基于工业机器人虚拟仿真系统的教学研究
2020-05-25夏燕玲姚夏凌中水李陶胜
夏燕玲 姚夏 凌中水 李陶胜
摘 要:本文针对工业机器人的实际教学,将ABB工业机器人虚拟仿真软件Robotstudio应用在高职工业机器人技术专业的教学中进行研究。该软件在教学中实现工业机器人的认知、工作站的构建、建模功能的使用、离线轨迹编程、Smart动态组件的应用、ScreenMaker示教器用户的自定义界面等。同时梳理了Robotstudio虚拟仿真软件在课程设计中的意义,目的为培养高素质工业机器人技能型人才服务社会。
关键词:工业机器人;虚拟仿真软件;教学
1 绪论
自上世纪60年代首台机器人发明以来。机器人领域几乎渗透到世界的各个领域。机器人技术的发展水平已经成为一个衡量国家高新科技水平和工业自动化程度的重要标志[1]。工业机器人也是为了更好地落实《中国制造2025》总体部署,将机器人作为重点的发展领域,加快机器人产业的发展。工业机器人技术专业已被越来越多的院校开设,工业机器人作为一门新的专业备受学者们的青睐,但其硬件设施几十万到几百万不等,学校不可能拥有这样的资金储备各种各样的机器人系统,很多院校甚至没有硬件设备,这样远远不能满足要求[2]。虚拟仿真技术在工业机器人技术专业教学中成为必然。
2 Robotstudio仿真软件概述及优点
Robotstudio软件是ABB工业机器人配套的虚拟仿真软件。在Robotstudio中可以实现CAD导入、自动路径生成、碰撞检测、在线作业。模拟仿真、应用功能包以及二次开发等功能。将Robotstudio仿真软件应用到工业机器人技术专业教学中具有以下优势:(1)机器人仿真教学贴近实际应用,一套简单的工业机器人工作站需要几十万的资金,要使工业机器人技术应用满足在各行各业,那么教学需求应达到相同规模,这样的经费投入又限制了,不可能同时采购各种工业机器人系统,在这种学校实训资源不足的情况下,采用各种典型机器人虚拟仿真系统可以满足学生学习要求。(2)保障学生及设备安全,工业机器人作为机电一体化技术的高端载体,必须高度重视安全问题,保障学生人身安全的同事也要保障避免操作对设备的损害,在调试操作工业机器人的时候操作人员必须在安全范围内调试,对于实操教学过程中,学生对工业机器人没有一定了解的前提下操作机器人必然存在安全隐患。工业机器人课程采用仿真教学,学生在实际操作之前对工业机器人及其设备的结构,操作,轨迹规划有一定的直观印象。
3 Robotstudio在专业教学中的应用
3.1 构建仿真工业机器人工作站
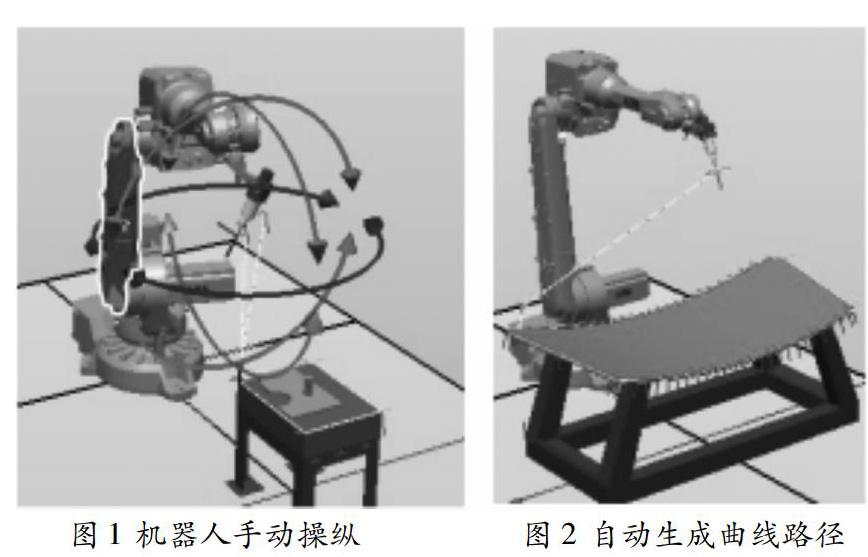
工业机器人仿真在机器人基础课程上进行学习,同时为后续学工业机器人离线编程、综合实训等做好铺垫。通过仿真软件构建工业机器人工作站,导入各种不同的ABB机器人模型,创建工作站后可以对机器人进行手动操纵,手动关节对机器人的六个关节轴进行操作,线性运动对机器人设定的工具的TCP点沿着X、Y、Z三个方向在空中运动,手动重定位可以使机器人第六轴法兰盘工具TCP点绕坐标轴旋转。通过单轴运动,位置和姿态的调整实时了解机器人状态如图1所示,学生可以全方位观察机器人运行状况,对机器人产生更加深刻的认识。
3.2 机器人的离线轨迹编程实践
工业机器人在应用过程中,一些规则的曲线可以采用示教指令的方法操作。而不規则的曲线,一般采用描点法,根据工艺精度示教一定数量目标点,生成轨迹,但这种方法费时、耗力且不能保证轨迹精度。可以根据3D模型曲线特征自动生成机器人运动轨迹,如图2的轨迹曲线就是利用Robotstudio自动生成的机器人激光切割路径[3]。经调试正常之后可传到机器人系统中运行,还可以对实际情况进行调整实现不规则曲线的操作。
3.3 动态Smart组件的应用
提高工业机器人的智能效率和可行性,可以使用该仿真软件的Smart组件,利用CAD、SolidWorks等三维建模软件绘制外围设备模型转换成Step格式导入仿真软件中,完成工作站的布局[4]。添加Smart动态输送链组件和动态夹具并对属性进行设置,通过参数设定,完成输送链动态效果仿真。通过工作站逻辑将机器人与动态Smart组件创建I/0通讯。可以将动态Smart组件仿真程序应用到实际生产。采用虚拟仿真不仅可以代替真实设备,节约了成本,提高教学的安全性和趣味性。
3.4 ScreenMarker的应用
ScreenMarker是创建用户自定义的工具,这种用户界面可以由多个屏幕组成,只需占用示教器用户窗口。使用该自定义的操作员界面可以实地简化机器人系统操作,在正确的时间将合理的操作员界面以正确的格式显示给用户。
4 结语
Robotstudio虚拟仿真软件引入到工业机器人技术专业教学中,很多机器人系统学生无法接触,通过该软件可以展现在他们眼前,通过在该软件中创建工业机器人工作站、实现机器人的离线轨迹编程,对外围设备进行动态组件的设置,利用ScreenMarker创建用户自定义界面等,提高了学生学习机器人的积极性。
参考文献:
[1]许文伟.用于室内导航的移动机器人视觉系统研究[D].西北工业大学,2007.
[2]孙守用.在高职工业机器人专业教学中的应[J].科技风,2019,29055:1671-7341.
[3]叶晖,等.工业机器人工程应用虚拟仿真教程[M].机械工业出版社,2013.
[4]王攻亮,王好臣,李振雨,李家鹏.基于Robotstudio的工业机器人输送链跟踪仿真[J].Chemical Engineering Journal,2009,150(2-3):527-535.
基金项目:安徽省质量工程教学研究项目(项目编号:2018jyxm0645,项目主持人:夏燕玲);基于新能源汽车车身覆盖件生产线气动机器人智能优化研究与应用(项目编号:KJ2019A1193)
