定平台的纵摇轴向下运动, 从而确保机械稳定平台纵摇相对于舰船纵摇保持稳定。当舰船左舷向上运动时,横摇控制系统使机械稳定平台的横摇轴左舷向下运动,从而确保机械稳定平台横摇相对于舰船横摇保持稳定,反之亦然。两者的控制方式完全一样,如图6所示。
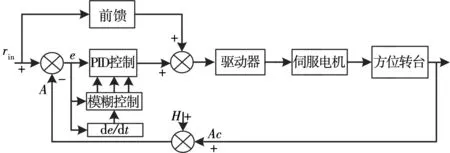
图4 基于模糊自适应的方位转台控制

图5 方位控制曲线及控制实时误差

图6 基于模糊自适应的平台纵/横摇控制
以横摇控制为例,其惯量3 100 kg·m2,速比1 292,惯性力矩2 300 Nm,峰值角速度0.146 rad/s,峰值角加速度0.096 rad/s2,输入给定信号rin为舰船横摇R的负值(-R),机械稳定平台的横摇R′为闭环控制系统的反馈信号。闭环控制的反馈参数输入模糊控制器,经过模糊推理得到实时控制参数供PID控制器使用。同时,取横摇给定值构成速度前馈算法来降低横摇控制实时误差,确保控制精度满足要求。设定舰船横摇输出为幅值20°、周期9.5 s的正弦波信号,其控制结果如图7所示。从图7可以看出,横摇运动平稳且误差控制在合理范围之内。

图7 横摇控制曲线及控制实时误差
4 结束语
舰载雷达稳定平台纵摇、横摇控制随舰船姿态角的变化呈现出非线性和时变不确定性,采用常规PID控制需要进行人为的参数辨识划分,且参数整定困难效果不理想。本文针对此问题提出的采用模糊控制与PID控制相结合的解决方法,即基于模糊控制的PID参数在线自整定,能够实时对参数进行整定,具有较强的实用性。应用表明,采用该控制方法的雷达稳定平台能够有效满足控制系统的设计要求。
