四轮驱动电动轮汽车主动变道系统的稳定性研究
2020-05-25段婷婷张玉稳姜绍忠
段婷婷 张玉稳 姜绍忠

摘 要:考虑汽车主动变道的安全距离模型对电动轮汽车主动变道系统的稳定性的影响,依据理想的整车稳定性状态参量,设计基于滑模-PID控制理论的控制器对整车的稳定性参数进行跟踪,并通过Carsim和Matlab/Simulink的联合在线仿真,验证该系统稳定性控制研究的可行性,从而保证较好的驾驶安全和行驶稳定,为电动轮汽车的主动安全乃至自动驾驶的开发提供理论基础。
关键词:制动距离;转向距离;滑模-PID;主动变道
随着汽车产业的不断升级,全球的节能环保和汽车安全问题也越来越受到重视。而伴随着汽车的智能化、电动化、国际化和共享化概念的兴起,主动变道系统的研究也开始热门起来[1]。国内外目前对四轮独立驱动电动轮汽车的研究主要集中在转矩协调控制和稳定性研究上,针对融合了主动安全的研究较少。Taehyun Shim等研发基于轨迹规划器、基于模型预测控制的主动前轮转向系统和轮矩分配系统的无人驾驶车辆的主动避撞系统[2]。该系统主要是用迹规划器规划好一条合理的最优路径,再基于模型预测控制器对汽车的转向系统和驱动系统进行转矩分配,以期达到最优的轨迹跟踪效果。李印祥等人提出在应急工况下的车辆应急变道的路径优化策略,提出双安全模型[3]。
1 动力学模型
1.1 整车模型
本文化繁为简,将复杂多变的整车系统简化成七自由度模型:
1.2 车轮模型
对电动轮汽车的车轮的受力分析可知:
2 控制策略
2.1 理想状态参量
整车二自由度车辆模型可得:
2.2 安全距离模型
当前方有车辆行驶时,也应考虑两车的相对距离和相对速度,故根据ECE法规和相关汽车的制动数据可得:
2.3 控制器设计
为增强电动轮汽车在主动变道工况下的稳定性控制器的抗干扰能力和自适应性,本文选择使用滑模控制器作为控制方法,考虑其抖振现象,合理取值滑模面的边界层厚度[4]。因此,横摆力矩的滑模控制律为:
3 控制结果及分析
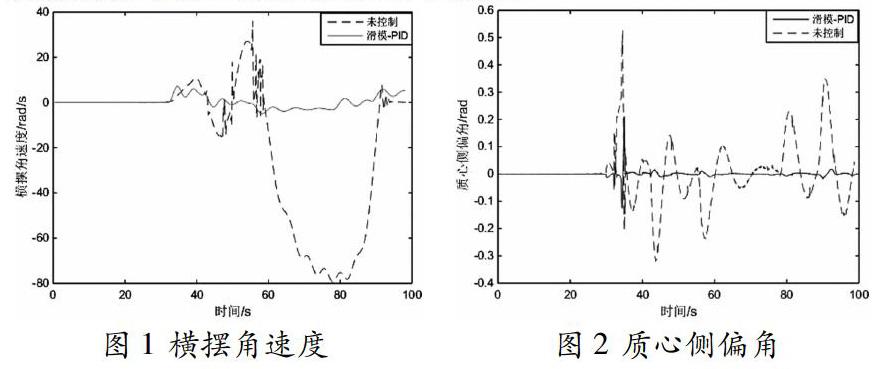
为验证滑模-PID控制器对电动轮汽车在主动变道工况下的稳定性的控制效果,本文设定车况速度为36km/h,并采用matlab/Simulink与Carsim联合在线仿真。图1和图2为车速为仿真的横摆角速度和质心侧偏角。与不加控制器相对比,滑模-PID控制下的横摆角速度值响应速度快,且振荡幅值较小,能较快的趋于稳定;质心侧偏角相较于未加控制的質心侧偏角的振荡值小很多,且迅速收敛于稳定。
4 结论
本项目在研究滑模原理和汽车安全的基础上,考虑主动变道安全距离模型对电动轮汽车稳定性影响,选择整车稳定性参数为控制变量,设计滑模-PID稳定性控制器,并通过carsim和simulink的在线联合仿真验证了该稳定性控制器效果较好,从而保证较好的驾驶安全和行驶稳定,为电动轮汽车的主动安全乃至自动驾驶的开发提供理论基础。
参考文献:
[1]边明远.基于紧急变道策略的汽车主动避障安全车距模型[J].重庆理工大学学报(自然科学),2012,26(04):1-4.
[2]Yu Z,et al.Hybrid trajectory planning for autonomous driving in highly constrained environments[J].IEEE Access,2018,6:32800-32819.
[3]李印祥.汽车主动制动/转向避障控制系统研究[D].合肥工业大学,2018.
[4]段婷婷,等.电动轮汽车驱动系统的滑模-PID控制[J].江苏大学学报(自然科学版),2015,36(03):260-264.
基金项目:天津市自然科学基金项目18JCTPJC52800;天津中德应用技术大学科研基金项目(zdkt2018-010)
