基于多机器人协调的客户服务系统
2020-05-30沈云辉赖燕梅
沈云辉,赖燕梅,何 娟
(1.广东工业大学机电工程学院,广州 510000;2.首都师范大学文学院北京100089;3.中山大学管理学院,广州 510000)
0 引言
云是一个资源池,它包含大量虚拟资源(硬件、开发平台和I/O服务),用户可以对这些资源进行配置。这个资源池的调用通常基于准时、收费模式管理,它最显著的特性是软件即服务(SaaS)[1]。本文中机器人采用“机器人+云计算”模式,机器人的操作系统和数据库部署在云端,它可以调用API来实现语音识别、人脸识别和语义识别。机器人的发展日新月异,人类不仅希望单个机器人能够独立完成高复杂度的任务,也希望机器人能够合作完成任务。多机器人协调在智能农业、搜救、运输等领域得到了广泛地应用[2]。此外,云机器人和自动化研究[3]为多机器人协调在客户服务中的应用提供了现实的可能性。
本文将重点关注商业客户服务,重点介绍多机器人协作对客户服务的贡献。在商业交易过程中,商场服务机器人充当购物助手,这些机器人可以利用云服务技术实现信息的共享。机器人还可以收集顾客的信息,判断他们对商品的喜好,然后给顾客及时有效的建议。该技术将有助于为客户提供个性化服务。同时,多机器人协作的应用也为传统商店的转型以及传统商店的体验与电子商务功能相结合提供了一些可能性[4]。
机器人的协同通常分为合作协同和竞争协同。合作协同是建立在分工的基础上的,通过对任务的分工,将群体机器人分为若干个子群。根据协同方式进一步细化为合作协作和竞争协同[5]。竞争协同则是通过允许多个机器人拥有同一个任务或目标,建立承包机制。
随着近年许多研究者将研究重点转移到如何使多机器人更好地进行协调的研究上,多机器人系统和多移动机器人系统(MRSs)的研究在规模和重要性上都有很大的提高[6]。而当许多机器人一起工作,通信往往受到网络的限制,杰弗里·霍林格[7]和桑吉夫·辛格证明即时协调的滚动规划可以包含周期性约束,从而使与需要连续连接的算法相比有了显著的改进,并为机器人提供一个实现更好地实时信息交换的基础。近年来,在机器人的发展中,关于机器人的协同控制实验,曹永康等[8]人通过结合理论在多轮式移动机器人平台上进行应用分布式协作控制策略,探索分布式共识算法的有效性,同时避免了集中式协同控制方案易受通信范围和带宽限制以及对团队领导或集中站的干扰,不能扩展到团队中的所有机器人的弊端[8]。在最新的研究中,关于如何将多机器人彼此协同共识控制问题上,傅勤等[9]将Lyapunov泛函方法应用于具有分布参数模型的多智能体系统,并在适当的Sobole空间上解决这种多智能体系统的共识控制问题,进一步为机器人的协同工作方向打下基础。
本文所涉及的客户服务是人工智能客户服务。人工智能客户服务是指机器人通过语音与客户进行沟通,记住客户的记录,通过语义分析了解用户的意图,与用户进行友好的沟通,为客户提供必要的客户信息和其他相关服务所需的信息。人工智能客服是针对客户需求的创新服务。
1 系统架构
基于多机器人协作方法的客户服务系统框架如图1所示。包括组织层、客户端层、应用层、公有云服务层和私有云服务层、场景分类层和交互信息共享层。
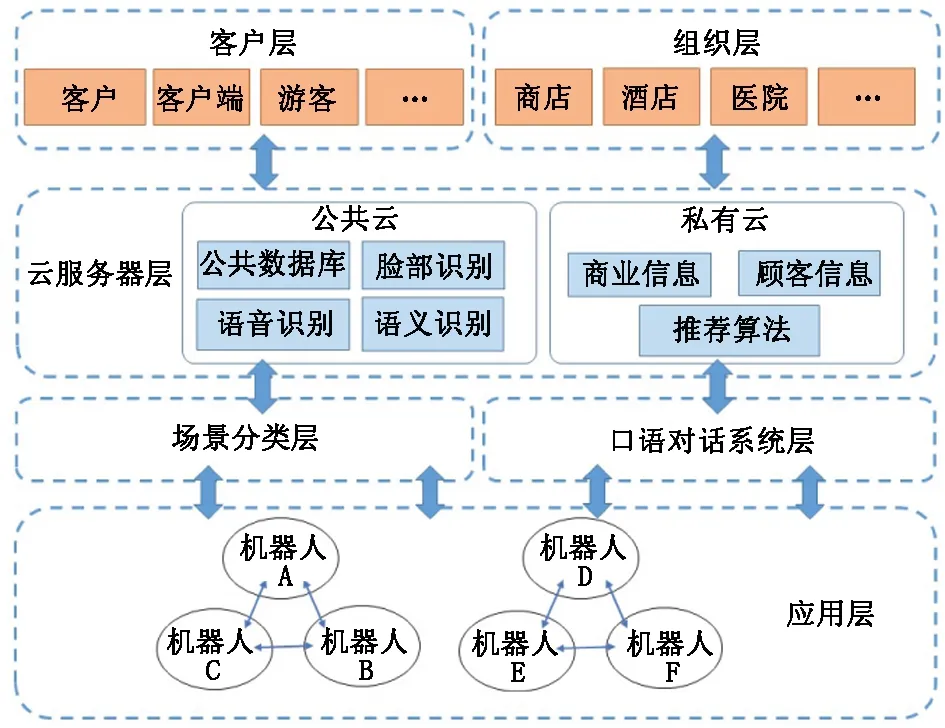
图1 多机器人协同系统结构图
组织层包括企业、商店和酒店,以及为公众提供服务的医院和政府机构。客户端层是组织层的客户。应用场景分类层的功能是通过客户端与机器人之间的对话记录来区分对话场景。组织(机器人所有者)可以根据所属行业为机器人选择场景。例如,商店选择的交互场景是购物,酒店选择的交互场景是酒店。当对话场景确定后,机器人的交互状态将切换到相应的场景状态模式,提高语义识别程度,优化交互体验。应用层主要描述了那些机器人的协同方法。考虑到场景的分类,机器人会根据场景的知识库与客户进行沟通。机器人通过与其他机器人共享云数据库,保存客户的信息,包括客户的人脸或声纹,以及每次与客户交互的交互状态。例如,如果一个人与机器人A进行了交流,然后这个人遇到了机器人B。当机器人B在另一个地方识别到这个人的人脸或者声音信息时,机器人B会首先识别出这个人。机器人B会下载他与机器人A通信时生成的数据。在分析他和其他机器人的交互信息的基础上与他展开对话。
为了清晰描述数据在机器人之间的传递和状态的继承,本文提出的框架数据流程如图2所示。图中,顾客A分别与2个不同的机器人交流如何到达酒店。客户A首先与机器人B沟通。机器人B收到客户的问题,通过步骤B1和B2得到答案。最后,机器人B给出了客户A的答案,同时通过步骤D1和D2保存客户的口语对话状态和数据。一段时间后,客户A遇到了机器人C,机器人C获得机器人B的口语对话状态以及在识别到客户A身份ID后从云服务获得客户数据。机器人C立即知道客户要去酒店,即使客户没有告诉机器人C去酒店,机器人C会直接告诉客户怎么去酒店。这样缩短了客户端A获取目标信息的交互时间。交互信息共享机制是一种机器人与商家之间管理信息的一种机制。特别地,他为每个组织(商家)提供1个帐户和密码来管理他们的数据。组织(商家)可以直接管理他们的信息是公开的还是只对他们自己开放。同时,为了保证客户信息的安全和隐私,未经客户允许,客户的信息不会被保存。当机器人保存客户的面部数据时,他会尝试获得客户的许可,然后保存数据。公共云服务层一般是指Microsoft Azure、Amazon Web services等云服务,均包括很多API。通过调用这些API来获取人脸识别、语音识别等其它功能。云机器人不仅可以降低成本,还可以优化资源分配。私有云服务是存储和管理商家和客户的信息,通过机器人合作系统的配合为客户提供个性化的服务。当用户与机器人交互时,获得用户的许可后,将信息保存到云端,包括用户的身份ID、聊天记录、购物信息、位置等。同时,如果商家需要,还可以将商店中出售的商品、折扣促销信息、组织位置等信息保存在私有云中。在与客户沟通时,机器人可以根据客户的历史购买记录推荐相关产品或配件产品。如果机器人属于同一个商业圈(联盟),他们可以提出互补或相关的产品建议。

图2 多机器人协同框架工作流程图
2 对话状态跟踪器
多机器人协作是一项应用于机器人路径规划、搜索等其他领域的成熟技术。本文展示了多机器人协作在服务机器人中的应用。正如语音交互机器人是基于云服务的,也是云机器人的一种。他们的系统和数据库是共享的,因此机器人协作是会话状态的连接和继承。可以使用对话状态跟踪技术。早期口语对话系统使用提前制定的规则[10],这种技术的优点是,它不依赖于大量的数据来实现,只提供规则就可以不断改善,但它依赖于大量的人力且应用范围是非常狭窄的。随后,在对话状态跟踪中使用生成模型[11],通过对收集到的对话行为和潜在意图进行统计分析,可以得到上下文。与生成模型不同,对话状态跟踪的判别模型通过时间递归神经网络(RNN)中的长短期记忆(LSTM)选择性地保留交互语料库,提高了识别的准确性[12]。
首先,对固定场景建立特殊的场景模型。场景模型包含场景的独有特征,这些特征设置成像插槽一样。例如,机票购买的场景模型:对话状态列出并编码购票时间、购票号码、购票数量、购票地点,当客户查询购票信息时,机器人通过自动语音识别(ASR)识别购票信息,然后通过使用自然语言工具包(NLTK)(一种自然语言预处理方案)进行预处理生成的文本。机器人会根据设定的条件积极引导交互的询问问题,像插槽一样去填充场景模型所需的信息。因为机器人使用云操作系统,当客户端I与机器人A通信并离开时,交互不会消失,而是挂起(保存)并绑定到客户的ID。所以当客户I再次和机器人对话时,即使不是机器人A,假设是机器人B,那么机器人B就可以读取上次客户I和机器人A的数据并继续对话。
3 个性化数据库架构
本文提出的框架涉及到私有云中的许多不同信息,包括来自组织者例如商场、酒店、银行等和用户的信息。在隐私安全越来越受到重视的时代,如何做好个性化服务和信息安全是一个巨大的考验。本文所述的系统将根据对应用户的信息分别管理和存储在每个组织者知识库中,每个组织都有自己唯一的账号和密码管理,与此同时,系统都有自己的客户(组织者)操作终端,移动电话应用操作终端,可以随时上传和更新数据。这个知识库的架构如图3所示。图中,以酒店及商场的个性化知识构建为例,有3种方法可以为数据源构建知识库。第1种方式是组织者使用终端(APP、Web)编辑和上传私有数据;第2种方法是从公有云服务导入通用数据。这2种方法可以准确的添加大量的数据,但是也有不足之处。第1种缺乏效率,第2种缺乏时效性。第3种是收集大量机器人和客户的交互数据,包括分词后词向量表达和词性标注,然后利用深度神经网络(DNN)对数据进行训练和处理,最后将分析结果上传到云端。知识库中存储的数据主要基于服务数据,商户的信息是否可以被其他商户访问由信息提供者决定,从而保证商户信息隐私,提高客户服务水平。
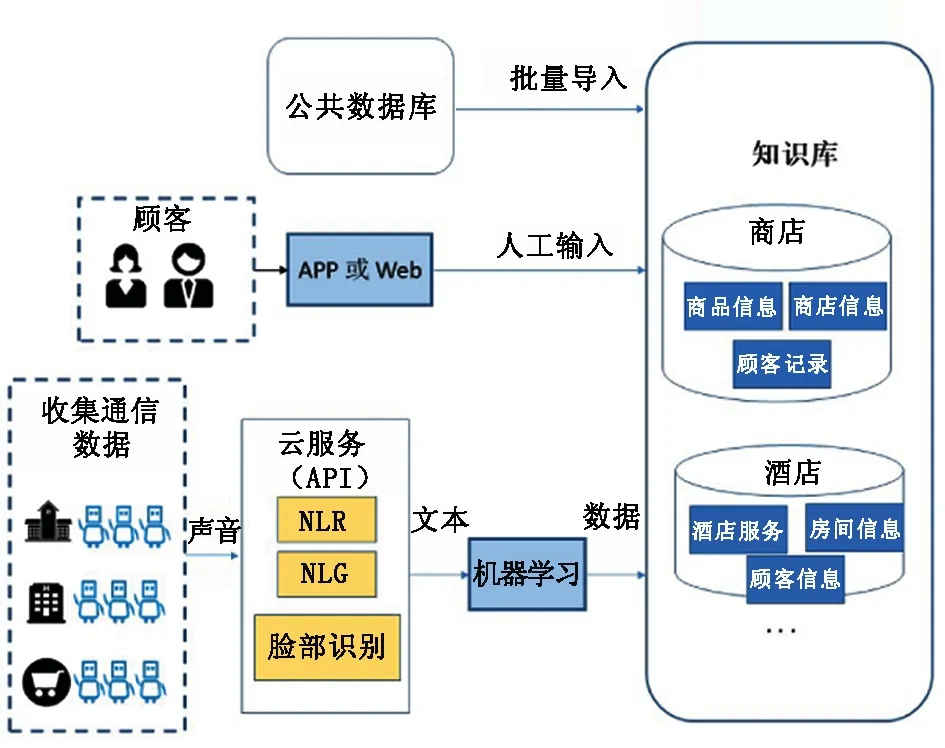
图3 构建知识库的工作流程
4 结束语
本文提出了一种基于多机器人协作方式的个性化客户服务系统,该系统有效地管理和使用了机器人信息、组织信息和客户信息,同时保护了客户和企业信息的隐私。在为客户提供个性化服务和个性化推荐的同时,也为企业节约了人力资源成本。同时,个性化知识库添加数据的方式有3种,为组织开展大数据分析提供有针对性的、实时的高数据源,为了解客户和升级服务奠定了基础。对话状态跟踪技术将机器人协作的方法应用于语音交互服务领域,使客户体验到不间断的交互环境。这种互动将完全与最后的互动相联系,在一定程度上消除了顾客与机器人之间机械的和不协调的互动感。虽然机器人的语音识别正确率仍然不高,而且只是暂时支持在会场等嘈杂场所进行单人对话。在未来,我们将尝试设计机器人与多个交互对象交互,这样机器人就可以同时与一群人交互。
