物流机器人在通道中高速运输安全性分析
2020-05-28刘赛赵阳徐岩松崔平吴越鹏
刘赛 赵阳 徐岩松 崔平 吴越鹏


摘 要:移动机器人在狭窄通道的移动速度直接影响物料运输效率,提出一種基于生存理论的新型分析方法判断机器人在狭窄转弯通道的高速安全性。生存理论可以同时考虑环境和机器人动力学的双重限制,在理论上具有安全分析上的先进性。首先分析直线通道的生存性,然后扩展到转角通道,给出了通道生存核的计算方法,其中多面体运算起到了关键作用。采用生存理论分析系统环境能获得较大的安全控制裕度,为机器人高速移动提供了理论支撑与技术支持。
关键词:移动机器人;生存理论;生存核;物流机器人;机器人避障
DOI:10. 11907/rjdk. 191609
中图分类号:TP311 文献标识码:A 文章编号:1672-7800(2020)003-0001-05
Safety Analysis of High Speed Transportation of Logistics Robot Narrow Channel
LIU Sai1, ZHAO Yang2, XU Yan-song2, CUI Ping2, WU Yue-peng1
(1. School of Optical-Electrical information and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China; 2. Oil Production Equipment Branch Daqing Oilfield Equipment Manufacturing Group, Daqing 163255, China)
Abstract: The speed of movement of mobile robots in narrow passages is critical to the efficiency of material transport. This paper proposes a new method based on survival theory to judge the high-speed safety of the robot in the narrow turning channel. Survival theory can consider both the limits of environment and robot dynamics. This paper first analyzes the survivability of linear channels, and then expands to the corner channel. The polyhedral operation plays a key role in the calculation by giving the general road survival kernel calculation method. A large safety control margin can be obtained by using the survival, which provides theoretical support and technical support for the high-speed movement of the robot.
Key Words: mobile robot; survival theory; survival core; logistics robot; robot obstacle avoidance
0 引言
高速运输对于产业物流机器人至关重要。例如,在工厂、仓库、医院等场合,机器人的移动空间有限,通常处于狭窄通道中工作。传统的机器人控制需要减速确保转弯安全,但这会降低运输效率。转弯减速的主要原因在于传统方法没有将环境复杂性与机器人的动力学约束完美融合,从而影响了转向避让效率。现有机器人避障方法很多,其中不考虑机器人模型的控制称为非模型方法,包括人工势场法[1]、矢量场直方图(VFH)[2]、模糊控制[3]等。这些方法比较保守,不能保证机器人的动力学符合环境特征。
为使机器人以更高速度避障,必须考虑基于机器人的动态模型进行轨迹预测[4]。现有轨迹预测方法通常是基于随机模型或确定性模型。随机模型包括隐马尔可夫模型[5]、神经网络[6]、贝叶斯网络[7]、支持向量机[8]、高斯混合模型[9]等。这些模型可由机器人运行数据训练得来,如速度、加速度、方向角等,可灵活用于机器人控制。但是如果训练数据难以覆盖必要的状态空间,特别是机器人的危险状态,这些方法可能引起严重事故。
还有一种轨迹预测方法是使用确定性模型,但是当控制输入范围较大时,预测轨迹也具有多种可能性,因此会导致计算避障策略浪费巨大的计算资源。典型方法如动态窗口方法(DWA)[10]、控制Lyapunov函数法[11]、路径规划[12]等,这些方法通常采用效率较低的搜索优化方法。因此,需要新的控制方法使机器人适应复杂环境。模型预测控制(MPC)可以同时考虑环境约束,机器人控制限制和机器人动力约束,进而提供优化的控制信号,因此引起了当今研究者的广泛关注[13]。移动机器人在障碍环境中移动的MPC结构可以通过以下约束有限时间最优控制(CFTOC)问题[14]表示。
其中,下标[k|t]表示算法从[t]时刻开启并向后预测的[k]时刻,[k+1|t]表示[k]时刻的后续预测时刻,[xk|t]和[uk|t]分别表示预测[k]时刻处的状态及控制,模型的动态不确定性由扰动向量[dk|t]表示。E(.)表示随机变量的期望。求解问题(1)可获得一组控制序列[uk|t],在满足约束条件的情况下,使代价函数cost(.)期望最小,方程(1b)定义了机器人动力学模型,(1c)表示机器人控制[u]的限制条件,(1d)表示环境约束,(1e)为初始状态。
虽然MPC能较完美地解决机器人的动态适应问题,并在一定程度上充分考虑预测时间段内所有可行路径,再依据代价函数选出最优路径实施跟踪。但是MPC在控制闭环稳定性与控制求解可行性方法上还存在较大缺陷,可见机器人避障领域亟需新理论解决机器人安全移动问题。研究发现,生存理论有望在该领域实现突破。生存理论是Aubin等[15]首先提出并用于分析动态系统演化与环境适应性的理论,为稳定性分析、安全性设计等领域提供了新方法。
1 生存理论概述
考虑一般控制系统[16]:
其中,[x∈Rn]为系统状态;为系统控制;[fx,u]为[Rm+n]到[Rn]上的Lipschitzian函数。将上述系统模型用集值映射表示便于生存理论推导,系统(2)则可表示为:
定义1[17] 考虑集合,对于任意初始状态[x0∈Rn],使得[x(t)∈K],,其中[xt]是系统(2)的解,则称系统(2)在集合K中是可生存的。
定义2 [17] 令,则集合[K]在[x]处的切锥定义为:
其中,[dKy]为点[y∈Rn]到集合[K]的距离。
定理1 [17] 对于系统(2),闭集是可生存的充要条件为:对任意[x∈K],都有:
定义3 [18] 如果,且,则称[J]为系统在[K]中的一个生存域。
环境集合[K]最大的生存域被称为生存核,用[ViabK]表示。
定义4 [18] 系统相对集合[K]的生存核为:
2 物流机器人构成及其动力学模型
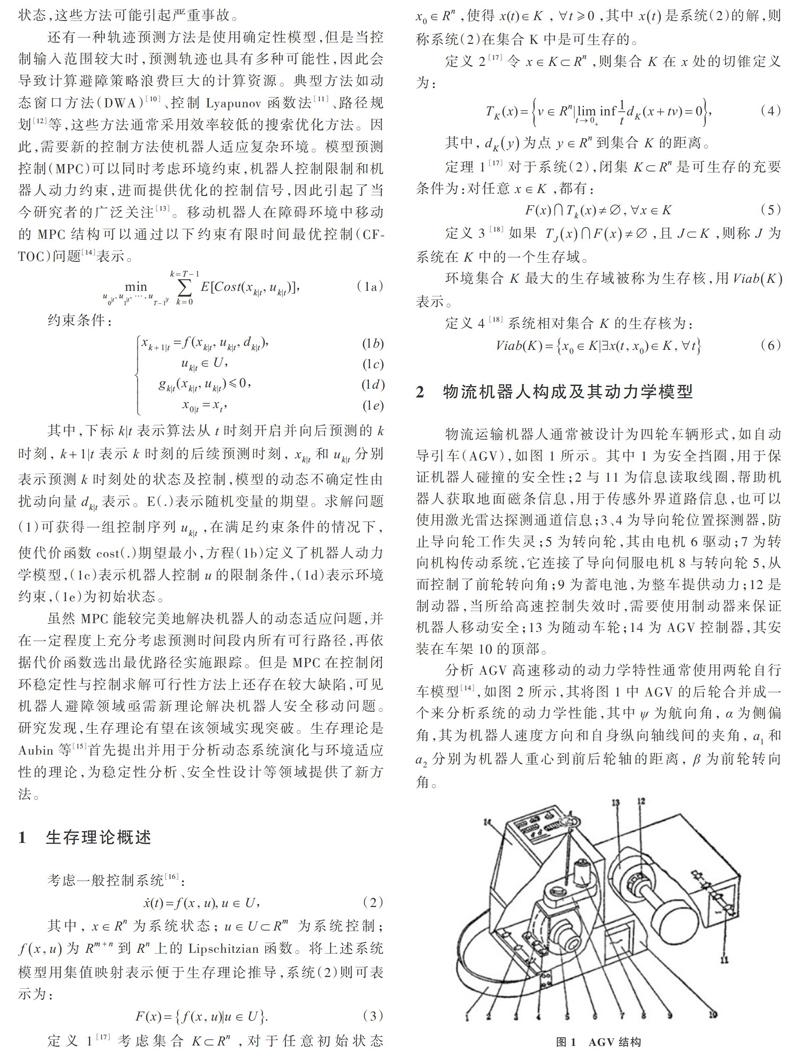
物流运输机器人通常被设计为四轮车辆形式,如自动导引车(AGV),如图1所示。其中1为安全挡圈,用于保证机器人碰撞的安全性;2与11为信息读取线圈,帮助机器人获取地面磁条信息,用于传感外界道路信息,也可以使用激光雷达探测通道信息;3、4为导向轮位置探测器,防止导向轮工作失灵;5为转向轮,其由电机6驱动;7为转向机构传动系统,它连接了导向伺服电机8与转向轮5,从而控制了前轮转向角;9为蓄电池,为整车提供动力;12是制动器,当所给高速控制失效时,需要使用制动器来保证机器人移动安全;13为随动车轮;14为AGV控制器,其安装在车架10的顶部。
分析AGV高速移动的动力学特性通常使用两轮自行车模型[14],如图2所示,其将图1中AGV的后轮合并成一个来分析系统的动力学性能,其中[ψ]为航向角,[α]为侧偏角,其为机器人速度方向和自身纵向轴线间的夹角,[a1]和[a2]分别为机器人重心到前后轮轴的距离,[β]为前轮转向角。
机器人的动力学模型可由状态空间模型[x=Ax+Bu]表示[19]。
其中,[A]為状态转移矩阵,[B]为输入矩阵,[Y]为机器人横向位置(垂直通道方向的位置),[X]为机器人纵向位置(平行通道方向),[M]为机器人质量;[V]为机器人速度;[D1]和[D2]分别为前后轮侧偏刚度;[Izz]为机器人绕重心的横摆转动惯量;[δ1]和[δ2]分别为前后轮的侧角。
为提高运输效率,可以限定机器人的速度保持高速恒定,则模型(7)转换为线性时不变系统,此时机器人将全部依赖转向控制。分析表明:在遇到障碍物时转向策略比制动策略更加有效[20],可见速度恒定设置有利于高速躲避障碍,但需进一步分析狭窄通道的安全移动空间。
3 机器人相关约束
由于仅考虑转向,系统的输入约束为转向角限制。
其中,[βmax]和分别为最大正负偏角。系统的状态约束可以保证机器人的安全移动,首先应该限制机器人的坐标(X,Y)一直保持在工作环境中,可将模型(7)考虑在通道坐标系下,其中[x]轴方向一直朝向通道出口方向,为保证机器人不与墙壁发生碰撞,需要对机器人的[y]轴位置进行约束。
其中,[Ymax]、[Ymin]分别代通道墙壁在通道坐标系下的纵向位置。
可以将连续转弯通道考虑成多个不同朝向的直线通道,分段考虑机器人在直线通道内的移动安全,在某一直线通道内,其[X]坐标的约束设计如下:
其中,[Xcorner1]、[Xcorner2]分别是直线通道两头端点的[X]坐标。在分段直线通道内,要求机器人在当前道路坐标系下保持航向角与侧偏角在较小范围内变动,因此为机器人角度状态加上如下约束:
其中,[αmin]、[αmax]是侧偏角范围,[ψmin]、[ψmax]是航向角范围,[ψmin]、[ψmax]是航向角速度范围。
4 安全性分析
将机器人模型、控制限制以及环境约束相融合,根据生存理论迭代计算机器人相对环境的生存核。为方便数值计算,将机器人模型(7)离散成如下一般系统形式:
其中,[x=[XYψψα]T] ,[u=[βγ]T]。离散系统(14)相对一般环境集合[K]的生存核可通过如下Saint Pierre生存核[9]迭代算法计算:
其中,[Kn]为经过[n]次迭代计算后获得的集合,[Kn+1]为[Kn]经过一次迭代后获得的集合,[K0]为初始环境集合。[Kn+1]如果迭代收敛到与[Kn]相同,则[Kn]为原空间[K]的生存核,该迭代算法可更具体由向后一步可达计算以及集合相交操作获得。
其中,[Reach1(·)] 为集合向后一步可达运算,定义为:
其中,通道环境集合[K]由不等式(9)-(13)包围构成,可使用多面体形式表示环境集合,因为不等式组符合多面体的一般定义,其被称作多面体的[H]表示,具体如下:
5 直线通道生存核计算
将环境用多面体表示,针对模型(14)迭代计算生存核,关键在于向后一步可达运算以及集合求交运算。值得注意的是,在保持速度恒定的情况下,模型(7)可具体转化为离散线性时不变系统,可用如下标准形式表示:
其中,[G]为状态转移矩阵,[uk∈U],[xk∈K]。一般线性系统(19)的向后一步可由式(20)计算。
其中,[G-1]为矩阵[H]的逆,操作符[⊕]表示集合闵可夫斯基求和操作。可见机器人生存核计算可进一步分解为线性变换、集合求交以及闵可夫斯基求和运算,由于环境使用多面体表示,因此这些集合运算可具体由多面体运算替代。
考虑采用顶点[v1,v2,?,vk]构成的多面体,即采用多面体的V表示法,其线性变换可以由式(21)计算。
考虑两个采用[H]表示法的多面体则[P1]、[P2]的交集计算方法如下:
考虑两个采用[V]表示法的多面体[P1]、[P2],闵可夫斯基求和计算如下:
其中,[vi]、[uj]分别是[P1]、[P2]的顶点。
机器人模型与约束的具体参数如表1所示,假设机器人速度[V]恒定在8m/s,利用算法(16)迭代计算,由于模型(19)的[X]状态朝向通道出口,为机器人的正常行驶方向,不需要安全性检查,因此只需检查除[X]状态以外的其它模型(19)的状态,看其所组成的多面体集合是否收敛,运行结果如图3所示。
由于所计算的生存核存在于5维空间,方便起见,向状态[x]、[y]、[ψ]坐标投影,并记录每次迭代计算的多面体结果,如图3(a)所示,原始道路空间投影为长方体,经多次迭代,多面体向内卷曲成为上次迭代结果的子集,直到收敛为止获取生存核,最终收敛结果在道路横坐标[y]与航向角[ψ]上的投影如图3(b)所示。观察生存核边界,机器人的航向角与机器人在道路的y坐标具有函数关系:例如当机器人在道路左边界时,即[y]=5,如表1所示,其必须保证机器人的航向角为正。
6 转弯通道生存核计算
以直角转弯通道为例,其可看作两个相互垂直的直线通道连接,如图4所示,出口与入口构成转弯。
拐角道路模型的生存性分析算法描述如下:
入口安全区域计算:
首先计算出口的多面体[Kout]生存核[Viab(Kout)],将其与入口多面体[Kin]取交集得到目标集合[C],然后初始化参数n=0,并且将第0次迭代后的入口多面体[Kin0]初始化目标集合[C],当n小于迭代限制[Nin]执行如下循环:
如果[Kinn]为空集,显示不安全,表示未能找到入口安全区域,此时,跳出循环。如果第n次迭代入口多面体集合[Kinn]的向前一步可达集与第n-1次迭代入口多面体集合[Kinn-1]在[Yψψα]空间的投影相等,表示成功找到入口安全区域,跳出循环。否则进行如下迭代计算:
将[Kinn]的向后一步可达集[Reach1(Kinn)]与[Kin]取交集得到[Kinn+1],即Reach1(Kinn)],接着将n自增1,继续迭代,直到满足上述条件,跳出循环。
出口安全区域计算:
初始化参数i=0,第0次迭代出口多面体集合初始化目标集合[C],如果i小于迭代限制[Nout],执行如下循环:
将集合[Kout]的生存核与[Kouti]的向前一步可达集[Forward1(Kouti)]取交集得到[Kouti+1],即[Kouti+1=Viab(Kout)?][Forward1(Kouti)],i自增1,直到不满足循环条件,跳出循环。
弯道安全区域计算:
将上述迭代过程中每次迭代后的出口入口多面体集合取交集得到弯道的安全区域即生存核,即[Safe(Kin,]。
其中,表示在线性系统(19)下集合[K]的向前一步可達集,计算方法如下:
(a) 生存核在[x]、[y]方向投影
继续采用表1的机器人参数与约束条件,机器人速度保持恒定在8m/s(约30km/h)。经上述算法描述计算,获得转弯道路的可生存安全区域,迭代结果为图5(a)道路空间内的深色多面体集,图中显示当机器人处于A点时,必须以最大幅度向右转以确保机器人可以安全通过拐角尖点。当机器人处于右边界B点,必须最大幅度左转,否则恒速机器人必将碰撞底部边界。可见当机器人保持恒定高速度通过转弯通道时,其安全空间投影相对原始空间在转弯处有很大收缩,需要控制机器人始终保持在所分析的生存核投影内方能保证机器人的高速移动。
7 结语
本文提出了一种基于生存理论分析移动机器人在通道内高速移动安全性的新方法,引入了多面体及其操作计算通道环境的生存空间,能够发现曲折空间的最大安全子集,从而更好地指引机器人作避障控制。由于可分析高维空间的安全性能,因此该方法的安全分析具有理论上的先进性。现实环境中,非90°拐角很常见,确保改进算法能够计算出任意角度拐角的生存核则是下一步研究方向,同时进一步获取生存核的中心线(具有最大的安全裕度)对机器人进行跟踪控制。
参考文献:
[1]KHATIB O. Real-time obstacle avoidance for robot manipulator and mobile robots [J]. Int. J. Rob. Res., 1986(5): 90-98.
[2]ULRICH I,BORENSTEIN J.VFH+: Reliable obstacle avoidance for fast mobile robots[J]. Proceedings of ICRA,1998, 1572-1577.
[3]AMOOZGAR M H, APIPOUR K, SADATI S H. A fuzzy logic-based formation controller for wheeled mobile robots[J]. Ind. Rob., 2012, 38:269-281.
[4]LIU L,GAO Y.Speed optimization control for wheeled robot navigation with obstacle avoidance based on viability theory[J]. Automatika, 2016, 57:428-440.
[5]NECHYBA M C, XU Y.Stochastic similarity for validating human control strategy models[J]. IEEE Trans. Robotics and Automation, 1998(14):437-451.
[6]WAHAB A,QUEK C,TAN C K,et al. Driving profile modeling and recognition based on soft computing approach[J]. IEEE trans. Neural Networks, 2009(20):563-582.
[7]TEZUKA S, SOMA H, TANIFUJI K. A study of driver behavior inference model at time of lane change using Bayesian networks[J]. In: IEEE Int. Conf. Industrial Technology, 2006:2308-2313.
[8]MANDALIA H M, SALVUCCI M D D. Using support vector machines for lane-change detection [J]. In Proc. HFES, 2005:1965-1969.
[9]SAINT-PIERRE P. Approximation of the viability kernel[J]. Applied Mathematics and Optimization,1994, 29(2):187-209.
[10]WIEST J, H?FFKEN M, KRE?EL U, et al. Probabilistic trajectory prediction with gaussian mixture models[J]. IEEE IV Symposium, 2012, 141-146.
[11]VANDANJON P O, COIRET A, LORINO T. Viability theory and road safety[J]. Vehicle Syst. Dyn., 2013, 51:602-623.
[12]REBAI K,AZOUAOUI O,BENMAMI M, et al.Car-like robot navigation at high speed [J]. In Proc. ROBIO,2007:2053-2057.
[13]CARVALHO A, LEFEVRE S, SCHILDBACH G, et al. Automated driving: the role of forecasts and uncertainty-a control perspective[J]. Eur. J. Control, 2015(24):14-32.
[14]LIU L, GAO Y , WANG F Z . Road safety analysis for high-speed vehicle in complex environments based on the viability kernel[J]. IET Intelligent Transport Systems, 2018(12):495-503.
[15]AUBIN J P. Viability theory[M]. Boston: Birkhauser, 1991.
[16]高巖. 仿射非线性控制系统生存性判别[J].控制理论与应用,2009,26(6): 654-656.
[17]GAO Y. Viability criteria for differential inclusion[J]. Journal of Systems Science and Complexity, 2011(24): 825-834.
[18]VANDANJON P O, COIRET A, LORINO T. Viability theory and road safety [J]. Vehicle Syst. Dyn., 2013,51:602-623.
[19]ELLIS J R. Vehicle Handling Dynamics[M]. New Jersey:Wiley- Blackwell,1994.
[20]SOUDBAKHSH D,ESKANDARIAN A.Steering control collision avoidance system and verification through subject study[J]. IET Intelligent Transport Systems,2015, 10(9): 907-915.
(责任编辑:孙 娟)
收稿日期:2019-05-17
基金项目:国家自然科学基金项目(61074087);上海市自然科学基金项目(17ZR1419000)
作者简介:刘赛(1994-),男,上海理工大学光电信息与计算机工程学院硕士研究生,研究方向为智能交通;赵阳(1989-),男,大庆油田装备制造集团采油设备分公司工程师,研究方向为机械制造;徐岩松(1969-),男,大庆油田装备制造集团采油设备分公司技师,研究方向为机械制造;崔平(1973-),男,大庆油田装备制造集团采油设备分公司技师,研究方向为机械制造;吴越鹏(1987-),男,上海理工大学光电信息与计算机工程学院博士研究生,研究方向为机器人优化控制。
