交互式多模型算法在直升机跟踪中的应用
2020-06-05杨春华
马 珂,杨春华
(1.海军装备部上海局,上海 201206;2.上海广电通信技术有限公司,上海 200237)
0 引 言
对于载有舰载直升机的舰船而言,其雷达不仅要完成对海上目标的检测跟踪,还要在舰载直升机的飞行半径内对直升机进行定位,并通过其位置信息(方位、距离)滤波预测出直升机的运动信息(航向、航速),从而更好地完成在指定海区进行搜索、救护、运输联络等任务。直升机目标相对于雷达的运动大部分时间是作匀速运动的,但有时会加速、减速或转弯。另外,直升机目标飞行速度比海上目标快。根据直升机目标的特点,需要选择一种算法以便更快、更精确地得到直升机飞行的航向和航速。
IMM(Interacting Multiple Model)算法是具有转移概率的交互式多模型算法。这种算法在多模型算法的基础上考虑多个模型的交互作用,以此得到目标的状态估计。此种算法应用到直升机跟踪中,分为匀速运动和匀加速运动两个模型,两个模型交互作用后得到直升机的运动状态。
1 IMM算法说明
IMM算法目的是由目标在k-1时刻的状态变量估计出目标在k时刻的状态变量。示意图如图1所示。
具有N个模型的IMM算法从k-1时刻到k时刻的递推步骤:
(1) 设从模型i转移到模型j的转移概率为Ptij:

图1 IMM算法流程示意图
得到交互计算后r个滤波器在k时刻的输入:

其中


Pj(k|k)=(I-Kg(k)H(k))P(k|k-1)
其中
Pj(k|k-1)=F(k-1)P(k-1|k-1)F′(k-1)+Q(k-1)

Kg(k)=P(k|k-1)H′(k)/(H(k)P(k|k-1)H′(k)+R(k))
(3) 模型可能性计算

其中
(4) 模型概率更新
模型j的概率更新如下:
其中


IMM算法就是利用以上递推过程来完成的。
2 IMM算法在直升机跟踪中的应用
直升机跟踪过程分为以下几个部分:
(1) 目标录取
直升机目标录取过程由其他硬件部分完成。送到跟踪程序的目标点迹信息包括距离(r,单位:m)、方位(a,单位:°,0°~360°)、目标号(tid,范围:0~15)。
(2) 航迹与目标关联
关联过程:首先通过目标号tid关联航迹,再判断航迹是否在软波门内。若两者都满足,则目标与航迹关联上。
(3) 航迹管理(起始、更新、删除)
(a) 手动捕捉目标后,航迹起始;
(b) 航迹删除,包括手动删除和跟踪丢失删除;
(c) 航迹质量的更新是根据航迹关联上点迹的圈数定义为不同的质量,具体可根据实际调试结果修改。
(4) 航迹的滤波及预测
采用IMM算法,对航迹进行平滑滤波,预测下一圈的位置,计算航迹的速度、航向。单个航迹的预测滤波流程见图2。

图2 单个航迹滤波预测流程
3 IMM算法的实现
直升机跟踪中IMM算法采用2个模型,分别是匀速直线运动和匀加速直线运动。匀速直线运动模型的状态转移矩阵:
匀加速直线运动模型的状态转移矩阵:
其中,T为雷达天线周期。IMM算法实现流程图如图3所示。
图3中,卡尔曼滤波部分所包含的方程以及滤波流程如图4所示。

图3 IMM算法实现流程图
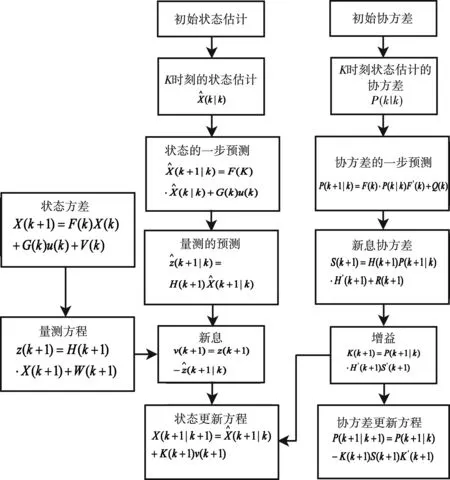
图4 卡尔曼滤波算法流程图
匀速运动模型的初值设置如下所示:
转移概率矩阵
噪声向量的协方差矩阵
匀加速运动模型的初值设置如下所示:
转移概率矩阵
噪声向量的协方差矩阵
匀速运动模型的概率初值u1=0.5,匀加速运动模型的概率初值u2=0.5,匀速运动模型的观测噪声的协方差初值R1=0.0001,匀加速运动模型的观测噪声的协方差初值R2=0.0001,其他速度初值、加速度初值等都设置为0。
4 结束语
IMM算法虽然比较复杂,但多个模型的交互作用适用于直升机跟踪,使跟踪算法能够快速、准确的收敛,并在实际中得到了证明。目前,该算法应用于匀速运动和匀加速运动两个模型,并还有模型扩展的空间。
