3-RPS并联隔振平台的建模与控制
2020-05-28孙政赵强王娜秦玉彬
孙政 赵强 王娜 秦玉彬
摘 要:针对传统被动隔振装置隔振效果较差、使用寿命较短的问题,本文以3-RPS并联机构为主体建立并联隔振平台,通过拉格朗日法求解并联隔振平台系统动力学方程,在Matlab/Simulink中设计基于天棚模型的半主动on-off控制器。为解决并联机构系统模型存在非线性化和理想化等问题,应用Sim Mechanics建立并联隔振平台系统物理模型,通过对并联隔振平台单个支链分别进行on-off控制,提高隔振平台的隔振性能。仿真结果表明:相比于被动隔振平台,含有on-off控制器的隔振平台可以有效抑制振幅,具有良好的隔振效果。
关键词:并联机构;隔振平台;天棚模型;on-off控制
Abstract:Aiming at the problems of poor vibration isolation effect and short service life of traditional passive vibration isolation device, this paper takes 3-RPS parallel mechanism as the main body to establish a parallel vibration isolation platform, solves the system dynamics equation of the parallel vibration isolation platform by Lagrange method, and designs a semi-active on-off controller based on canopy model in Matlab/Simulink. Due to the lack of nonlinearity and idealization of the parallel mechanism system model, this paper established a physical model of the parallel vibration isolation platform system based on SimMechanics, and improved the vibration isolation performance of the parallel vibration isolation platform through on-off control of a single branch chain of the parallel vibration isolation platform. The simulation results show that compared with the passive vibration isolation platform, the vibration isolation platform with on-off controller can effectively suppress the amplitude and has good vibration isolation effect.
Keywords:Parallel mechanism; vibration isolation platform; skyhook model; on-off control
0 引言
降低振动对各类机械设备的冲击,延长设备使用寿命,提高设备运转平顺性是当今研究的一大热点[1-2]。目前,采用传统橡胶或特殊塑料等弹性元件进行隔振的方式,已经不能满足高精密、高运转的机械设备对隔振的需求,且橡胶和塑料易老化、技术性能指标较差、使用寿命较短、隔振效果较差且仅能实现单维隔振[3]。因此,本文以并联机构为隔振平台主体,设计了并联隔振平台。并联机构是由多个并联支链组成的闭环运动机构,具有刚度大、运动惯量小、负载能力强和结构稳定等优点[4-6],基于并联机构的隔振平台为多维隔振提供了一种新的解决方案。目前,国内外学者对并联机构用于多维隔振做了许多研究,LE等[7]利用两个对称负刚度弹簧并联一个正刚度弹簧的机构改善了汽车座椅的低频减振性能;许子红等[8]提出并联机构可用在多维隔振平台中;牛军川等[9]提出一种可变维数的并联机构,并用于救护车担架隔振;徐子瑜[10]将3-RPC并联机构用于车辆座椅的多维减振,提高了车辆座椅的乘坐舒适性。虽然并联机构用于多维隔振具有很多优点,但由于并联机构本身是一个过约束、非线性的耦合系统[11-13],其动力学模型推导复杂,如何建立一个并联隔振平台的控制仿真系统具有十分重要的意义。
SimMechanics建立在Simulink和Matlab之上,利用模块化的框图提供了一种控制器和控制对象系统的多物理域分析环境。利用Sim Mechanics可以快速建立3自由度并联隔振平台模型,整合磁流体组件,实现半主动控制,在控制算法仿真成功后,建立3自由度并联隔振平台的硬件在环仿真(HIL),缩短开发周期。
本文采用3-RPS并联机构作为隔振平台主体,使用Solid Works与Sim Mechanics联合仿真构造并联隔振平台的系统模型,使用Simulink建立并联隔振平台的控制系统模型,不仅解决了并联机构本身动力学模型推导的复杂性,更为并联机构的控制策略提供了一种新的可行方案。
1 3-RPS并联隔振平台模型及动力学分析
3-RPS机构是由Hunt[14]最早提出的,类似于3-PRS,可实现沿z轴的平动、沿x轴和y轴方向的转动,是一种新型的一平动两转动的并联机构,该机构具有较好的重构能力及运动灵活性,是搭建隔振平台较为理想的并联机构。
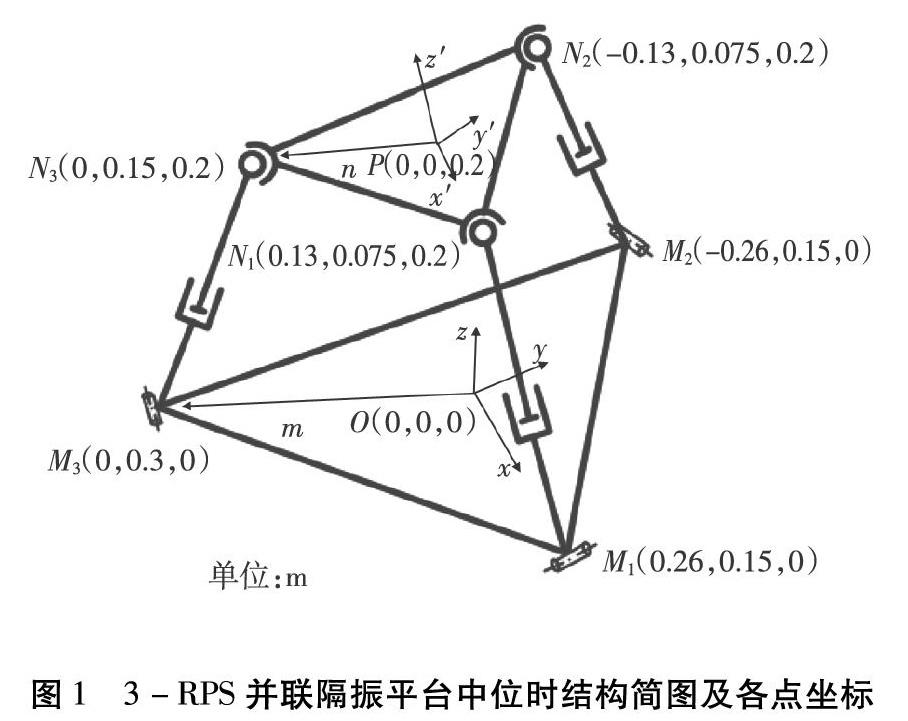
基于3-RPS并联机构优良的性能,本文采用该机构作为隔振平台的主体结构,使用弹性阻尼器件作为系统减震装置。3-RPS并联隔振平台模型简图及中位时各点坐标如图1所示,该装置由上平台(动平台)N1N2N3、下平台(定平台)M1M2M3以及连接上下平台的3条支链组成。上、下平台为等边三角形,令其外接圓半径分别为n、m,上、下平台的几何中心为P、O。支链的构成为RPS结构,即自下平台至上平台依次为转动副R、移动副P、球副S。
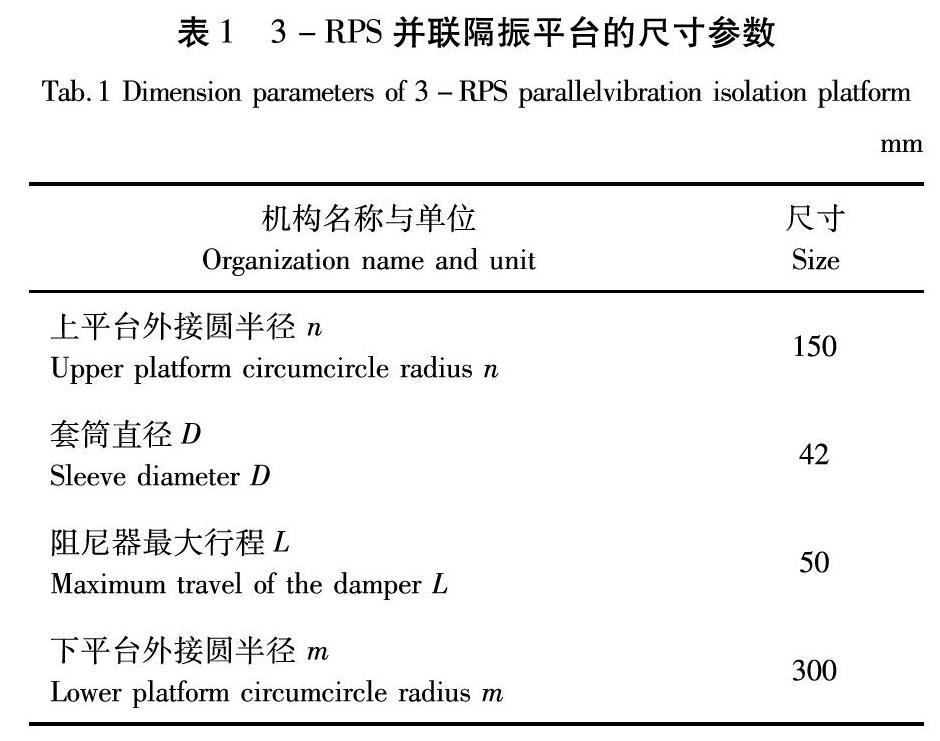
通过驱动移动副做平移运动,可实现上平台沿z轴的平动,在球铰的作用下,亦可实现上平台沿x轴和y轴方向的转动。其中转动副的旋转轴与下平台在同一平面,且平行于下平台的对边。以下平台的几何中心建立基础坐标系O-xyz,连体坐标系P-xyz建立在上平台的几何中心。3-RPS并联隔振平台尺寸参数见表1。
2.2 模型转化
将Solid Works装配体模型转换成第二代Sim Mechanics模型需要以下几步。
(1)导出:在Matlab中安装Sim Mechanics Link插件, Solid Works装配体可通过Sim Mechanics Link输出Matlab可识别的XML文件以及储存装配体模型数据的STL文件。
(2)导入:通过Matlab中的‘smimport命令读取XML和STL文件信息,生成SXL文件和一个含有模型数据的M文件,此时,Sim Mechanics将装配体模型转换完成。
(3)调整:Sim Mechanics模型生成后,有时会出现铰链的识别错误,需要根据实际情况做一些适当的调整,以便于增加Sim Mechanics模型的准确性。最后,需要添加相应的世界坐标系、求解器等辅助模块,按照实际需求修改重力场方向,即可实现Solid Works与Sim Mechanics的联合仿真。
图4为Solid Works与Sim Mechanics模型转换关系图;图5为并联机构的Sim Mechanics模型图;图6为并联机构的Sim Mechanics单支链模型图。
3 天棚模型及on-off控制器的设计
天棚模型的作用是通过与惯性参考系(如天空)建立一种虚拟连接来降低有效载荷的绝对速度。如图7所示,该算法首先由Karnopp等[22]提出,在半主动悬架系统中予以应用。
天棚模型主要通过降低设备连接处的有效载荷达到控制效果,但有效载荷能通过并联机构的3自由度进行平移和旋转,因此最理想的方式是在每个自由度上分别建立一个天棚模型。但阻尼器只能沿轴向施加力,因此最佳的选择是求解沿阻尼器轴向载荷的绝对速度,对绝对速度应用天棚控制。假设每个阻尼器只转动一个很小的角度,即可将有效载荷的局部垂直速度作为天棚控制的控制对象。
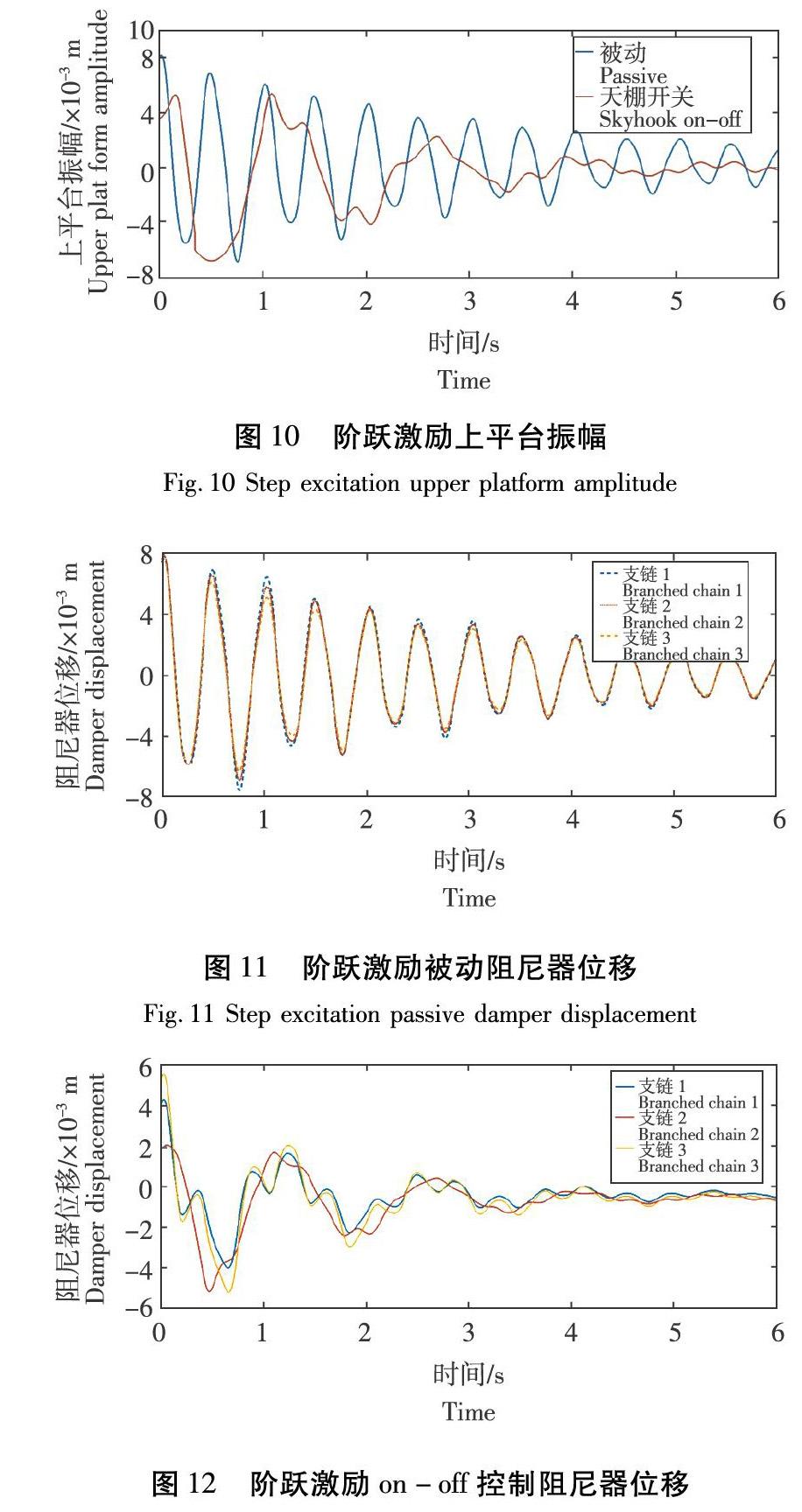
表3为阶跃位移激励下被动隔振与on-off控制下的半主动隔振平台性能指标的最大值比较,由表3可知,在on-off控制下上平台振幅、阻尼器位移、上平台加速度分别减小了24.85%、30.34%、55.8%。验证了本文设计的隔振平台与控制方法能够有效地降低振动的传递,具有较好的隔振性能。
5 结论
(1)针对传统被动隔振装置存在的问题,本文设计了一种基于3-RPS并联机构的半主动隔振平台,并利用拉格朗日法对机构进行了动力学分析。
(2)由于并联机构数学模型存在的非线性和理想化等不足,本文采用了Solid Works与Sim Mechanics联合仿真的方法建立了并联隔振平台系统模型,提高了建模效率,增加了模型准确度,为复杂机械系统建模仿真提供一种新的解决思路。
(3)运用on-off控制器对并联隔振平台进行控制,仿真结果表明,本文设计的on-off控制器具有较好的控制效果,与被动隔振相比,含有on-off控制器的平台振幅降低了24.85%、阻尼器位移行程降低了30.34%、上平台的加速度降低了55.8%,验证了本文中设计的on-off控制器有效性。
【参 考 文 献】
[1]李勇.基于少自由度并联机构的多维隔振研究[D].济南:山東大学,2014.
LI Y. Study of multi-dimensional vibration isolation based on limited-DOF parallel mechanism [D]. Jinan: Shandong University, 2014.
[2]李彦.基于磁流变阻尼器的半主动振动控制[D].北京:清华大学,2009.
LI Y. Semi-active vibration control based on MR damper[D]. Beijing: Tsinghua University, 2009.
[3]LI B, ZHAO W, DENG Z Q. Modeling and analysis of a multi-dimensional vibration isolator based on the parallel mechanism[J]. Journal of Manufacturing Systems, 2012, 31(1): 50-58.
[4]落海伟,张俊,王辉,等.3-RPS并联机构弹性动力学建模方法[J].机器人,2014,36(6):737-743.
LUO H W, ZHANG J, WANG H, et al. An elastodynamic modeling method for a 3-RPS parallel kinematic machine [J]. Robot, 2014, 36(6): 737-743.
[5]杨春梅,南超,马岩,等.基于Hypermesh联合LS-DYNA的小径木采伐机构动力学分析[J].林业机械与木工设备,2018,46(7):34-37.
YANG C M,NAN,C,MA Y,et al.Kinetic Analysis of Small-diameter Tree Logging Mechanism Based on Hypermesh&LS-DYNA[J].Forestry Machinery & Woodworking Equipment,2018,46(7):34-37.
[6]朱伟,马履中,吴伟光,等.基于三平移并联机构的三维减振平台建模与仿真[J].农业机械学报,2008,39(1):142-146.
ZHU W, MA L Z, WU W G, et al. Modeling and simulation analysis on multi-dimensional damping platform base on three-translation parallel mechanism [J]. Transactions of the Chinese Society of Agricultural Machinery, 2008, 39(1): 142-146.
[7]LE T D, AHN K K. A vibration isolation system in low frequency excitation region using negative stiffness structure for vehicle seat [J]. Journal of Sound and Vibration, 2011, 330(26): 6311-6335.
[8]许子红,马履中,刘庆波,等.并联机构在多维减振平台中的应用研究[J].机械设计与制造,2007,27(11):124-126.
XU Z H, MA L Z, LIU Q B, et al. Application study of parallel mechanism for vibration reduction[J]. Machinery Design & Manufacture, 2007,27(11): 124-126.
[9]牛军川,宋孔杰.多激励多支承全柔性隔振系统的传递特性分析[J].机械工程学报,2011,47(7):59-64.
NIU J C, SONG K J. Transmission characteristics of fully flexible isolation systems subjected to multi-excitations and supported by multi-mounts [J]. Journal of Mechanical Engineering, 2011, 47(7): 59-64.
[10]徐子瑜.基于并联机构的车辆座椅多维减振装置设计研究[D].天津:天津大学,2013.
XUN Z Y. Design of multi-dimensional vibration damping device of vehicle seat based on parallel mechanism[D]. Tianjin: Tianjin University, 2013.
[11]丛爽,尚伟伟.并联机器人:建模、控制优化与应用[M].北京:电子工业出版社,2010.
CONG S, SHANG W W. Parallel robots: modeling control optimization and application[M]. Beijing: Electronic Industry Press, 2010.
[12]赵强,阎绍泽.双端虎克铰型六自由度并联机构的动力学模型[J].清华大学学报(自然科学版),2005,45(5):610-613.
ZHAO Q, YAN S Z. Dynamic model of a 6-DOF parallel mechanism with Hookes joints at both chain ends[J]. Journal of Tsinghua University (Science and Technology), 2005, 45(5): 610-613.
[13]TANNER E T. Combined shock and vibration isolation through the self-powered, semi-active control of a magneto-rheological damper in parallel with an air spring[D]. United States of America: Virginia Polytechnic Institute and State University, 2003.
[14]HUNT K H. Kinematic geometry of mechanisms[ M].New York: Oxford University Press, 1978.
[15]李志斌,董旭明,鐘德永.基于SimMechanics的三自由度并联机器人仿真[J].工业控制计算机,2012,25(8):88-90.
LI Z B, DONG X M, ZHONG D Y. Motion simulation of 3-DOF parallel robot based on SimMechanics[J]. Industrial Control Computer, 2012, 25(8): 88-90.
[16]卢青,王子平.3T2R新型混联茶叶筛分机机构设计及筛分性能仿真[J].林业机械与木工设备,2018,46(5):34-40.
LU Q, WANG Z P. Design and performance simulation of 3T2R hybrid tea sieving mechanism[J]. Forestry Machinery & Woodworking Equipment, 2018, 46(5):34-40.
[17]张国梁,蔡小娜,孙照斌,等.耙辊式纤维板铺装成型机构设计及运动仿真[J].林业机械与木工设备,2017,45(5):22-25.
ZHANG G L,CAI X N,SUN Z B,et al.Rake-Rolling Fiberboard Forming Mechanism Design and Motion Simulation[J].Forestry Machinery & Woodworking Equipment,2017,45(5):22-25.
[18]DASGUPTA B, MRUTHYUNJAYA T S. Closed-form dynamic equations of the general Stewart platform through the Newton–Euler approach [J]. Mechanism and Machine Theory, 1998, 33(7): 993-1012.
[19]JAZAR R N. Theory of applied robotics: kinematics, dynamics, and control[M]. New York: Springer Publishing Company, Incorporated, 2010.
[20]ZIPPO A, FERRARI G, AMABILI M, et al. Active vibration control of a composite sandwich plate[J]. Composite Structures, 2014, 128: 100-114.
[21]孫坚, 丁永生,郝矿荣.基于SimMechanics的新型并联机构仿真平台[J].计算机仿真,2010,27(1):181-184.
SUN J, DING Y S, HAO K R. A SimMechanics based simulation platform for a novel parallel manipulator [J]. Computer Simulation, 2010, 27(1): 181-184.
[22]KARNOPP D C, CROSBY M J, HARWOOD R A. Vibration control using semi-active fore generators[J]. Transaction of The ASME Journal of Engineering for Industry, 1975, 96(2): 619-626.
