基于探地雷达对粗根的识别技术研究
2020-05-28王明凯李文彬文剑
王明凯 李文彬 文剑
摘 要:在探地雷达对地下粗根进行检测和识别的过程中,许多因素会干扰和影响根识别的分辨率。针对此问题,本研究首先通过Gpr Max正演对树木根系进行模拟仿真,模拟检测根系过程中的3种主要影响因素,即不同根径、根的不同埋藏深度和不同雷达扫描角度,并讨论3种因素对探地雷达检测根系的影响。其次将正演实验与现场实验作对比,证实正演模拟的有效性和可行性。结果表明:在雷达扫描角度大于45°时,直径大于5 mm且埋藏深度较浅的粗根容易被检测到。这些结果证实了根径、根深和雷达扫描角度是影响探地雷达进行根系检测的重要因素,此外,其分析结果可提高雷达波树木根系无损检测的准确性和测试精度。
关键词:探地雷达;粗根;Gpr Max;根径;根深;雷达扫描角度
Abstract:In the process of detecting and identifying underground coarse roots by ground-penetrating radar (GPR), many factors will interfere and affect the resolution of root recognition. To solve this problem, the study firstly simulated tree roots through GprMax forward modeling, and simulated three main influencing factors in root detection, namely, different root diameters, different buried depths of roots and different radar scanning angles, then discussed the influence of three factors on root detection. Secondly, the forward simulation experiment and field experiment are compared to verify the effectiveness and feasibility of forward simulation. We found that the coarse root with a diameter of more than 5 mm and a shallow burial depth are easy to be detected when the scanning angle of radar is greater than 45°. These results confirmed that the diameter of root, the depth of root, and the scanning angle of radar were important influence factors for root detection, in addition, the results can improve the accuracy and precision of the NDT of tree root system.
Keywords:Ground-penetrating radar (GPR); coarse root; GprMax; root diameter; root depth; radar scanning angle
0 引言
根系按形態学和功能上的区别被划分为细根(fine root)和粗根(coarse root),一般认为粗根直径在 5 mm 以上。粗根在植物功能和陆地生态系统中起着至关重要的作用,因此检测和量化粗根的大小、结构和生物量是非常重要的[1]。高效无损的原位定量化探测和研究根系的形态、功能结构与分布特征有助于认识树木的生长发育规律,提高资源利用率,可以为根系生物学、林学和地下生态学提供必要的数据准备和理论依据[2]。传统的根系检测和研究多采用开挖法、剖面法和钻芯采样[3-5]。这类方法相对准确,但费时费力,对于根系的破坏性大,不适用于活立木,无法进行重复测量且属于点观测。探地雷达(ground-penetrating radar, GPR)作为一种高效无损的地球物理学技术被广泛应用于物探领域的探测、成像和特征识别,其基本原理是:利用电磁波在遇到具有不同介电常数的两种物质界面时会发生不同反射这一特点,来估计地下目标分布特征[6]。
探地雷达自20世纪 90 年代应用到根系测量上, 国内外学者相继使用GPR对植物根系展开广泛的研究,在根径检测[7]、生物量检测[8-10]、根系形态制图[11]以及三维重构等[12-15]方面,从理论和实验中取得了显著的成果。Butnor等[6]首先将GPR应用在根系生物量的检测,并预测了40 cm深度火炬松与雷达反射率的相关系数。Conyers等[16]自1999年以来,对粗根进行了检测、定位、根径和生物量估算的试验。然而,在不同的研究中出现了相互矛盾的结论[17-18],并认识到探地雷达检测粗根的一些局限性。在以往的研究中,根系生物量主要是根据雷达反射率相关的指标(阈值范围内的面积、反射器计数和在阈值范围内的像素)推测。但由于根系含水量对雷达波反射率的影响,根系生物量的估算一直是存在问题的。Hirano等[17]在2009年得出结论:在根系和土壤含水量未知的情况下,不能使用单频率的GPR来精确估计根系的生物量。Dannoura等[19]在可控条件下用GPR检测日本柳杉的树根,并基于雷达反射波形的参数分析了影响根定位和识别的因素。Wu等[20]在Tanikawa等[21] 的基础上研究了根方向对探地雷达根系探测精度和根系直径估算精度的影响,发现横切线与根方向之间的振幅面积与交角的变化符合正弦波形,但与Tanikawa等[21]的研究发现存在差别,因此在根方向存在的情况下,对基于GPR的根直径估计的影响仍有待研究。
基于上述研究分析可知,粗根的定位与识别受到诸多因素(根的含水量、根径、根的位置和根的方向)的影响[22]。本研究的目的有两方面:①Gpr Max正演实验模拟探地雷达对粗根识别的影响因素;②正演模拟实验与现场实验作对比。
1 实验场地与方法
1.1 实验场地
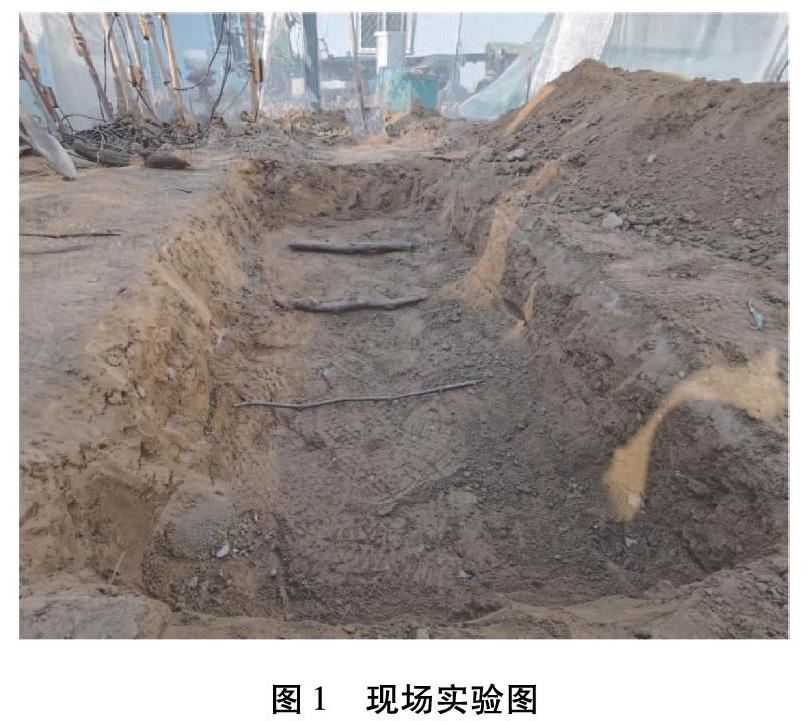
实验场地位于北京市海淀区北京林业大学附近的金工厂(40°29″N~116°20′27″E),属温带大陆性季风气候,四季分明。该实验选择葡萄藤模拟粗根的检测。研究区域地表主要为固定沙丘,土壤类型主要为细沙(图1)。自然细沙的介电常数与土壤接近,且物理性质均一,易于模拟,可避免探地雷达反射图像形成团块和空洞。实验期间未发生降雨,土壤含水量稳定适于探地雷达探测。
1.2 研究方法
1.2.1探地雷达成像
探地雷达也称地质雷达,常用的测量方法有反射方式的剖面法、透射法和共中心法,在粗根的检测中主要采用的是剖面法。探地雷达以宽频带短脉冲形式,由地面通过天线T送入地下,经地下地层或目的体反射后返回地面,被另一个天线R所接收,如图2所示。脉冲波行程需要时间为[23]:
公式中x在剖面检测中是固定的,当x远小于目标体距地表的深度时,公式(2)可简化为z=vt/2。v可以用宽角方式或其他方式测量,当土壤的导电率很低时,可以根据v≈c/εr近似算出,其中,c為光速(c=0.3 m/ns);εr为土壤的相对介电常数值,可利用现成数据或测定获得。
粗根的雷达图形常以脉冲反射波的波形形式记录。波形的正负峰分别以黑、白色表示,或者以灰阶或彩色表示。这样,同相轴或等灰度、等色线即可形象地表征出地下反射面,即形成U形的双曲线,这是检测粗根的重要依据之一。图3为目标回波双曲线形成的示意图。
1.2.2 雷达探测数据预处理
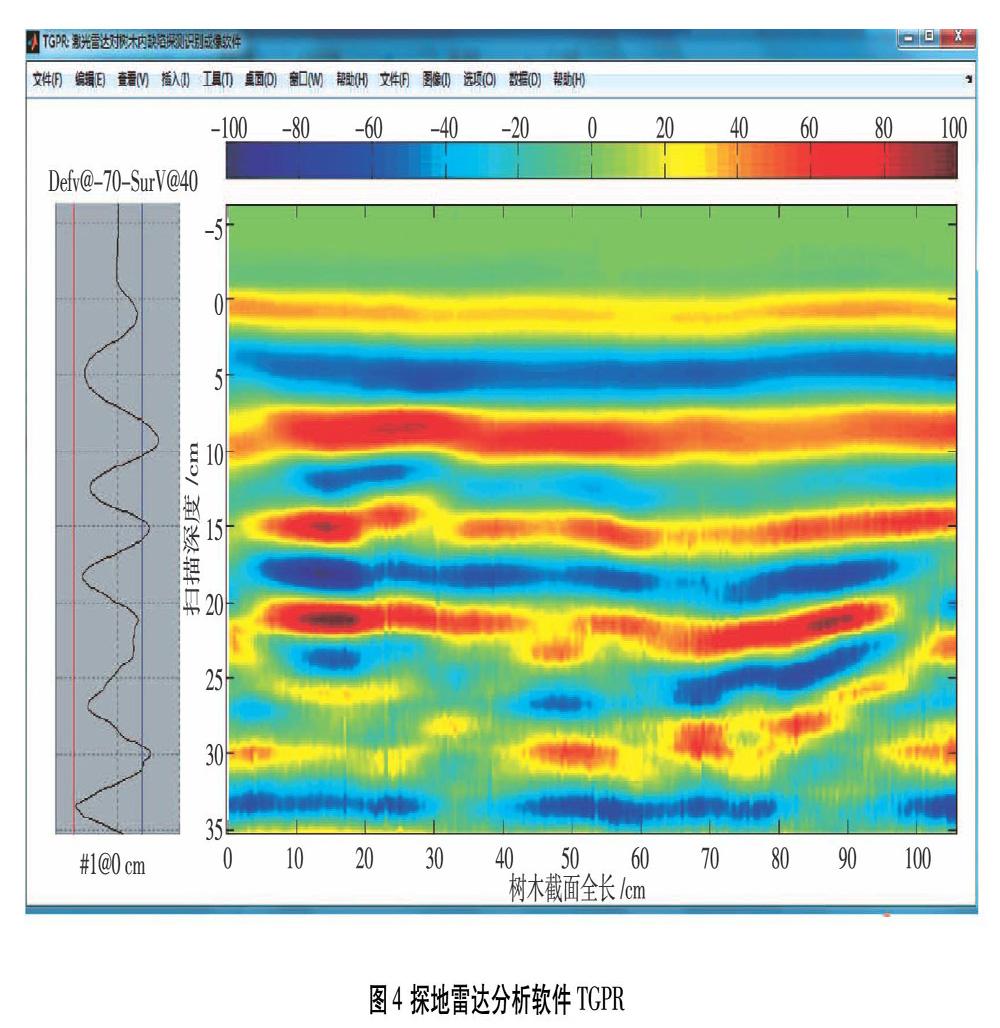
探地雷达发射天线发射的脉冲电磁波在地下传播,在介质界面处发生反射、透射、散射、绕射及衰减。天线接收的电磁波反射信号记录,既包括外界的随机噪声,又含有地面及空中物体反射引起的各种相干噪声[18]。因此,必须按一定流程对探地雷达数据进行预处理。雷达回波数据前期预处理主要采用的方法有零线确定、振幅处理和背景噪声去除。本课题研究数据处理使用的是自主研发的树木雷达分析系统软件TGPR[24],如图4所示。
2 结果与分析
2.1 Gpr Max正演模拟
本文的正演实验使用的是基于FDTD原理的Gpr Max软件,Gpr Max内置的介质free_space来模拟空气层,其厚度为30 mm,将模拟天线置于空气层内[23],模拟探地雷达对土壤中粗根的检测。正演模拟中介质层的参数见表1。表1中包括各介质的相对介电常数(εr)和电导率(σ)、模型的网格步长、激励源类型以及雷达天线移动步长,εr为相对介电常数,σ为电导率,其余参数在对应模型中列出。
2.1.1 不同直径对粗根识别的影响
为了研究不同直径对粗根识别的影响,构建了一个8 m×1 m的正演模型(图5)。在其中放入8个根,直径分别为0.015 4、0.03、0.024、 0.018、0.015、0.01、0.006 4、 0.004 m,深度0.5 m。天线中心频率900 MHz。天线沿水平方向匀速移动,图5黑色矩形模拟Gpr Max内置的空气介质层,共采集数据390道,间距为0.02 m,每道采样时间t=30 ns。根据仿真模型得到目标体散射数据的B-scan如图6所示。
由图5可以看出,最粗的根和最细的根分别位于第2和第8个位置,在图6所对应的B-scan图中,直径为30 mm的根雷达剖面双曲线最清晰,而直径为4 mm的根的剖面双曲线几乎分辨不出来。
正演模拟结果表明根径越大,雷达反射波振幅越强,B-scan图像越清晰。而且在雷达频率为900 MHz的情况下,探地雷达能够检测出根径大于5 mm的根样本,也就是粗根。
2.1.2 不同深度对粗根识别的影响
为了研究不同埋藏深度对粗根识别的影响,在8 m×1 m的正演模型中(图7),在其中放入8个根,根径都是0.01 m,深度从0.1 m到0.8 m,间隔为0.1 m。天线中心频率900 MHz。天线移动步长0.02 m,共采集390道数据,每道采样时间t=30 ns。根据仿真模型得到目标体散射数据的B-scan,如图8所示。
由图8可以明显看出,0.1 m处的根反射强度最强。随着深度的增加,雷达信号减弱,雷达剖面双曲线越来越模糊。从理论上来讲,由于电磁波在地下传播会逐渐衰减,雷达在更深处的反射信号会无法分辨。正演模拟实验比实际土壤情况要理想很多,因此雷达信号在0.8 m深度依然有清晰可辨的反射双曲线。一般情况下,在雷达频率为900 MHz时,探地雷达的最佳检测深度为0.6 m。
2.1.3 不同扫描角度对粗根识别的影响
以上情况都是假设雷达扫描方向与根的伸展方向垂直,天线的极化方向与根的伸展方向平行,但根系在地下的生长极其复杂,在三维方向上交错纵横。因此在探地雷达识别地下根系过程中,根系的倾角也会影响识别精度。根系的倾角包括水平倾角和垂直倾角,由于垂直倾角比较复杂,本研究先考虑水平倾角的影响,即探地雷达的扫描角度(图9)。根径为0.01 m,天线中心频率为900 MHz,探地雷达分别以75°、60°、45°、30°、15°扫描角度匀速移动,得到结果见表2。
由表2可以看出,随着探地雷达扫描角度减小,粗根剖面双曲线顶部逐渐平缓。在理论层面上,当扫描角度小于45°时,粗根回波双曲线无法分辨[21]。在埋藏深度理想的前提下,探地雷达可以清晰分辨水平倾角大于45°的粗根。
2.2 现场实验
為了证实Gpr Max正演软件模拟探地雷达探测粗根的有效性和可行性。通过对实地埋藏根系进行检测识别,并设置了3组实验(图10)。其中土壤的介电常数在表3中给出。
实验一:不同根径影响因素实验。为分析不同根径对雷达检测效果的影响,在长、宽、高分别为2、1、0.5 m的沟壑中放置3根葡萄藤,直径分别为0.005、0.02、0.04 m。相对介电常数分别为20.23、15.43、11.21。深度0.5 m,相邻两根间距0.5 m,根与坑壑的边界为0.5 m。
实验二:不同深度影响因素实验。在坑壑0.2、0.4、0.6 m深度处分别放置一根葡萄藤。根径都是0.01 m,相对介电常数分别为20.01、19.87、 18.64。相邻两根间距0.5 m,根与坑壑的边界为0.5 m。
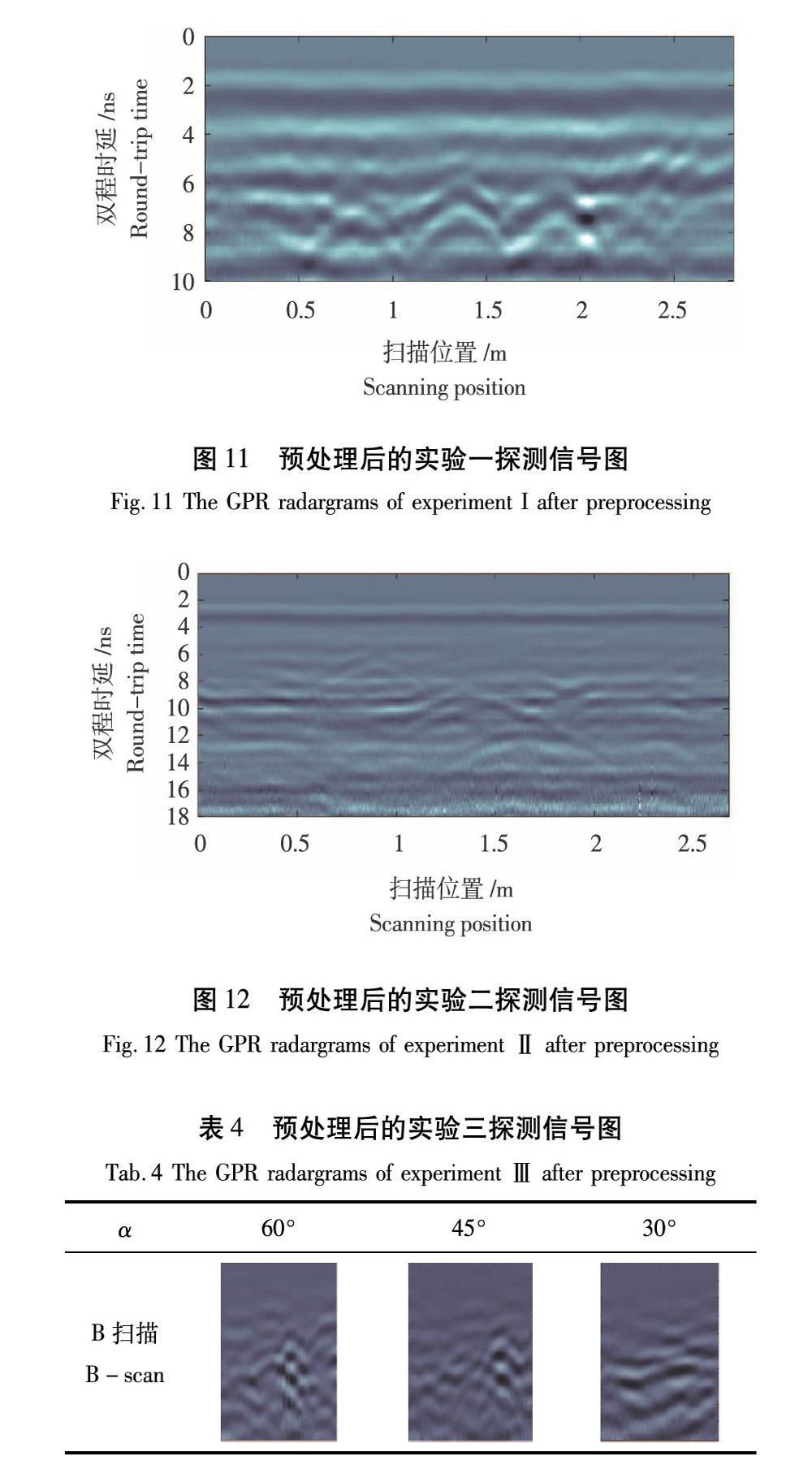
实验三:不同扫描角度影响因素实验。探地雷达分别以30°、45°、60°角度扫描粗根,根深0.5 m,根径0.01 m,相对介电常数为20.01。原始雷达探测信号图经过预处理后,实验一、二、三结果如图11、图12以及见表4所示。
2.3 分析
尽管由于地下土壤情况复杂,实测信号图中背景杂波较多[25],但现场实验结果仍可以证实Gpr Max软件模拟探地雷达检测粗根的有效性和可行性,分析结果如下。
(1)由图6和图11都能直观地显示根径最大的根反射强度也最大,且随着根径的减小,根剖面双曲线变得越来越模糊,根径为5 mm左右时,根的反射双曲线难以分辨。
(2)在图8和图12中,随着埋藏深度的增加,粗根剖面双曲线越来越模糊,反射强度也逐渐减小。但在现场实验信号图中无法识别最佳检测深度。
(3)在表2和表4中,随着探地雷达扫描角度的减小,粗根剖面双曲线的顶部趋于平缓。在现场实验数据图中,随着雷达扫描角度的减小,粗根的反射强度逐渐减弱,剖面双曲线也越来越模糊。当扫描角度小于45°时,现场实验数据图中无法分辨粗根反射双曲线。
3 结论
探地雷达在检测粗根的过程中,会有许多影响因素制约识别的准确性。通过正演模拟实验和现场检测实验的对比,证实了Gpr Max正演软件模拟探地雷达检测粗根的有效性和可行性。评估了在理想的沙质土壤条件下,根系直径、根系埋藏深度和根的水平倾角对根系检测的影响。从而得到以下结论:
(1)探地雷达在检测地下根系中,根径越大,越容易被检测到,在深度合理的情况下,雷达识别的极限是根径为5 mm,即粗根。
(2)探地雷达容易检测到较浅的粗根,埋藏深度越大,越难被检测到。
(3)探地雷达的扫描角度也会影响识别的准确性。在粗根埋藏深度较浅的情况下,扫描角度必须大于45°才能准确识别到粗根。
除以上影响因素,还有许多制约因素影响探地雷达对粗根的检测。诸如:雷达频率、根和土壤的含水量[26]、根的垂直和水平间距、根的垂直倾角。在接下来的研究中将继续对其他影响因素进行实验,研究结果将有助于探地雷达野外根系探测图谱的解译。
【参 考 文 献】
[1]崔喜红,陈晋,关琳琳.探地雷达技术在植物根系检测研究中的应用[J].地球科学进展,2009,24(6):606-611.
CUI X H, CHEN J, GUAN L L. The application of ground penetrating radar to plant root system detection[J]. Advance in Earth Sciences, 2009, 24 (6): 606-611.
[2]GUO L, CHEN J, CUI X, et al. Application of ground penetrating radar for coarse root detection and quantification: a review[J]. Plant and Soil, 2013, 362(1):1-23.
[3]REUBENS B, POESEN J, DANJON F, et al. The role of fine and coarse roots in shallow slope stability and soil erosion control with a focus on root system architecture: a review[J]. Tree Struct Function, 2007, 21(4):385-402.
[4]THOMAS C L, GRAHAM N, HAYDEN R, et al. High-throughput phenotyping (HTP) identifies seedling root traits linked to variation in seed yield and nutrient capture in field-grown oilseed rape (Brassicanapus L.)[J] Annals of Botany, 2016, 118:655-665.
[5]YORK L M, LYNCH J P. Intensive field phenotyping of maize (Zea mays L.) root crowns identifies phenes and phene integration associated with plant growth and nitrogen acquisition[J]. Journal of Experimental Botany, 2015, 66(18):5493-5505.
[6]BUTNOR J R, DOOLITTLE J A, KRESS L, et al. Use of ground-penetrating radar to study tree roots in the southeastern United States[J]. Tree Physiology, 2001, 21(17):1269-1278.
[7]LIU Q, CUI X, LIU X, et al. Detection of root orientation using ground-penetrating radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(1):93-104.
[8]MOLON M, BOYCE J I, ARAIN M A. Quantitative, nondestructive estimates of coarse root biomass in a temperate pine forest using 3-D ground-penetrating radar (GPR)[J]. Journal of Geophysical Research: Biogeosciences, 2017, 122(1):80-102.
[9]BUTNOR J R, SAMUELSON L J, STOKES T A, et al. Surface-based GPR underestimates below-stump root biomass [J]. Plant Soil, 2016, 402:47-62.
[10]ALANI A M, CIAMPOLI L B, LANTINI L, et al. Mapping the root system of matured trees using ground penetrating radar[C]// 2018 17th International Conference on Ground Penetrating Radar, IEEE, 2018: 1-6.
[11]TOSTI F, CIAMPOLI L B, BRANCADORO M G, et al. GPR applications in mapping the subsurface root system of street trees with road safety-critical implications[J]. Advances in Transportation Studies, 2018, 44:107-118.
[12]FREELAND R S. Surveying the near-surface fibrous citrus root system of the orange tree with 3-D GPR[J]. Applied Engineering in Agriculture, 2016, 32(2):145-153.
[13]WU Y, GUO L, CUI X, et al. Ground-penetrating radar-based automatic reconstruction of three-dimensional coarse root system architecture[J]. Plant and Soil, 2014, 383(1-2):155-172.
[14]ZHU S, HUANG C, SU Y, et al. 3D Ground penetrating radar to detect tree roots and estimate root biomass in the field[J]. Remote Sensing, 2014, 6(6):5754-5773.
[15]BARTON C V M, MONTAGU K D. Detection of tree roots and determination of root diameters by ground penetrating radar under optimal conditions[J]. Tree Physiology, 2004, 24(12):1323-1331.
[16]CONYERS L B, GOODMAN D. Ground-penetrating radar: an introduction for archaeologists[J]. Geoarchaeology, 1998, 13(5):232-184.
[17]HIRANO Y, DANNOURA M, AONO K, et al. Limiting factors in the detection of tree roots using ground-penetrating radar[J]. Plant and Soil, 2009, 319(1-2):15-24.
[18]BUTNOR J R, BARTON C, DAY F P, et al. Using ground-penetrating radar to detect tree roots and estimate biomass [J]. Management Science, 2012, 12: 213-245.
[19]DANNOURA M, HIRANO Y, IGARASHI T, et al. Detection of cryptomeria japonica roots with ground penetrating radar[J]. Plant Biosystems, 2008, 142(2): 375-380.
[20]WU Y, GUO L, LI W, et al. Comment on: "root orientation can affect detection accuracy of ground-penetrating radar"[J]. Plant and Soil, 2014, 380(1-2):441-444.
[21]TANIKAWA T, HIRANO Y, DANNOURA M, et al. Root orientation can affect detection accuracy of ground-penetrating radar [J]. Plant and Soil, 2013, 373(1):317-327.
[22]白雪,纪奕才,方广有.探地雷达用于树木单根成像的模拟技术研究[J].中国农业科技导报,2011,13(1):135-142.
BAI X, JI Y C, FANG G Y. Studies on simulation technique of tree single root imaging by ground penetrating radar [J]. Journal of Agricultural Science and Technology, 2011, 13(1):135-142.
[23]文剑,李伟林,肖中亮,等.活立木内部缺陷雷達波检测研究[J].农业机械学报,2017,61(10):180-188.
WEN J, LI W L, XIAO Z L, et al. Radar wave detection of standing trees internal defect[J]. Transactions of the Chinese Society of Agricultural Machinery, 2017, 61(10):180-188.
[24]肖夏阳,文剑,高林,等.探地雷达识别树木内部缺陷层位技术的研究[J].林业机械与木工设备,2017,45(4):14-18.
XIAO X Y, WEN J, GAO L, et al. Research on internal defect layer identification of trees using ground-penetrating radar[J]. Forestry Machinery & Woodworking Equipment, 2017, 45(4):14-18.
[25]郭立,崔喜红,陈晋.基于Gpr Max正演模拟的探地雷达根系探测敏感因素分析[J]. 地球物理学进展,2012, 27(4):1754-1763.
GUO L, CUI X H, CHEN J. Sensitive factors analysis in using GPR for detecting plant roots based on forward modeling [J]. Progress in Geophysics, 2012, 27(4):1754-1763.
[26] LIU X, CHEN J, CUI X, et al. Measurement of soil water content using ground-penetrating radar: a review of current methods [J]. International Journal of Digital Earth, 2017:1-24.
