电解电容视觉定位算法研究
2020-05-30朱晓凡严国平
朱晓凡, 严国平, 钟 飞, 黄 振
(湖北工业大学机械工程学院, 湖北 武汉 430068)
电容装箱过程中,计算机通过分析摄像机拍摄的电容图像获取电容的位置及角度,这一过程被称之为特征识别和提取。图像识别算法包括模板匹配法、相关法、几何不变矩和投影法[1]。模板匹配法是建立一个目标物的特征库,然后用模板遍历被搜索图,找出相关度最高的位置。数字图像相关法是一种非接触,用于全场形状、变形、运动测量的计算机视觉技术。不变矩是根据图像图形特性来辨别图像特征的一种方法,其概念由M.K.Hu在1961年首先提出[2]。Hu不变矩是图像的一种统计特征,因其具有平移、旋转与比例不变性而被广泛应用于图像识别领域。投影法是将图像中高维信息用低维信息来表示,能够简单快速地提取图像特征[3]。其中,模板匹配能够寻找复杂单一的特征,但是计算量大;投影法适用于简单的特征查找,计算量小;Hu不变矩计算量小,且能够获取多种集合特征,适用于简单物体的识别。本文采用Hu不变矩来识别电容的中心位置和倾斜角度。
1 机器视觉系统结构
电容装箱流程分解为上料、装盘、振平、引脚校形、开箱、取托盘、装箱与封箱等8个步骤[4],其机械结构如图1所示。
机器视觉系统主要由传送带、装盘机器人、工业相机和计算机组成,其系统组成结构如图2所示。
电容加工完成后,从下料口散落在传送带上,传送带将电容运送到另一端的识别区,相机给电容拍照,拍摄的内容传递给采集卡作处理,然后由计算机计算出电容的位置角度及针脚朝向,再将电容位置信息传递给机械手控制器,控制器控制机械手吸取电容到电容托盘中。排列好的电容如图3所示。
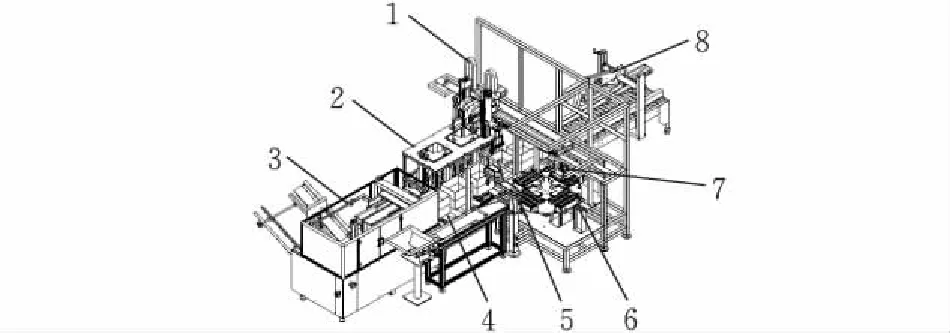
1-电容装箱机械手;2-储料器;3-开箱机;4-电容上料皮带; 5-电容装盘机器人;6-电容装盘;7-针脚梯形机;8-封箱机图 1 电容装箱生产线

图 2 视觉系统结构
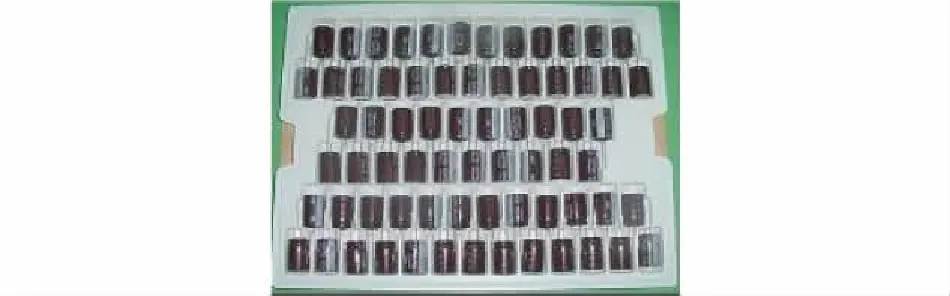
图 3 电容托盘
2 电容特征识别
2.1 电容图像预处理
电容在传送带的形态如图4所示。挡板将电容约束在传送带中部,保证电容各部分都在拍摄范围之中。传送带背部有光源,使电容与背景的区分更加明显。

图 4 传送带上的电容
为获取单个电容在整张图像中的位置,需要消除无关因素的干扰,同时将电容分割为独立的部分。对电容作以下处理[5-7]:将三通道的图像转化为单通道的灰度图,进行中值滤波与二值化,腐蚀去除电容之间的粘连和针脚重叠,并将电容分割为独立的个体,生成连通域,进行面积选择,并剔除不符合的区域(图5)。
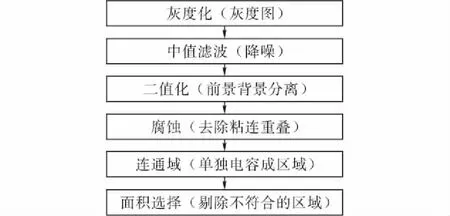
图 5 预处理流程图
工业相机拍摄的照片为三通道图。该图像不便于计算机计算(计算速度慢),所以需要将图像灰度化,其处理公式
(1)
式中:fi,j为灰度化后(i,j)点的灰度值,Ri,j、Gi,j、Bi,j分别为(i,j)处红、绿、蓝分量的值。图像背景中的噪音会影响识别效果,需要将灰度图进行滤波降噪处理。滤波的常用方法有均值滤波、中值滤波和高斯滤波,其滤波效果如图6所示。
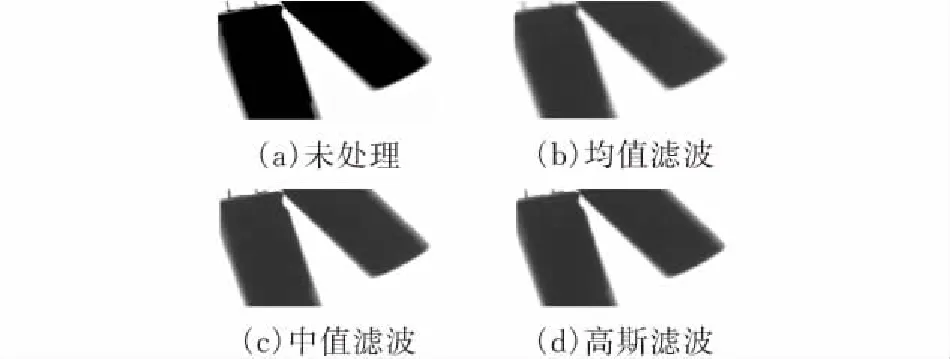
图 6 滤波效果
由图6可知,虽然三种滤波方式的降噪效果相同,但是中值滤波的对边缘保留的效果最佳。
为将电容从背景中分割出来,需将图片进行二值化,即将大于阈值的灰度值设为1,小于或等于阈值的灰度值设为0:
(2)
式中:gi,j为二值化后的值,fi,j为原灰度值,k为阈值。二值化后的图像如图7所示。
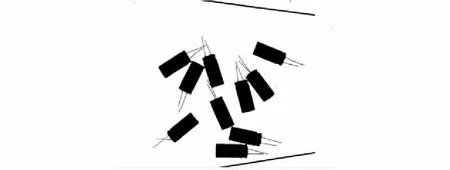
图 7 电容图像二值化
将电容从背景中分离出来之后,所有电容为一个整体,需要将单个电容分离出来。由图7可知,电容与电容之间有重叠与粘连,不易通过连通域将其分离,在操作之前需要对电容进行腐蚀操作。

图 8 腐蚀示意图
如图8所示,以矩形结构元遍历整个区域,如果结构元与该像素点及周围像素完全重合,则保留该点,否则,抛弃该点。经过腐蚀操作,区域范围变小,边缘回缩,电容粘连和交叉的部分被分离。电容腐蚀后的效果如图9所示。

图 9 腐蚀效果图
腐蚀操作过后,电容之间连接的部分被分离开来,方便单个电容的识别。电容的针脚特征在腐蚀操作中丢失,但是可以通过电容针脚端的缺口特征来识别电容的朝向。
单个像素周围的8个像素单元称为八邻域(图10)。
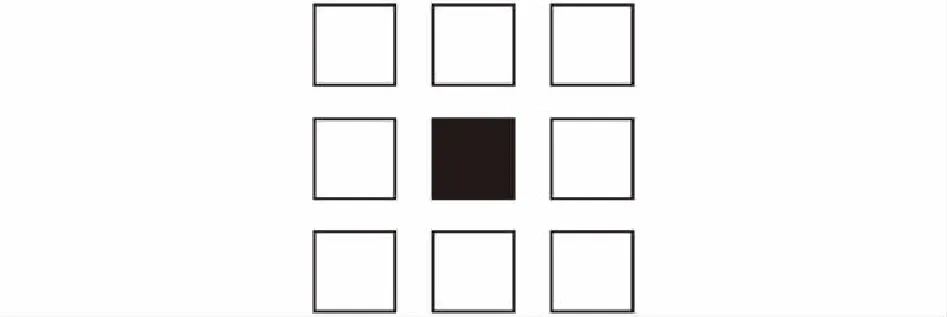
图10 八邻域
通过遍历所有像素点的八邻域,若八邻域中有像素点,则认为该点和中心点连通。遍历所有的像素点,并标记所有连通域。
通过以上处理,得到图11所示的电容区域图,不同的区域以不同的颜色显示。在预处理过程中,每个电容各自区域的位置被找出,求解电容的位置角度需遍历所有电容区域,求解每个区域中电容的中心位置和倾角。

图11 电容区域图
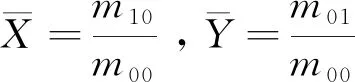
2.2 电容位置及倾角计算
由于电容针脚端有缺口,电容图片的质心和外接矩形的中心不重合。在抓取过程中,机器手的真空吸盘应该吸取电容重心处。由于电容针脚有质量,电容的重心与电容区域图的外接矩形中心近似重合,故将电容区域图的外接矩形中心作为抓取点。
(3)
式中:x、y为像素点的坐标;M、N为图像的高与宽;f(x,y)为该点的灰度值。
图像的零阶矩代表被测对象的面积,一阶矩表示被测对象的质心,二阶矩代表其方向[9]。
(4)
式中mpq为图像的(p+q)阶矩。
对于一个二值化后的图像,式(4)可改写为:
(5)
由上可知,m00表示为待测物体的面积,离散的图像中心距
(6)
将式(6)进行归一化,得到归一化的中心距
(7)

对其求二阶矩,得到待检测物体的偏转角度
(8)
通过求取电容区域最小外接矩形的一阶矩,获取电容的中心位置;通过外接矩形的二阶矩获取电容的倾角;遍历所有电容区域,可以获得整张图片上所有电容的中心位置和倾角。
2.3 电容针脚朝向识别
由电容轮廓(图12)可知,电容的针脚端有两个小缺口,识别出缺口的方向即识别出电容针脚的方向。

图12 电容轮廓
由于电容的针脚朝向未知,通过电容图像的二阶矩获取电容的倾斜角度φ之后,电容旋转至水平角度为φ或-(180°-φ)。由式(3)可知,带缺口的电容图像的质心会远离缺口端。如图13所示,将带缺口的电容图像旋转φ之后至水平,分别求取电容外接矩形的中心和带缺口图像的质心,会有图13a和图13b两种情况,即质心在中心左侧和质心在中心右侧。若质心在中心左侧,则电容的待旋转角度为φ;若质心在中心右侧,电容的待旋转角度为-(180°-φ)。

图13 电解电容针脚朝向识别流程
3 实验测试
根据以上方法,编写Halcon程序,其结果如图14所示。本方法正确识别了所有电容的位置、角度与针脚朝向,运行时间为748.219 ms,识别速度与精度到达工业要求。

图14 电容位置角度识别结果
在手眼标定之后,世界坐标系与相机坐标系一一映射,计算机将图像中的坐标值转化为机械手的坐标[10]。实验结果见表1,其中,旋转角度的正负代表机械手旋转的方向,其旋转角度总是小于180°。
视觉系统识别到电容位置姿态后,机械手开始抓取电容。电容被抓取后,相机重新拍照,计算传送带上电容新的位置角度,即在机械手抓取过程中,计算机计算电容位置,节省单个电容识别抓取的时间。识别抓取单个电容所需的时间平均为1 s。
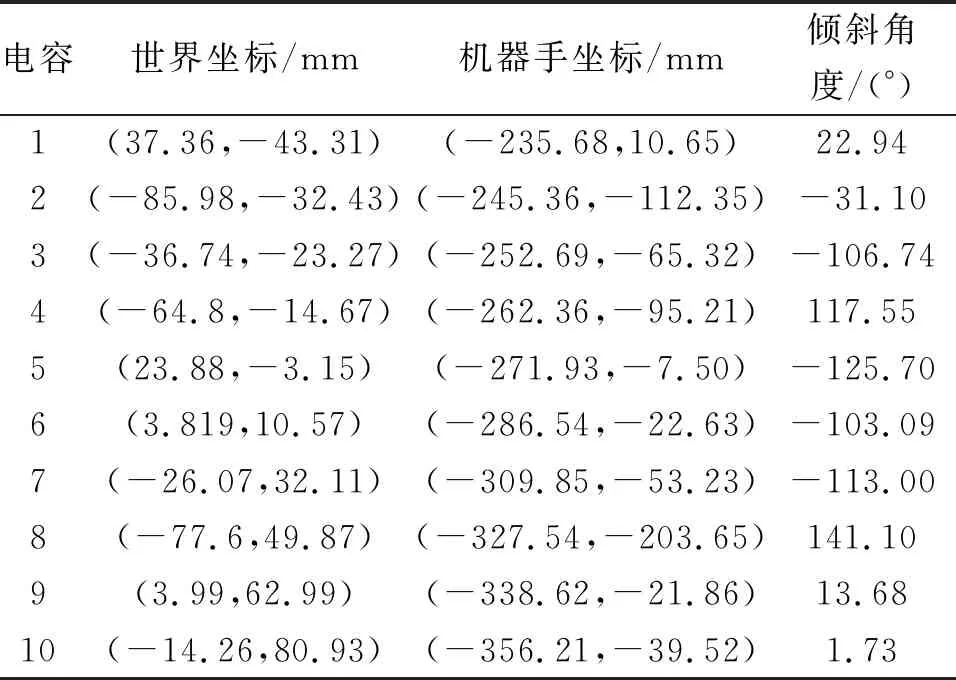
表1 电容位置信息
4 结论
1)运用图像的二阶矩求解电容图像的中心和倾角的方法精度较高,满足工业抓取电容的要求。
2)电容针脚朝向的识别可采用模板匹配的方法,但是此方法计算量大,且稳定性不好。但是用电容针脚端的缺口特征代替针脚,运用电容图像质心与外接矩形中心的差求解针脚朝向的方法计算量小,稳定性高,运行时间短,缩短了单个电容抓取的时间。
3)经实验测试,电容位置角度识别时间为748 ms,平均抓取时间为1 s,而人工抓取时间平均2 s。机器人抓取效率远远高于人工。
