电液伺服式悬架试验台的模拟仿真研究
2020-05-28赵强秦玉彬孙政王娜
赵强 秦玉彬 孙政 王娜
摘 要:针对国内汽车悬架研发的需求,测试悬架在各种复杂多变负载下的响应性能是非常重要的一个环节。本文重点分析电液伺服式悬架模拟试验台中电液位置伺服系统的组成及原理,建立伺服系统的模型,并基于MATLAB/Simulink软件,建立1/4非独立悬架模型及伺服系统的仿真模型,根据结构不变性原理和最优控制理论分别设计前馈干扰补偿器和系统最优反馈控制器,并将两种控制器应用于伺服系统,构成基于前馈补偿与最优反馈的复合控制,并将B级和D级路面路谱作为电液伺服系统的输入进行仿真,在给定不同负载力的情况下提高系统的响应速度和跟随精度。仿真结果与PID控制作对比表明,采用该复合控制策略能在保证系统稳定性的前提下,有效提高系统的响应速度和跟随精度,从而使试验台能够精确复现路面激励,提高试验台测试精度。
关键词:悬架模拟试验台;电液伺服系统;前馈补偿器;最优反馈控制器
Abstract:According to the demand of domestic automobile suspension research and development, test the response performance of suspension under various complex and changeable loads, this paper focuses on the analysis of the composition and principle of the electro-hydraulic position servo system in the electro-hydraulic servo suspension simulation test bench, establishes the servo system model, and based on MATLAB/Simulink software, establishes the 1/4 non independent suspension model and the servo system simulation model, according to the structure based on the invariance principle and the optimal control theory, the feedforward disturbance compensator and the optimal feedback controller of the system are designed respectively, and the two controllers are applied to the servo system to form the composite control based on feedforward compensation and optimal feedback, and the B-level and D-level road spectrum are simulated as the system input. The response speed and tracking accuracy of the system are improved with different load forces. Compared with PID control, the simulation results show that the composite control strategy can effectively improve the response speed and follow-up accuracy of the system on the premise of ensuring the stability of the system, so that the test-bed can accurately reproduce the road excitation and improve the test precision of the test bench.
Keywords:Suspension simulation bench; electro-hydraulic servo system; feedforward compensation; optimal feedback controller
0 引言
悬架试验台对悬架弹性元件参数的选取有着重要的意義。试验台可以模拟各种路面不平度的路面激励,并通过设计的计算机控制器输出产生路面激振信号,最终经过电液伺服系统液压缸输出的位移来产生路面激励的相应动作,引起悬架振动,因此电液伺服悬架试验台被广泛应用于路谱复现[1]。近年来,随着汽车行业的发展,对汽车性能要求的提高,促使电液伺服悬架试验台先进控制技术的研究取得了很多成果。刘璐等[2]对电液伺服试验台进行了前馈补偿器与PID控制器的复合控制研究,但是PID在外负载过大时,跟随性较差;王存堂等[3]采用三状态控制策略来提高电液伺服系统的响应和跟踪精度,但是未考虑悬架动载荷,对后期仿真的精度有一定的影响。刘刚等[4]采用模糊自整定PID控制方法对电液伺服悬架试验台控制系统进行研究,提高系统的跟随精度,减少响应时间以及提高鲁棒性,但是缺少前馈环节,对仿真结果产生影响。Dong等[5]采用自适应时域控制方法对电液伺服进行控制,提高了控制精度,但是未考虑外界负载力的变化对系统的干扰。电液伺服系统本身是一个非常复杂的非线性系统,且系统多为不确定的参数,此外,悬架试验台电液伺服系统的负载来自悬架的动载荷且变化范围大,特性多样化,1/4悬架的特性和电液伺服系统通过负载耦合到一起,影响了电液伺服系统路谱复现的精度,如何克服悬架特性的干扰,提高对路面位移信号的跟踪性能以及对各种路谱信号都能迅速响应的快速性,是电液伺服系统研究的难点,因此本文采用前馈补偿与最优反馈相结合的复合控制策略。首先根据电液伺服式悬架模拟试验台的组成和原理,建立1/4悬架模型,仿真得到悬架动载荷曲线,即得到电液伺服系统的负载,然后建立电液伺服系统的模型,设计前馈干扰补偿器与最优反馈控制器相结合的复合控制器,并进行仿真,最后与PID控制算法进行对比,验证所设计的复合控制器的有效性。
1 悬架试验台模型及数学模型的建立
1.1 电液伺服式悬架模拟试验台
本文研究的电液伺服式悬架试验台主要是由悬架系统与电液系统构成。系统中位移传感器的作用是采集液压缸的位置信息并反馈给控制器,构成位置反馈闭环系统。其主要原理是在被动悬架模型的基础上用电液伺服缸的位移大小模拟路面位移激励,将伺服缸活塞杆位移的大小作为悬架系统的输入,实现对悬架的测试功能。其主要结构如图1所示。
1.2 悬架及路面激励建模
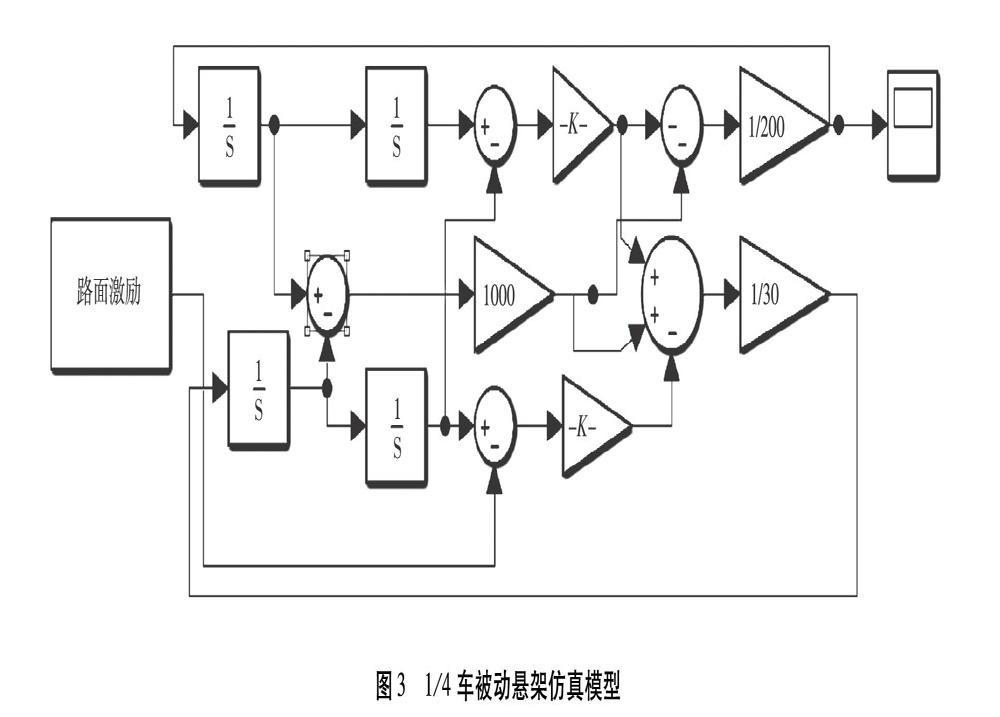
电液伺服系统作为悬架试验台最主要的组成部分,在研究电液伺服系统的过程中,需要将悬架动载荷作为电液伺服系统的外负载干扰输入。汽车悬架系统是非常复杂的非线性系统,为了简化控制模型,突出研究问题的主要方面,本文选取车身-车轮二自由度的1/4车辆被动悬架模型[6],其简化模型如图2所示。
根据公式(1)运动微分方程搭建SIMULINK仿真模型如图3所示。
采用白噪声-积分器的方法模拟路面的不平度,根据公式(2)[8]在SIMULINK中建立路面时域信号生成器模型,如图4所示。改变Gq(n0)的值,可以得到不同路面等级的时域信号。选取路面等级为B、D的时域信号作为路面激励进行仿真[8-13],悬架动载荷仿真结果如图5所示。
由图5仿真曲线可知,在随机路面激励下,被动悬架的动载荷集中在0~5 000 N范围内,为接下来电液伺服系统外负载力FL仿真取值提供参考。
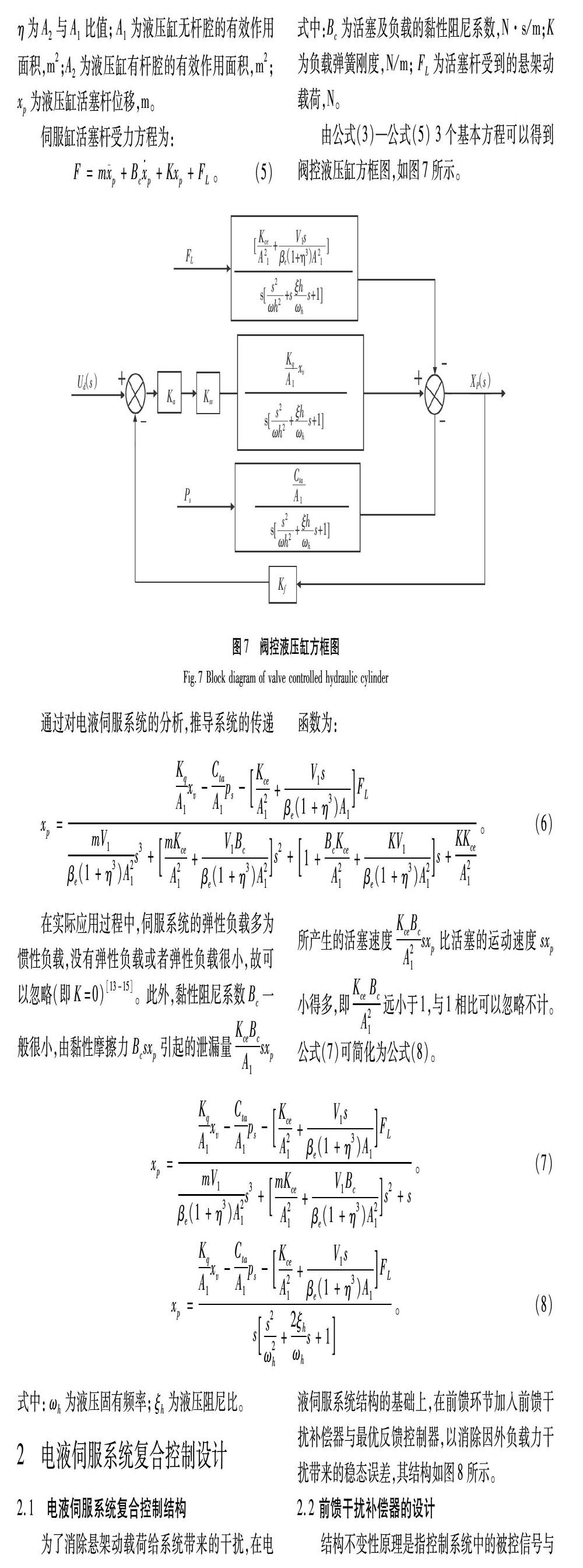
1.3 电液伺服系统数学模型
本文选用的液压伺服系统主要由液压缸、伺服缸、伺服放大器和控制器组成。其中,阀控非对称缸机构如图6所示,其工作原理是控制器控制伺服阀阀芯位移的大小和方向,进而控制流入液压缸的液压油的流量及方向,达到控制输出位移,提高路谱复现的跟随性,实现良好的路谱复现。
2 电液伺服系统复合控制设计
2.1 电液伺服系统复合控制结构
为了消除悬架动载荷给系统带来的干扰,在电液伺服系统结构的基础上,在前馈环节加入前馈干扰补偿器与最优反馈控制器,以消除因外负载力干扰带来的稳态误差,其结构如图8所示。
2.2 前馈干扰补偿器的设计
结构不变性原理是指控制系统中的被控信号与干扰信号绝对无关或者在一定准确度下无关,即被控信号完全独立或基本独立。基于结构不变性原理的前馈干扰补偿控制是一种按照干扰进行补偿的开环控制,从而增强系统对干扰变化的鲁棒性[16-20]。
本文对外负载力FL设计一个前馈干扰补偿环节G1(s),如图9所示。
2.3 电液伺服系统状态空间数学模型的建立及最优控制器设计
本文主要通过解黎卡提方程求解该三阶系统的最优控制问题,基于状态空间表达式设计最优反馈控制器。选取活塞杆位移、速度及负载压力为状态变量,即x=x1,x2,x3T=xp,x·p,PLT。
3 仿真分析
3.1 仿真模型建立
PID控制器在工业控制应用中常见的控制器,因此本文选用PID控制算法作为对比算法,验证前馈补偿器与最优反馈复合控制的有效性。在SIMULINK中建立系统仿真模型,为更直观地察仿真输出,将PID控制和前馈补偿器与最优反馈控制的复合控制输出放在一起进行对比分析,仿真模型如图10所示。
电液伺服系统的仿真参数见表1。其中参数的选取与计算参考文献[14]中电液伺服设计章节。
3.2 仿真结果分析
由图5可知,动载荷即电液伺服系统的外负载FL的取值范围为0~5 000 N,因此取5 000、2 500、1 000 N 3个大、中、小值进行仿真验证。通过仿真计算,验证最优反馈控制加前馈补偿器的复合控制的有效性。
(1)设路面输入为振幅0.02 m,频率为5 rad/s的正弦激励,电液伺服系统的性能指标对比如图11所示。
由图11的仿真结果可知,当系统输入为正弦波时,在低负载时,复合控制器与PID控制的稳态误差分别控制在1.5%与4%,符合预期,但是随着负载力的逐渐增大,PID控制器的稳态误差有逐渐增大的趋势,在负载力为5 000 N的时候,传统PID稳态误差达6%并出现一定的滞后,相比于PID控制,本文设计的最优控制与前馈补偿器的复合控制器在跟随性与稳态误差方面要优于PID控制。
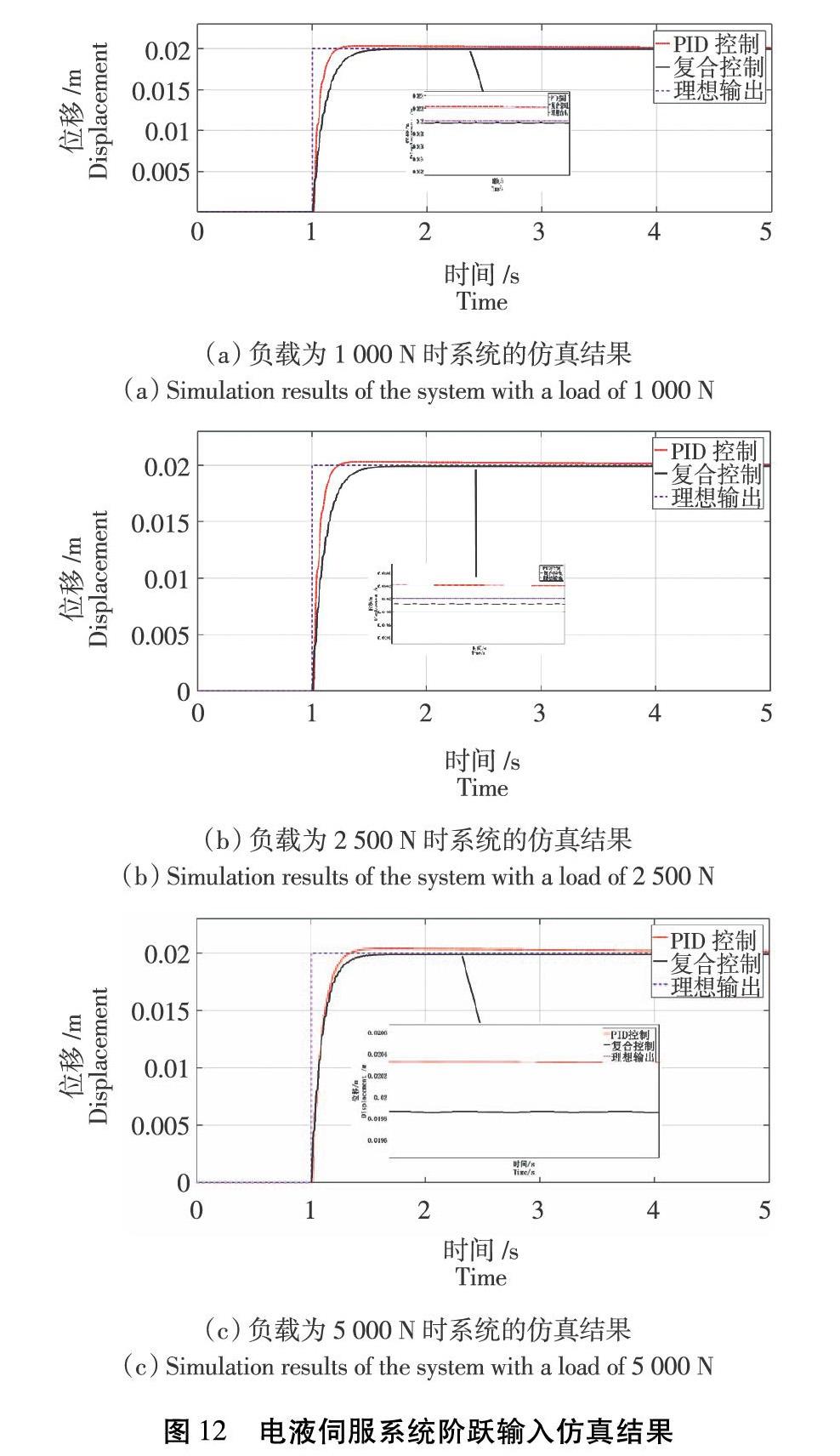
(2)当系统输入为0.02 m的位移阶跃信号指令时,仿真结果如图12所示。当负载为1 000 N时,PID控制的超调量为1.5%,而最优前馈复合控制的超调量为0.3%。后者整体性能要优于前者。随着负载力的逐渐增大,PID的超调量有所减小,基本保持在1.5%,位移上升时间基本保持不变。
4 结论
为提高电液伺服式悬架模拟试验台的工作精度,更真实地进行路谱复现,本文在重构B、D级路面时域模型的基础上,搭建1/4车辆被动悬架模型来获得悬架动载荷。重点分析试验台重要组成部分电液伺服系统的组成结构,建立电液伺服系统的数学模型,根据系统特性及试验台存在的不足,提出基于前馈补偿与最优反馈的复合控制策略。通过仿真可知,当以不同悬架动载荷为电液伺服系统负载干扰力时,与PID控制相比,本文设计的复合控制器在抑制系统稳态误差方面有了较大的提升,具有良好的鲁棒性,總体性能优于PID控制,达到设计要求。
【参 考 文 献】
[1]邹喜红,罗洋,袁冬梅,等.道路模拟试验台电液伺服系统仿真研究[J].机床与液压,2019,47(2):69-73.
ZOU X H, LUO Y, YUAN D M, et al. Simulation and study of electro-hydraulic servo system for the road simulation test rig[J]. Machine Tool & Hydraulics, 2019, 47(2):69-73.
[2]刘璐,郭彦青,张保成.基于前馈补偿的电液伺服加载试验台复合控制[J].液压与气动,2014,38(4):66-69.
LIU L, GUO Y Q, ZHANG B C. The compound control of electro-hydraulic servo load test board based on reed-forward compensation[J]. Hydraulic and Pneumatic, 2014, 38(4):66-69.
[3]王存堂,张凯,张兵,等.电液伺服式减震器测试平台控制策略[J].振动、测试与诊断,2016,36(6):1142-1146.
WANG C T, ZHANG K, ZHANG B, et al. Control strategy of testing platform for electro-hydraulic servo damper[J]. Journal of Vibration, Measurement & Diagnosis, 2016, 36(6):1142-1146.
[4]刘刚,高家兵,聂高法,等.基于模糊PID的悬架试验台激振控制系统仿真[J].农业装备与车辆工程,2015,53(2):51-56.
LIU G, GAO J B, NIE G F, et al. Simulation of suspension testbed based on fuzzy-PID control[J]. Agricultural Equipment &Vehicle Engineering, 2015, 53(2):51-56.
[5]DONG X M, YU M, LIAO C R, et al. Comparative research on semi-active control strategies formagneto-rheological[J]. Nonlinear Dynamics, 2010, 59(3):433-453.
[6]SAURABH Y S, KUMAR S, JAIN K K, et al. Design of suspension system for formula student race car[J]. Procedia Engineering, 2016, 144:1138-1149.
[7]靳晓雄,张立军,江浩.汽车振动分析[M].上海:同济大学出版社,2002.
JIN X X, ZHANG L J, JIANG H. Vehicle vibration analysis[M]. Shanghai: Tongji University Press, 2002.
[8]曲啸天,赵强,赵吉业,等.基于实测不平度的路面等级分析与评价[J].中外公路,2019,39(1):40-45.
QU X T, ZHAO Q, ZHAO J Y, et al. Analysis and evaluation of pavement grade based on measured unevenness[J]. Chinese and Foreign Highway, 2019, 39(1):40-45.
[9]鄒祥莉, 徐建闽, 于洁涵, 等. 基于分层递阶结构和S模型预测控制的快速路多匝道协同控制模型研究[J]. 公路工程, 2019, 44(5): 105-109, 161.
ZOU X L, XU J M, YU J H, et al. Research on expressway multi-ramp collaborative control model based on hierarchical structure and S-model predictive control[J]. Highway Engineering, 2019, 44(5): 105-109, 161.
[10]赵强,白欣.基于粒子群算法优化的车辆主动悬架PID控制[J].森林工程,2017,33(1):66-69.
ZHAO Q, BAI X. PID control of vehicle active suspension based on particle swarm optimization[J]. Forest Engineering, 2017, 33(1):66-69.
[11]高杨, 巩明德,赵保强,等.电液伺服振动试验台控制策略研究[J].汽车文摘,2019(10):45-50.
GAO Y, GONG M D, ZHAO B Q, et al. Research on control strategies of electro-hydraulic servo vibration table[J]. Automotive Digest, 2019(10): 45-50.
[12]范超雄.车辆电液主动悬架控制研究[D].哈尔滨:东北林业大学,2014.
FAN C X. Research on control of vehicle electro-hydraulic acitve Suspension[D]. Harbin: Northeast Forestry University, 2014.
[13]李洪人.液压控制系统[M].北京:国防工业出版社,1990.
LI H R. Hydraulic control system[M]. Beijing: National Defense Industry Press, 1990.
[14]宋志安.基于MATLAB的液压伺服控制系统分析与设计[M].北京:国防工业出版社,2007.
SONG Z A. Analysis and design of hydraulic servo control system based on MATLAB[M]. Beijing: National Defense Industry Press, 2007.
[15]SAMANTA B. Artificial neural networks and genetic algorithms for gear fault detection[J]. Mechanical Systems & Signal Processing, 2004, 18(5):1237-1282.
[16]郭欣欣,秦琴,郑凤武.基于非对称阀控非对称液压缸的前馈干扰补偿器设计[J].电子世界,2013,11(20):132-134.
GUO X X, QIN Q, ZHENG F W. Design of feedforward disturbance compensator based on asymmetric valve controlled asymmetric hydraulic cylinder[J]. Electronic World, 2013, 11(20):132-134.
[17]KOVEOS Y, TZES A, TSAHALIS D T. Multiparametric optimization of a pulse width/phase modulated controller for a high frequency active electro-hudraulic pump system[C]// 45th IEEE conference on Decision and control, San Diego, USA, 2006:5335-5340.
[18]翟海燕,高英杰,吳国辉.电液控制系统基于LQR的最优控制研究[J].液压与气动,2008,32(10):56-59.
ZHAI H Y, GAO Y J, WU G H. Study on LQR optimal control of electro-hydraulic control system[J]. Hydraulic and Pneumatic, 2008, 32(10):56-59.
[19]蒙磊,丁问司.基于MATLAB的液压伺服系统二次型最优控制器设计[J].机械设计与制造,2010,31(1):9-11.
MENG L, DING W S. Design based on MATLAB for quadratic optimal controllers in the hydraulic servo system[J]. Machinery Design & Manufacture, 2010, 31(1):9-11.
[20]李小泉. 立式液压柱塞沙浆液压系统设计[J]. 林业机械与木工设备, 2018, 46(12): 64-68.
LI X Q. Vertical hydraulic plunger mortar hydraulic system design[J]. Forestry Machinery & Woodworking Equipment, 2018, 46(12): 64-68.
