穴盘式蔬菜嫁接用苗高速切割输送装置改进设计
2020-05-26柏宗春夏礼如吕晓兰
柏宗春 夏礼如 吕晓兰

|摘要|针对蔬菜苗嫁接生产过程中人工切割运输环节存在的劳动繁重、效率低的问题,介绍了新型人机协作式嫁接流水线的基本原理,在分析原切割装置存在问题的基础上,提出一种穴盘式蔬菜嫁接用苗高速切割输送装置的改进设计,并对改进后装置的结构设计进行了详细分析。新装置仍采用整排连续切割的方式,以保持较高的切割效率。设计了新型切割结构,采用多个高速旋转的盘式切割装置并行设置,替代往复式切割装置。改进原有拨苗装置的叶片设计,减小蔬菜苗损伤。该切割输送装置的改进设计为穴盘式蔬菜苗高速切割输送提供了一种新的设计参考。
目前蔬菜嫁接技术已经成为一项主流技术广泛应用于全世界的蔬菜生产。随着蔬菜种植面积的不断增大,对于蔬菜嫁接效率和质量的要求越来越高。传统人工嫁接方式存在效率低,劳动强度大等缺点,随着人力成本的不断提高,越来越不适应于大规模蔬菜生产[1-3]。
为了提高蔬菜嫁接效率,自20世纪80年代开始,各农业发达国家开始全自动和半自动蔬菜嫁接设备的研究[4-5],已经取得了一定的成果,如日本、韩国、荷兰等已研制出全自动嫁接设备[6-9],国内自动嫁接机设备的研究也有报道[10-11],但这些设备存在价格高昂、技术不成熟、适应性差等缺点,目前很难在国内大规模推广应用。
针对这一问题,提出一种适应于规模化嫁接生产的人机协作式嫁接流水线。充分发挥人工嫁接和机械切割的优点,提高嫁接效率,降低嫁接成本。嫁接苗高速切割输送装置是该人机协作式嫁接流水线的关键设备。柏宗春等[12]已针对该切割输送装置开展一系列研究工作,但也发现切割装置和拨苗装置的结构还有待改进。该设计在此基础上对该装置进行结构上的改进,并对新结构进行了详细分析。
人机协作式嫁接流水线
规模化的人工嫁接流水线主要操作过程包括蔬菜苗输送、切割、对接、固定等操作。通过调研发现,整个嫁接流程中蔬菜苗的人工输送和切割环节,约占用整个嫁接时间的50%~60%,劳动量大,效率低,切割质量不稳定,严重影响嫁接效率和质量;而在操作要求较高的蔬菜苗的对接和固定环节,熟练工人生产率可达900~1000株/h,已接近某些自动嫁接机的水平,且嫁接工人可以掌握多种嫁接方法,能够适应不同种类蔬菜苗的嫁接操作。
针对国内嫁接生产和设备的现状,提出一种人机协作式嫁接流水線[12]。该流水线基于规模化人工嫁接流水线,保留人工嫁接工位,增加蔬菜苗机械切割及输送装置,将耗时耗力的切割输送环节改用机械化操作,配合人工嫁接操作(图1),可以在人机协作情况下,发挥人工嫁接和机械切割的各自优点。在这种人机协作的嫁接模式下,预计嫁接效率可提高一倍以上,既提高了嫁接效率,降低嫁接成本,又可保证嫁接质量。
存在问题
为了满足所提出的人机协作式嫁接流水线对蔬菜嫁接苗高速切割输送装置的要求,田素博等[12]提出了一种高速切割输送装置,并展开了理论和试验研究。研究结果表明该装置具有较高的切削效率,但其切割装置和拨苗装置还存在问题。
首先,原切割输送装置的切割装置采用往复式切割机构,其切割效果与刀具往复切割的频率有关。当切割频率较低时,刀具刃口的速度较低,往往造成蔬菜苗切口不整齐,质量较差,尤其对于苗茎较软的蔬菜苗,容易形成撕裂状切口,甚至损伤蔬菜苗,严重影响蔬菜苗的切割质量。当切割频率较高时,受限于育苗穴盘的输送及拨苗速度,往往切割后的蔬菜苗还没有拨离切割位置,切割刀具就进行了重复切割,不仅影响切割质量,还极易造成蔬菜苗的损伤。
其次,原拨苗装置采用旋转叶片式拨苗机构,通过高速旋转的拨苗叶片将切断后的蔬菜苗拨至蔬菜苗输送装置。为了减小叶片对蔬菜苗的损伤,在叶片末端与蔬菜苗接触部分设计了柔性毛刷结构,通过柔软的毛刷与蔬菜苗接触,减小拨苗叶片对蔬菜苗的损伤。实际试验过程中发现,叶片末端的毛刷结构可以一定程度减少蔬菜苗的损伤,但同时带来新的问题。部分蔬菜苗会夹到毛刷缝隙内,造成蔬菜苗的缠绕,甚至会增加蔬菜苗的损伤风险。针对以上问题,本文将在原有切割输送装置的基础上,重新对切割输送装置进行结构改进,以提高其性能。
装置结构设计
总体设计
通过调研发现,常见的嫁接用蔬菜苗切割装置的切割过程一般可划分为上苗、夹持、切割、分离等几个部分[13-14],切割方式多采用逐棵切割,因而切割效率较低。为了克服以上缺点,进一步提高切割效率,通过结构创新,柏宗春等[12]提出一种针对穴盘育苗的整盘连续切割的新型蔬菜苗高速切割装置。该装置采用多切割刃并行配置,穴盘秧苗成排切割,省去秧苗夹持过程,使切割过程连续不中断,以提高切割效率。
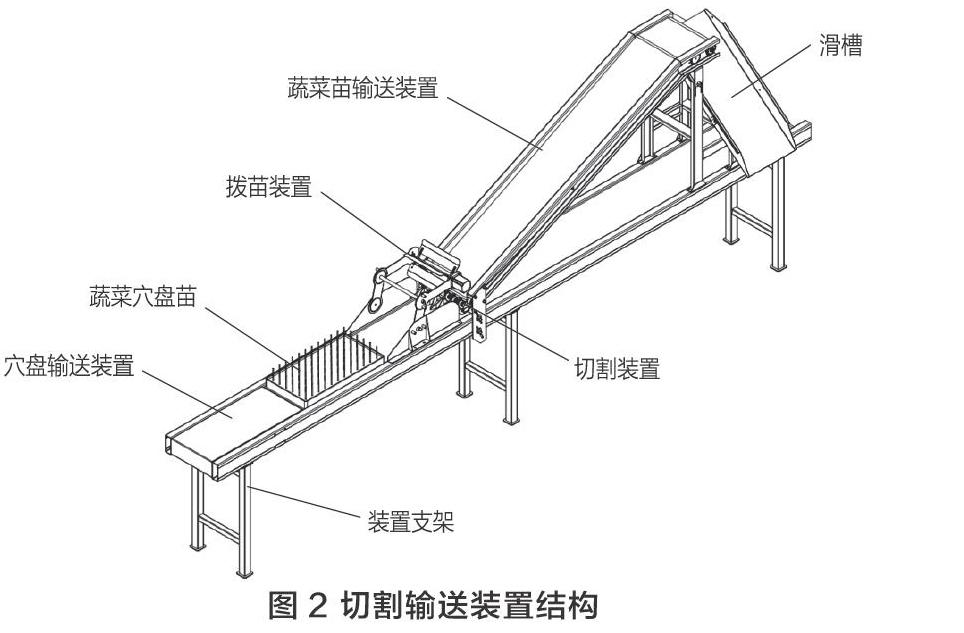
这里保持原有切割输送装置的整体结构方式不变,改进后的穴盘式蔬菜苗高速切割装置的结构(图2),其主要包括:装置支架、穴盘输送装置、切割装置、拨苗装置、蔬菜苗输送装置、滑槽等。基本工作原理为:蔬菜苗穴盘由苗盘输送装置输送至切割装置,切割刀具将一排蔬菜苗切断,此时拨苗轮转动带动拨苗叶片将切断的蔬菜苗拨至蔬菜苗输送装置,而切割后的育苗穴盘则沿着穴盘输送装置继续向前运动,完成蔬菜苗和穴盘的分离。切割装置每次完成一排蔬菜苗的切割,蔬菜苗的切割和输送过程连续不中断,能够极大地提高切割输送效率。
切割装置设计
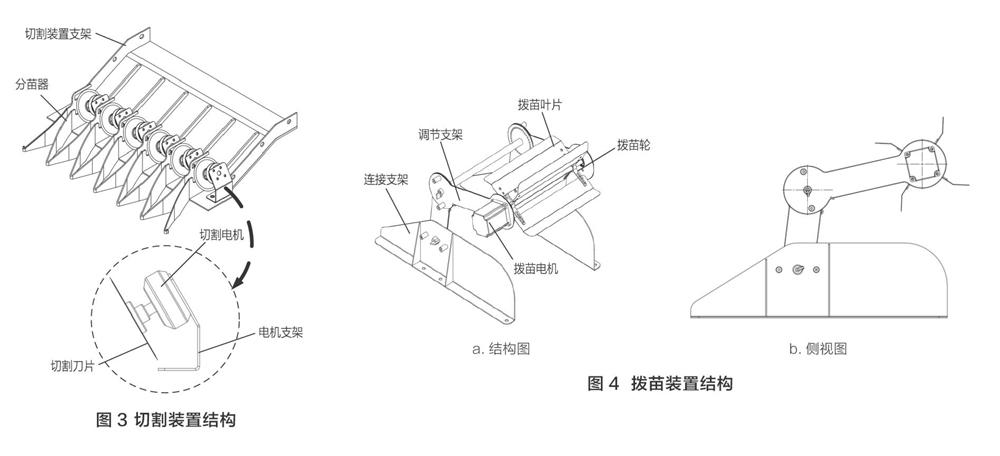
针对原有切割输送装置存在的问题,为完成穴盘蔬菜苗的成排切割,提出新型切割装置结构(图3)。该装置主要包括:分苗器、切割装置支架、电机支架、切割电机、切割刀片等。分苗器设置在切割刀片之前,2个分苗器之间形成的间隙供蔬菜苗通过,切割刀片与电机连接,作高速旋转;切割电机通过电机支架与底板连接。当蔬菜苗穴盘输送至切割装置时,蔬菜苗在分苗器的作用下分别通过分苗器形成的过苗间隙,由高速旋转的切割刀片切断,从而完成蔬菜苗的切割;由于多个切割刀片并列设置,可完成育苗穴盘一排蔬菜苗的切割,此时蔬菜苗穴盘在输送装置上不断前进,后续蔬菜苗不断经过切割刀片,从而实现蔬菜苗的连续切割。
实际育苗穴盘中的蔬菜苗并非全部竖直的,存在部分蔬菜苗倾斜生长的问题,这会影响切割装置的切割成功率和切割质量。为了解决这一问题,提出一种倾斜坡度的分苗器设计,如图3所示,该分苗器沿着蔬菜苗输送方向设置具有一定坡度的斜板,在蔬菜苗输送过程中,倾斜的蔬菜苗沿着斜板不断升高,最终逐渐扶正,从而保证切割刀片顺利切断蔬菜苗。
拨苗装置设计
在蔬菜苗切割完成后需要实现蔬菜苗与育苗穴盘的分离,为了实现这一操作,原装置采用叶片式拨苗装置。针对原叶片式拨苗装置存在的问题,提出一种拨苗装置的改进设计(图4)。拨苗装置包括:连接支架、调节支架、拨苗电机、拨苗轮、拨苗叶片等。拨苗轮上设置4片拨苗叶片,其中心轴与拨苗电机转轴连接,拨苗轮通过调节支架与连接底座连接,整个拨苗装置设置在切割装置之前,拨苗叶片位于切割装置的上方。该装置采用叶片旋转式拨苗方案,当育苗穴盘上一排蔬菜苗被切割装置切断时,旋转的拨苗叶片从切割装置上方通过,将切断的蔬菜苗拨至蔬菜苗输送装置,从而实现蔬菜苗与育苗穴盘的分离。
该拨苗叶片采用两段式结构,与拨苗轮连接部分为硬质金属材料,与蔬菜苗接触部分采用柔性橡胶材质,既可通过柔性接触减少蔬菜苗损伤,又可以减少秧苗缠绕情况。而且对拨苗装置的传动机构进行了优化,用电机直接驱动取代原皮带传动机构,以简化装置结构,提高传动效率。
输送装置设计
输送装置基本采用原输送装置的结构形式,主要对其结构尺寸进行微调,包括育苗穴盘输送装置和蔬菜苗输送装置,这两部分输送装置均采用独立的带式输送结构,可独立调节输送速度。穴盘输送装置设置在底部的装置支架上,其作用是输送育苗穴盘依次通过拨苗装置和切割装置,并将切割后的育苗穴盘输送至指定收集位置;蔬菜苗输送装置设置在切割装置之后,育苗穴盘输送装置的上方,采用倾斜向上的输送角度,其作用是将切断的蔬菜苗输送至滑槽的上端。
装置参数
根据所设计的切割输送装置的结构,建立蔬菜苗切割输送装置的三维虚拟样机(图5),装置基本参数如表1所示。
结论
本文针对蔬菜苗嫁接生产存在的问题,详细介绍了所提出的新型人机协作式蔬菜苗嫁接流水线的基本原理。结合对原蔬菜苗切割输送装置的试验研究,分析了其切割和拨苗装置存在的结构问题,并针对这些问题提出一种新型蔬菜苗高速切割输送装置的改进设计,详细分析了新切割装置、拨苗装置和输送装置的结构设计。改进后装置保持了原有的高效切割方式,具有较高的切割效率,同时避免了原装置存在的问题,将具有更好的蔬菜苗切割输送效果。
参考文献
[1] 王锋锋,刘明刚,吴晓峰, 等. 国内外苗木嫁接机器人研究现状及发展趋势[J]. 林业机械与木工设备,2011,39(1):16-18.
[2] 柏宗春,吕晓兰,陶建平. 国内外蔬菜嫁接机的研究现状[J]. 农业开发与装备,2017,23(3):76-79.
[3] 辜松,杨艳丽,张跃峰,等. 荷兰蔬菜种苗生产装备系统发展现状及对中国的启示[J]. 农业工程学报,2013,29(14):185-194.
[4] 张凯良,褚佳,张铁中,等. 蔬菜自动嫁接技术研究现状与发展分析[J]. 农业机械学报,2017,48(3):6-18.
[5] 罗军,高英武,何幸保. 自动嫁接机的研究现状与展望[J]. 时代农机,2010,37(2):1-2.
[6] 森川信也,西浦芳史,藤浦建史. 果菜类简易嫁接器具的开发研究(第1报)[J]. 农业机械学会志,2004,66(1):82-89.
[7] 森川信也,西浦芳史,藤浦建史. 果菜类简易嫁接器具的开发研究(第2报)[J]. 农业机械学会志,2004,66(2):105-111.
[8] Shin E S. Method of Manufacturing Grafting-pin[P]. Korean, KRl00197034(B1), 1999-06-15.
[9] ISO Group. ISO Graft 1200[EB/OL]. 2018-12-06,https: //www. iso-group. nl/en/ machines/iso-graft-1200.
[10] 辜松,李恺,初麒,等. 2JX-M系列蔬菜嫁接切削器作业试验[J]. 农业工程学报,2012,28(10):27-32.
[11] 田素博,宋传程,董嵩,等. 甜瓜贴接嫁接机切削装置工作参数优化与试验[J]. 农业工程学报,2016,32(22):86-92.
[12] 柏宗春,吕晓兰,夏礼如.蔬菜嫁接苗高速切割装置设计[J]. 农业工程学报,2019,35(17):35-42.
[13] 劉凯,杨艳丽,李恺,等. 流水线式茄科嫁接机砧木切削机构的试验研究[J]. 农业工程学报,2012,28(16):23-28.
[14] 徐丽明,张铁中,刘长青. 蔬菜自动嫁接机器人系统:旋转切削机构的设计[J]. 中国农业大学学报,2000,5(2):34-36.
