气缸的摩擦机理与研究分析
2020-06-03苏威蒋文书
苏威 蒋文书

摘 要:气缸因为清洁、结构简单、廉价等优点而越来越受到广泛的应用,更因为其集成化的优势而在机器人等方面有几乎不可替代的作用。但是气缸也有本身不能够精确控制的弱点,主要是气缸在低速运行的情况下会产生爬行现象。而如何消除这一现象成为当前研究气动技术的一个重要方向。该课题主要以一个普通的气缸低速爬行现象模型为研究对象,以实现气缸可以低速平稳运行为研究目标,利用理论分析和AMESim仿真模拟相结合的方法,从建立精确的控制框图入手,深入研究通过颤振叠加来消除气缸低速爬行现象的方法。
关键词:颤振信号 控制框图 低速爬行现象 仿真模拟 气缸
中图分类号:TH138 文献标识码:A 文章编号:1672-3791(2020)04(c)-0051-02
1 气缸摩擦模型的研究
如图1所示,气压源通过A向无杆腔充气,压力上升;而有杆腔通过B排气,压力下降。当两侧压力差可以克服活塞与活塞杆的最大静摩擦力时,活塞开始移动。我们都知道最大静摩擦力小于动摩擦力,所以活塞开始运动的时候是做加速运动。随着无杆腔容积变化较大时,而气压源的供气又跟不上,此时无杆腔内压力减小,有杆腔内压力升高。当两侧压力差所产生的作用力等于动摩擦时,气缸停止加速。但是由于惯性,气缸仍会向前运动,由于两侧的压力差所产生的作用力小于动摩擦力,气缸做减速运动,直到速度为零,气缸停止,等到无杆腔内压力上升,气缸才会继续运动。一直保持重复着上面的运动。这个过程称为气缸的爬行现象。
2 爬行现象的解决方法
该文采用消除爬行现象的主要方法是叠加一个正弦的颤振信号,如图2所示。
颤振补偿是将高频信号引入系统当中从而改善系统动态性能的一种方法。在气动系统中加入高频颤振信号使得整个气动系统都在高频低幅的抖动中,系统的这种状态能够平滑低速下的不连续力,从而提高系统的动态性能。颤振信号补偿策略是根据系统的相关特性进行的一种补偿措施。在克服摩擦力影响中,颤振信号存在两种加入方法,主要对为了减小摩擦系数的加法进行叙述,对另一种方法不做叙述。
如图3所示,Uc=U(t)+Uk(t),U(t)是PID的一个输出,Uk(t)是所叠加的颤振信号,而Uc则是输出信号与输入信号的一个汇总。U(t)信号可以使得气缸以一个低速的运动方式进行运动,所以U(t)是一个低斜率的斜坡信号,斜率根据系统的具体情况来定。Uk(t)是一个等幅等频的正弦信号,具体数学式需调试确定,它是用来消除气缸的低速爬行现象的。
3 AMESim仿真及结果
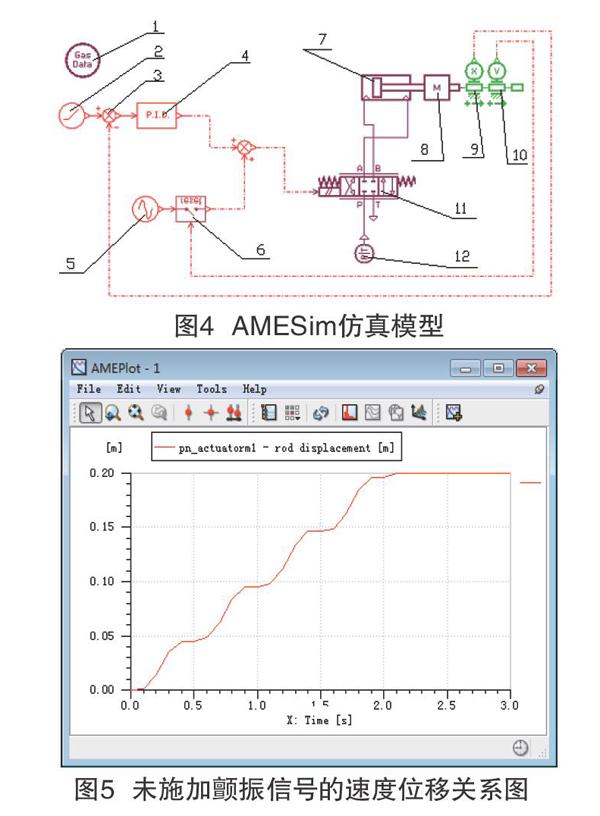
图4是通过AMESim软件建立的仿真模型图,1为气动库;2为斜坡信号,斜率代表气缸速度;3为比较点;4为PID控制器,其中比例为2000,积分为0,微分为200;5為正弦信号,幅值700,频率9.4Hz,相位0;6为控制开关,当接口2为0,开关闭合;7为气缸,动摩擦为100,静摩擦为110,行程为0.2m;8为负载,总移动质量为100kg;9为位移传感器;10为速度传感器;11为三位四通电磁比例换向阀;12为气压源,为6bar。
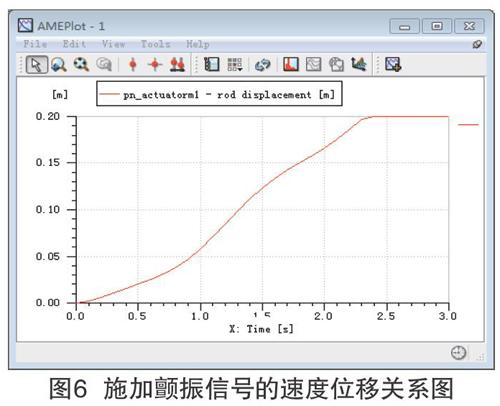
由图5、图6仿真结果显示气缸的爬行现象可以通过颤振信号的叠加来消除,以此证明通过颤振信号可以有效地消除气缸的爬行现象。
4 结论
该文正是针对气缸的摩擦机理与进行研究分析,来设计一个基于正弦信号的颤振补偿的气动控制系统。笔者主要完成了以下工作。
(1)详细了解了气缸的发展趋势和现状以及气缸的摩擦特性模型。
(2)详细了解了爬行现象的成因,并基于此建立了模型。了解了颤振补偿的理论依据,并建立了颤振补偿的控制方框图。使用AMESim软件建立了气动模型,并进行了仿真补偿,证明其可行性。
参考文献
[1] 赵秀华.叠加颤振信号的气动比例位置控制系统的研究[D].山东大学,2004.
[2] 孟德远.高精度气动同步系统研究[D].浙江大学,2013.
[3] 崔宗伟.气缸低速摩擦力特性的研究及其建模与仿真[D].哈尔滨工业大学,2008.
[4] 谢祖刚.气缸低速摩擦特性的研究[D].浙江大学,2003.
