EMCCD集成偏振-微光一体化成像技术研究
2020-06-04陈远金张猛蛟常维静梁宛玉何伟基
陈远金,张猛蛟,戴 放,许 洁,常维静,梁宛玉,沈 吉,何伟基
(1.北京理工大学 光电学院 纳米光子学与超精密光电系统北京市重点实验室,北京 100081;2.华东光电集成器件研究所,江苏 苏州 215163;3.常熟理工学院 物理与电子工程学院,江苏 苏州 215500;4.南京理工大学 电子工程与光电技术学院,江苏 南京 210094)
引言
光电探测的核心是充分利用光所携带的信息[1-2]。偏振是指垂直于波传播方向的振动矢量偏于某些方向的现象。对于大部分人造目标在光照射下会有明显的偏振特性,通过偏振探测可获得除光强和光谱以外的新信息维度。因此,偏振成像被广泛应用于军事目标侦察、空间遥感、水面监测和3D 显示等领域[3-7]。为获得图像的偏振信息,传统采用分时[8]和分孔径[9]的方法,但这两种方法不可避免地损失实时性、集成度和光能量。在探测器焦平面上集成偏振单元可以克服实时性和集成度损失,获得高分辨率、高时效的偏振信息。2010年美国华盛顿大学率先在CCD 器件上集成了4 个偏振探测角度,实现了器件级的偏振成像验证[10]。2011年,日本奈良先端科学技术大学的Shishido 等探索了在65 nm 标准CMOS(complementary metal oxide semiconductor)工艺上集成偏振铝栅工艺,探测器消光比超过40,为偏振大规模集成应用提供了可能[11]。2016年SONY 发布了集成偏振单元的CMOS 图像传感器IMX250MZR,商业化的器件级偏振探测获得突破,为新技术的发展应用打开了大门[12]。然而,像元上集成偏振单元使得光的透过率降低,探测器的灵敏度严重衰减[13]。
为解决集成偏振单元引起光能量损失,本文提出一种全新的偏振-微光阵列结构,并结合高灵敏度电子倍增CCD(EMCCD)技术[14]。在四元周期排列结构中包含2 个白光通道和2 个偏振通道。通过改进斯托克斯方程求解参量,实现了偏振度和偏振角的解析计算及探测器的微光成像性能,克服了偏振成像能量损失问题[15]。
本文首先对偏振阵列的结构进行分析,给出单元的偏振、微光、融合模式的计算方法;然后,通过分时的方法,用EMCCD 相机和线偏振片获取了偏振-微光阵列结构的图像,对阵列结构的成像效果进行了测试验证;最后,验证了基于偏振-微光一体化阵列结构在低照度下的微光性能。通过实验验证,本文提出的基于EMCCD 的偏振-微光一体化成像技术可实现偏振探测和微光成像,并通过彩色融合凸显目标信息,实现了全新的具有微光和偏振探测功能的新型器件的验证。
1 偏振-微光一体化器件的工作原理
1.1 器件阵列结构
本文提出的像元阵列结构如图1所示,包含2 个白光通道和2 个偏振通道。虽然采用斯托克斯方程计算偏振信息至少需要3 个偏振方向,但是白光通道可以作为新的参量带入计算,这使得求解只需要各两个偏振方向就可以解析出目标的偏振度、偏振角和偏振因子等偏振信息。修改后的斯托克斯方程可以表示为

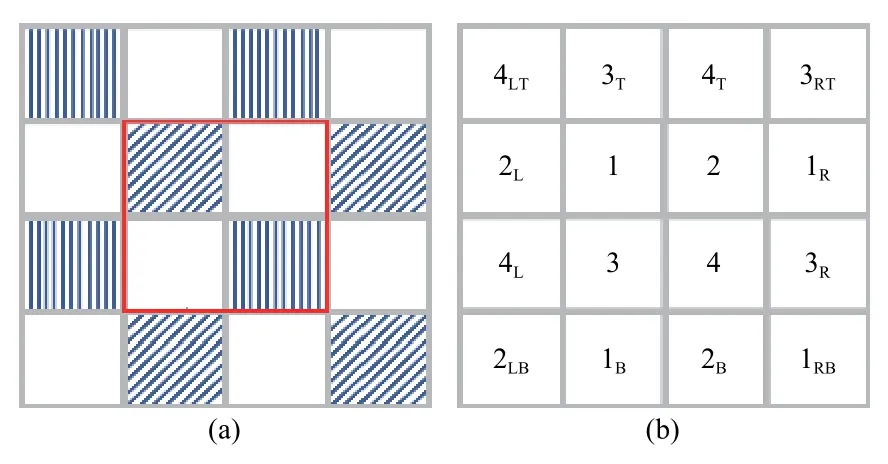
图1 探测器的阵列结构Fig.1 Array structure of detector
在偏振探测中,圆偏振分量与线偏振分量相比很小,可以不考虑,此时偏振度称为线偏振度(degree of linear polarization,DoLP)。线偏振度DoLP、偏振角 φ和偏振因子F分别如(2)式、(3)式和(4)式所示:

基于该阵列结构,可使探测器工作在3 种模式下:模式1-偏振成像模式,可以通过偏振单元对成像目标的偏振度和偏振角进行解析;模式2-微光模式,可以通过白光通道成像;模式3-融合模式,可以利用白光通道获取光强度信息再通过偏振单元获取偏振信息实现彩色融合成像。
1.2 图像解析算法
针对本文中的阵列结构,图像解析通过邻近像元获取本像素所不具备的偏振和强度信息。不同模式对应的成像算法不同。
1.2.1 偏振模式
该模式下,阵列中的4 个像元信息获取分别对应依据自身位置忽略白光通道的信息强度,通过对斯托克斯方程求解获得每个像元的偏振信息。
对于图1中的1 单元,本身为45°偏振通道,其他信息从邻近单元获取。90°偏振方向和亮度通道信息的计算如(5)式和(6)式所示:

对于2 单元,本身为白光通道,偏振信息从邻近其他单元获取,90°偏振方向和45°偏振方向信息的计算如(7)式和(8)式所示:

3 单元与2 单元类似,本身为白光通道,偏振信息从邻近其他单元获取,90°偏振方向和45°偏振方向信息的计算如(9)式和(10)式所示:

对于4 单元,本身为0°通道,其他信息从邻近其他单元获取,90°偏振方向和亮度通道信息的计算如(11)式和(12)式所示:

1.2.2 微光模式
微光模式下成像算法相对简单,由于低照度下的探测器分辨率会降低,因此合并相邻像元输出图像不会降低探测能力。该模式下,白光像元的灰度由像元自身提供,偏振像元的灰度由邻近的白光通道提供。
图1中1 单元本身不具有白光通道,灰度信息从邻近白光通道获取,计算公式同(6)式。3 单元灰度信息的计算公式同(9)式。
1.2.3 融合模式
融合模式将偏振信息和灰度信息同步显示,在融合模式下,利用白光通道获取光强度信息,再通过偏振单元获取偏振信息实现彩色融合成像。例如,在色域空间中将灰度图像作为Y通道,偏振度图像作为U通道,偏振因子作为V通道,可直接合成彩色融合图像。
实际处理上,由于偏振角的噪声较大,我们只使用了偏振度作为图像融合的色彩信息,实现和白光通道的成像的彩色显示。
2 实验结果与分析
选用带抗光晕结构的帧转移EMCCD 相机和偏振片(Thorlabs,WP25M-VIS)测试验证偏振-微光一体化器件的性能。实验装置如图2所示。

图2 EMCCD 相机实物(左)和偏振片(右)Fig.2 EMCCD camera object (left)and polaroid (right)
实验原理:将偏振片置于相机镜头前端,通过分时的方法获取不同偏振角度和无偏振白光图像。原始图像获取后,按照图1的阵列排布,合成偏振-微光一体化器件所对应采集图像。根据新合并输出的图像,解析计算不同模式下的成像。
2.1 偏振成像探测
通过上述实验装置,首先分时获取不同场景的白光通道和0°偏振、45°偏振、90°偏振、135°偏振的原始图像,如图3、图4和图5所示。
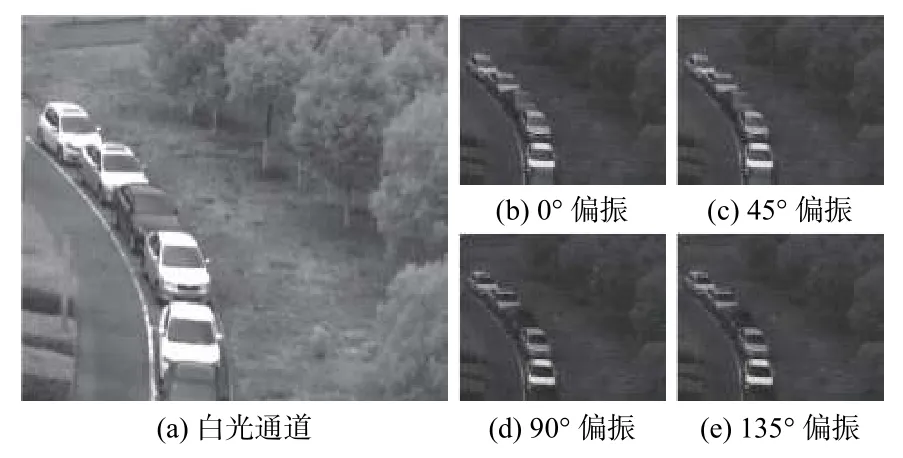
图3 采集的原始图像1Fig.3 Original image 1
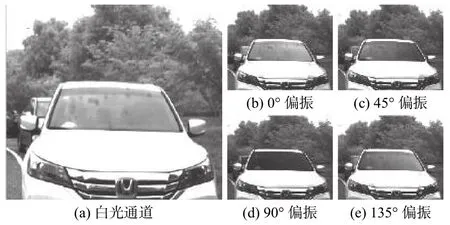
图4 采集的原始图像2Fig.4 Acquired original image 2

图5 采集的原始图像3Fig.5 Acquired original image 3
基于原始图像,按图1像元排列结构合成偏振-微光一体化器件对应的采集图像,模拟不同场景下新探测器的输出,如图6(a),图7(a)和图8(a)所示。
依据 (1)~(5)式,分别获取了场景1 的偏振度(图6(b))、偏振角(图6(c))和偏振因子(图6(d))的成像,场景2 的偏振度(图7(b))、偏振角(图7(c))和偏振因子(图7(d))的成像以及场景3 的偏振度(图8(b))、偏振角(图8(c))和偏振因子(图8(d))的成像。实验得到的偏振成像可以很好地解析出偏振信息,图6中车辆和道路在偏振度和偏振角图像中可以清晰分辨,图7中车辆上不同材质的部位在偏振度和偏振角图像中清晰可辨,图8中草丛中的手机(红框中)与周围的绿植在偏振度和偏振角图像中差异很大。
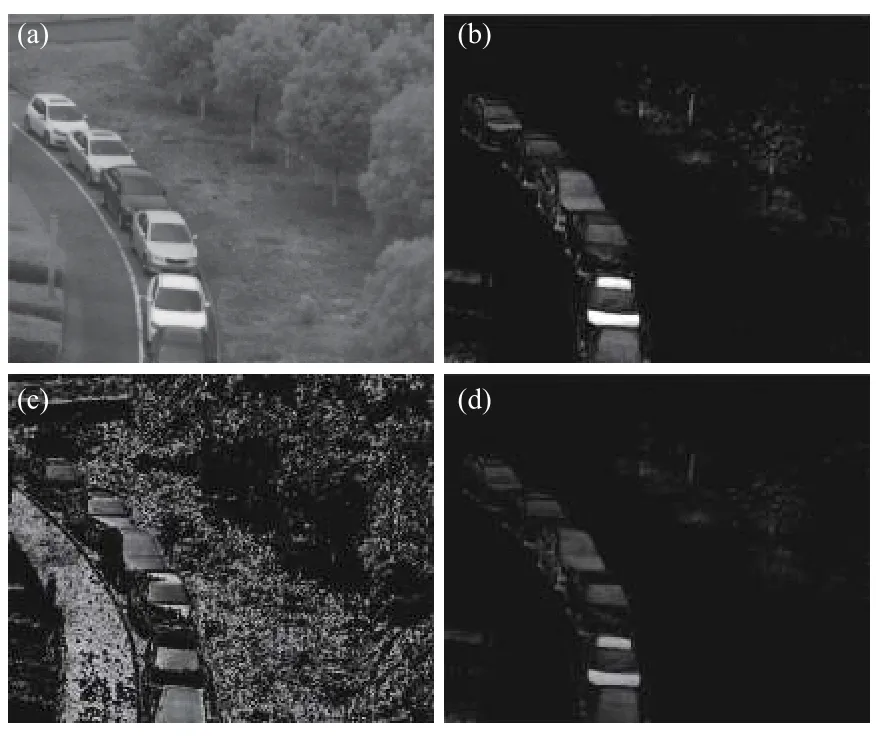
图6 偏振-微光一体化器件图像1(a)及偏振成像效果(b)、(c)、(d)Fig.6 Image of polarization-LLL detector 1 (a)and polarization images (b),(c),(d)
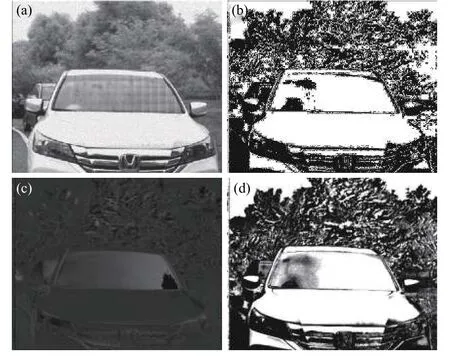
图7 偏振-微光一体化器件图像2(a)及偏振成像效果(b)、(c)、(d)Fig.7 Image of polarization-LLL detector 2 (a)and polarization images (b),(c),(d)
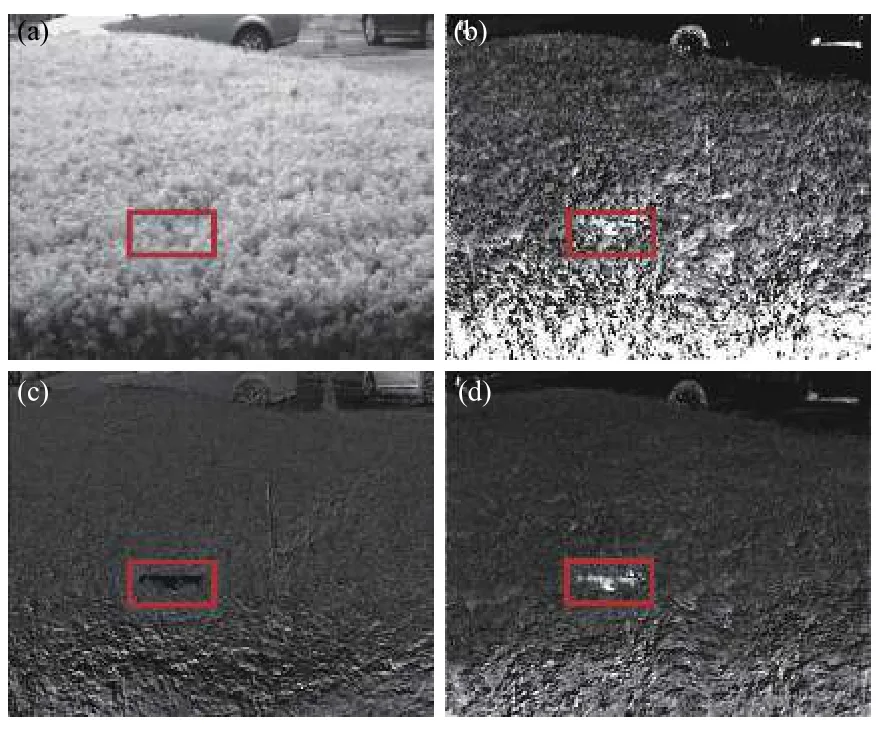
图8 偏振-微光一体化器件图像3(a)及偏振成像效果(b)、(c)、(d)Fig.8 Image of polarization-LLL detector 3 (a)and polarization images (b),(c),(d)
2.2 微光成像测试
EMCCD 由于内嵌电子倍增移位寄存器,在信号读出过程中可实现上千倍的增益,因此灵敏度很高,是一种全固态微光夜视器件。EMCCD 的高灵敏特性能克服偏振探测光能量损失问题,但是本身的微光性能会降低,而偏振-微光一体化器件则保持了器件的微光性能。
测试时,环境照度为1.1×10-3lx。EMCCD 相机的无偏振原始图像如图9(a)所示,图9(b)是中心区域的放大图像;根据图1的阵列结构和(6)式、(12)式,偏振-微光探测器获取的微光成像如图9(c)所示,图9(d)是中心区域的放大图像。从图中可以看出,EMCCD 和新探测器阵列结构都能识别0~2 组,探测器的分辨率得到了很好的保持。

图9 EMCCD 器件的微光成像(a)、放大图像(b)及偏振-微光探测器的微光成像(c)、放大图像(d)Fig.9 EMCCD LLL imaging (a),enlarged maging (b)and polarization-LLL detector imaging (c),enlarge images (d)
2.3 彩色融合
彩色融合是将偏振信息与灰度信息融合显示,不同场景的效果分别如图10、图11 和图12 所示,通过凸显偏振目标的颜色,可以在背景图像中很容易识别出偏振目标。

图10 场景1 偏振与灰度图像的融合显示效果Fig.10 Fusion effect of polarization and gray image in Scene 1

图11 场景2 偏振与灰度图像的融合显示效果Fig.11 Fusion effect of polarization and gray image in Scene 2

图12 场景3 偏振与灰度图像的融合显示效果Fig.12 Fusion effect of polarization and gray image in Scene 3
分析图10,背景树木以及道路的颜色与目标车的颜色相差较大;在图11 中,车辆不同部位、不同材质的颜色以及背景的颜色均有很大的差异;图12 中红框内目标偏品红而背景为绿色,基于颜色差异可有效实现目标的识别。
3 结论
信息公用是发展多维度信息探测的关键,本文提出了四元周期排列的偏振-微光一体化器件技术,由四元周期排列的2 个偏振通道和白光通道组成。该探测器最大限度地利用了感光阵列所获取的信息,通过后期的算法求解可实现探测器在不同模式下的信息重构,并可同步获取目标的偏振特征和保证器件的高灵敏度特性。我们通过分时图像获取的方式,模拟了基于偏振-微光一体化器件的成像,对新器件的偏振、微光和彩色融合模式进行了验证。实验结果表明,基于EMCCD 的偏振微光一体化器件可实现目标的偏振探测,并保持在低照度环境下的微光探测能力。该器件通过后期的算法求解可实现在偏振、微光和融合等不同模式下的信息重构,为多维光信息获取、可重构探测技术的发展应用提供了一种新的思路。
