设施蔬菜智能灌溉控制系统的设计
2020-05-25杜太行邹军军孙曙光钱春阳
杜太行,邹军军,孙曙光,钱春阳,刘 德
(1.河北工业大学人工智能与数据科学学院,天津 300130;2.天津市农业科学院信息研究所,天津 300192)
随着互联网的不断发展,互联网和新兴技术的融合不断促进着国内农业的发展,并进一步演化为智慧农业。近年来,智慧农业在国内受到越来越多的关注。智慧农业将最新的信息技术如物联网、大数据、人工智能和人机交互应用于各种农业活动,并成为全球农业生产方式改革的重要趋势[1]。设施农业的发展是农业现代化的重要标志之一,也是智慧农业发展的重要任务。大棚智能控制作为设施蔬菜种植过程中的重要环节,是保障农产品数量和质量、提高水分利用率的重要举措[2]。
国家统计局数据显示,我国农业灌溉用水量占总用水量的60%以上,实现农田的节水灌溉已成当务之急[3]。传统的依赖于农户通过经验判断是否需要灌溉和漫灌、喷灌等灌溉方式是导致水资源浪费严重的主要原因[4]。以往所设计的智能灌溉控制系统中,主要以检测到的土壤当前湿度和最佳湿度作为对比,当实时湿度小于最佳湿度下限时则对植株进行适当灌溉从而达到节水目的,但由于不同地区的土壤成分差异,湿度不能反映出土壤水分对植物的有效性,土壤水势则具有更广泛的适用性[5]。本文以最佳土壤水势为依据,控制电磁阀的启停时间,可以推广至不同地区土壤的蔬菜种植,并基于此设计了设施蔬菜智能灌溉控制系统。
1 系统总体结构
该系统主要针对设施蔬菜的智能灌溉控制,通过传感器技术、无线传输技术、人工智能技术和数据库技术等相结合,实现农田数据采集功能、无线传输功能、智能决策功能、实时监控功能和灌溉执行功能,可以同时对多个温室大棚进行智能化灌溉。系统共分为4个模块,总体结构如图1所示。
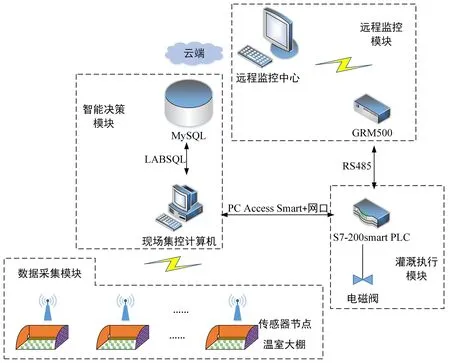
图1 系统总体结构
2 数据采集模块
无线传感网络作为整个智能控制系统的感知层,具备感知核心信息的能力。为了避免现场布线带来的各种问题,本系统采用自主设计的无线土壤水势测量仪,该测量仪采用低功耗太阳能辅助锂电池供电,集成短距离无线传输模块,并具有数据自动存储功能。土壤水势是指从土壤中吸取单位水分所需要引起的能量,土壤水分饱和,水势为零,含水量低于饱和状态,水势为负值,通过传感器顶端陶瓷头表面细小而均匀的孔隙来透过水溶液而阻隔土壤颗粒,使仪器内部产生负压值,以此来表示土壤含水状况。测量仪采用TI公司STM32F103RCT6芯片作为MCU,具有体积小、性能强、成本低、功耗少等优点,STM32内部集成了16通道12位ADC,可满足一般情况下对于A/D功能的要求。单片机内部对仪器内部负压信号进行A/D转换,获取实时数据进行粗差剔除后存储在TF卡中,有效减少了外界环境的影响,避免人工读数带来的误差。
为了解决田间多点位监测的需要,测量仪使用短距离无线数传模块APC240将采集到的数据封装成帧,然后通过射频天线上传至系统内。APC240采用半双工信道,可快速实现星型结构网络连接,工作频段为433MHz和470 MHz,传输距离可达700 m,具有较强的抗干扰能力。此外,嵌入的低功耗射频芯片sx1212和ST单片机,发射频率仅为10 MW,有效保证了续航时间,上位机采用MySQL作为系统的数据库,接收和存储土壤水势测量仪的数据。土壤水势测量仪结构如图2所示。
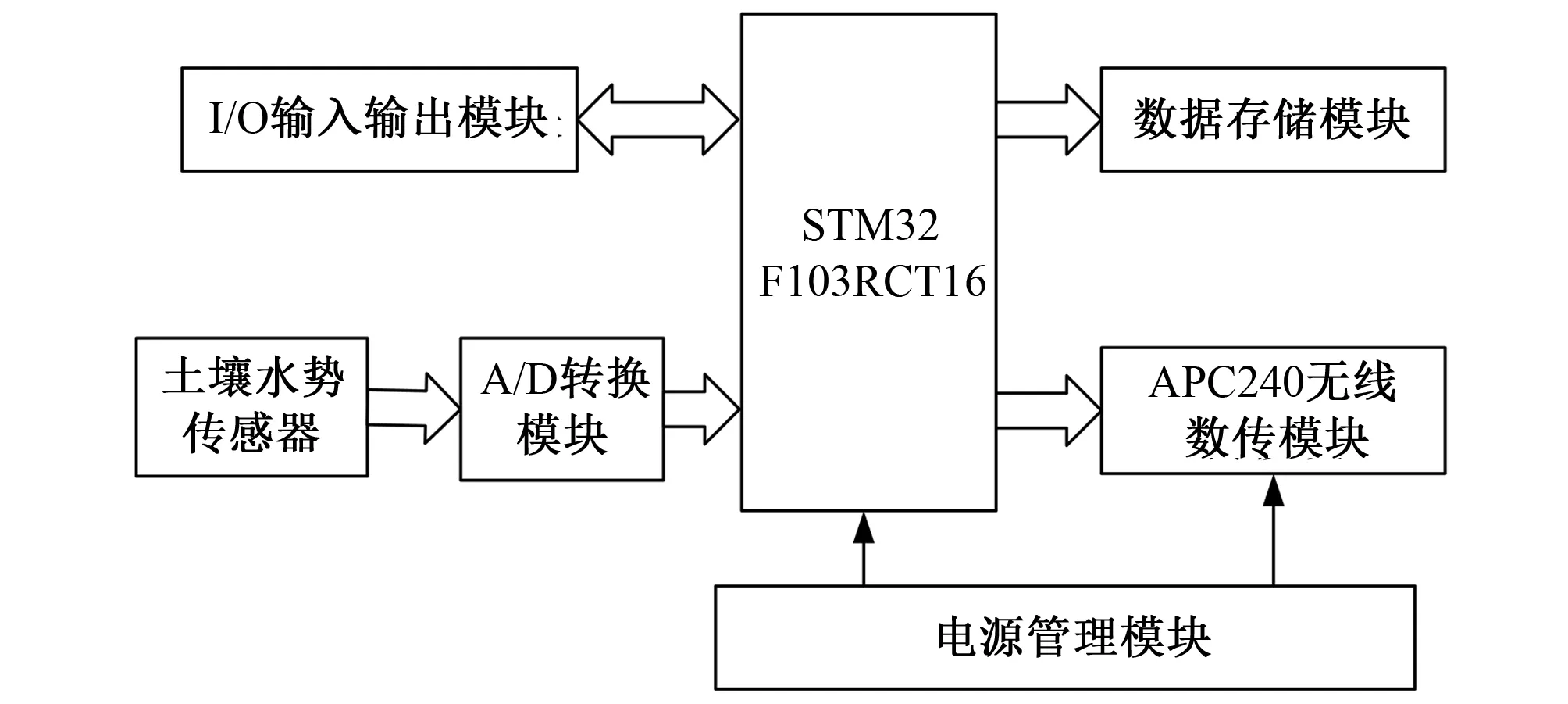
图2 土壤水势测量仪硬件结构图
3 智能决策模块
3.1 智能决策流程
智能灌溉决策的功能主要由现场集控计算机实现,现场集控中心一体机硬件配置如下:CPU:Intel(R) Core(TM)i5-3317U @1.70 GHz 1.70 GHz;安装内存(RAM):8.00 GB;系统类型:Win7 64位操作系统;硬盘容量:250 G 。一体机采用Labview2013作为软件平台,应用第三方数据库访问工具包LabSQL对数据库进行管理,其中ADO Connection Open模块用于对数据库的连接验证和访问,SQL Execute模块对数据库进行查询和修改,现场集控计算机的智能决策流程如图3所示。
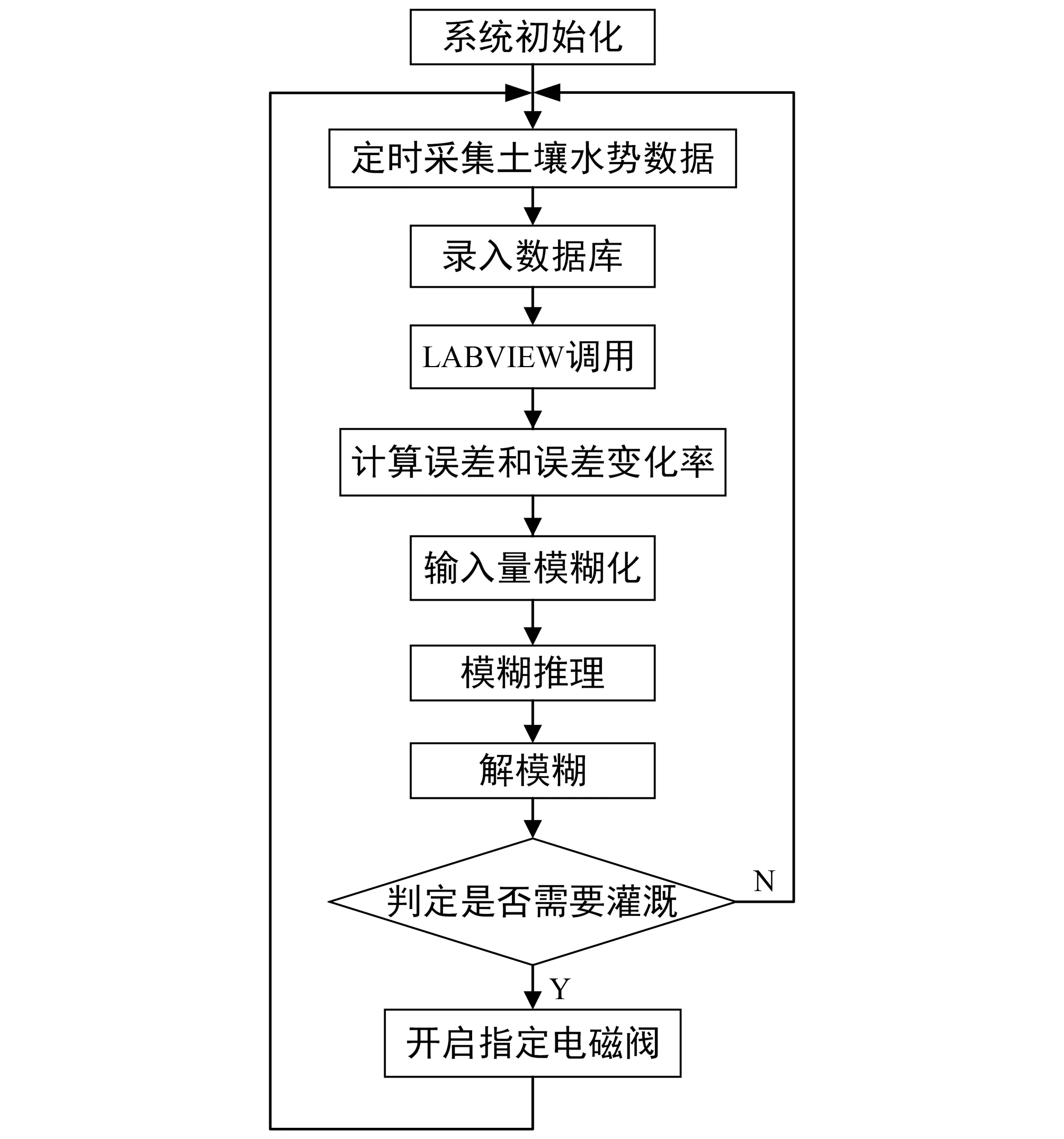
图3 智能决策流程图
3.2 模糊控制器设计
由于土壤大惯性、非线性的特征,很难确定具体的数学模型,所以采用模糊控制的方法,在专家的灌溉建议和大量灌溉经验基础上以自然语言的形式表现在控制规则上[6]。选择双输入单输出的Mamdani型模糊控制器作为推理机,实时土壤水势与理想水势差值(E)和差值变化率(EC)为输入量,最佳灌溉时长(U)作为输出量。模糊控制系统结构如图4所示,先把算得的两个输入量映射至模糊域,再输入到模糊控制器中,根据规则库进行模糊推理,最后解模糊得到电磁阀开启时间。利用模糊控制器分析处理土壤水势数据,配合规则库中丰富的种植经验,有效提高了灌溉决策的准确性,以土壤水势为测量参数的方式也广泛适用于各地区不同类型土壤的智能灌溉。
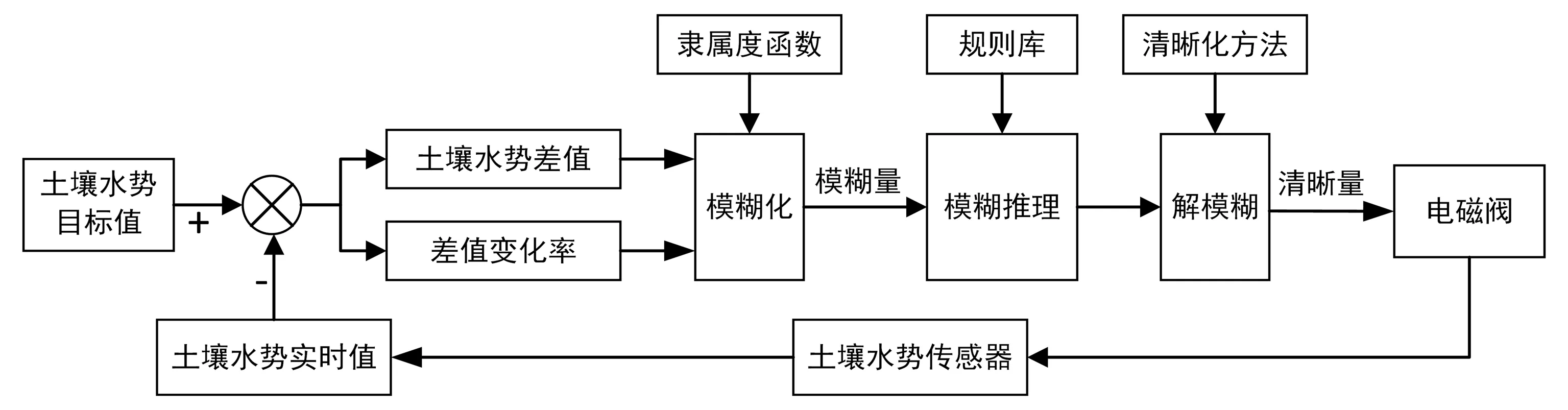
图4 模糊控制系统结构
不同作物在不同生长生理期对水分的需求量也有差别[7],本文以经济作物黄瓜结果期的模糊决策为例进行探讨。黄瓜根系分布于基质下25 cm范围内,属于浅根类植物,水分需求量大,不耐旱,综合考虑结果期产量和水分利用率因素,土壤水势在-10~-5 kPa时既能节约灌溉用水,又能达到单株最大产量[8]。设置土壤水势目标值为-5 kPa,土壤水势下限为-10 kPa,晴天条件下实验测得土壤水势由-5 kPa下降至-10 kPa时间约为70 h,最大差值变化率为6%。温室环境内不会受到外界降水的影响,且作物灌溉过于频繁会加剧病虫害发生,所以模糊控制器每70 h工作1次,以保证黄瓜生长在最佳土壤湿度,土壤水势从-10 kPa到-5 kPa电磁阀需要开启的时间为15 min。
土壤水势差值E的物理论域为[0,5],模糊语言变量分7个等级,记为{NB,NM,NS,ZE,PS,PM,PB},模糊论域为{0,1,2,3,4,5,6}。土壤水势差值变化率EC和电磁阀开启时间U的物理论域分别为[0,6%]和[0,15],模糊语言变量分成6个等级,记为{NM,NS,ZE,PS,PM,PB},模糊论域为{0,1,2,3,4,5}。三角形隶属度函数在坐标轴上呈线性分布,具有设计简单、输出平滑的特点[9],因此E、EC和U均采用三角形隶属度函数,E的隶属度函数如图5所示。EC和U的隶属度函数与E类似。
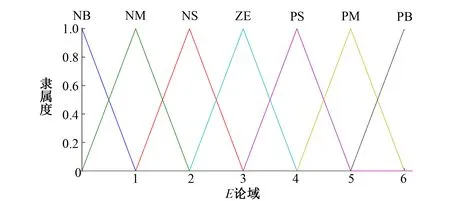
图5 输入量E隶属度函数
根据专家经验及前期实验数据总结得出模糊控制规则如表1所示。
为检验控制效果,将上述输入和输出的隶属度函数及分布和模糊控制规则写入LabVIEW的fuzzy system designer内,双输入单输出控制器的语言式规则采用如“if ‘E’ is ‘NB’ AND ‘EC’ is ‘NM’ THEN ‘U’ is ‘PM’”表示。Mamdani型控制器以最小运算法为模糊蕴含关系方法进行模糊推理,隶属度函数最大原则选择控制量,清晰化方法为面积重心法。输出特性曲面如图6所示,可以发现该控制器响应速度快,输出精细,变化平缓。
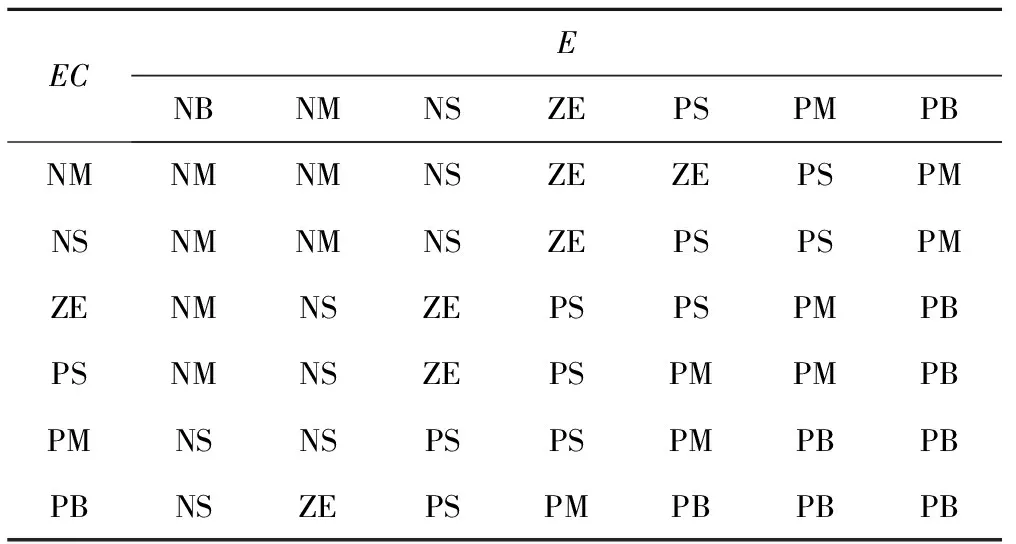
表1 模糊控制规则
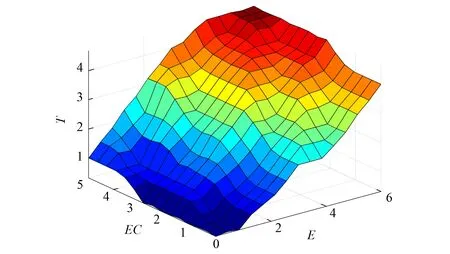
图6 输出特性曲面
4 远程监控模块
实时监控分为现场集控计算机的实时监控和远程监控中心的数据显示,现场集控计算机采用Labview访问数据库的方式读取数据库中各温室土壤水势的历史记录。远程监控中心是农户与灌溉系统交互的接口,为了方便农户在家中也能实时接收田间数据,远程端在MySQL授权下以root用户登录到服务器,输入对应的用户名密码即可实现远程连接进行数据监控。农户可以远程控制灌溉的实施离不开系统的远程传输功能,本文选用GRM500作为智能远程控制终端,支持Modbus通信协议,与PLC通过RS485相连,工业级嵌入式ARM处理器具有极强的稳定性,支持WCDMA协议,利用运营商3G网络与远程监控端实时通讯,传输距离不受限制。
5 灌溉执行模块
为保障灌溉执行机构的稳定运行,本文选取微处理器为ST30的西门子S7-200 SMART作为现场可编程逻辑控制器来驱动电磁阀。该PLC的CPU模块集成一个RS485接口和一个以太网端口,支持TCP/IP协议,可同时接收现场主机和无线传输端发来的指令。S7-200 SMART具有18个输入点和12个输出点,每个输出点可以控制一个电磁阀,现场集控计算机在PC Access SMART创建西门子的OPC Server,并在Labview中绑定变量实现对PLC的变量输出操作。同理为了进行远程控制,建立无线传输端和PLC之间的地址映射,实现手动控制和智能控制可切换的控制模式。
电磁阀选取型号为顺绿SLPGA的直流常闭电磁阀,该电磁阀具有灵敏度高,稳定性好,功耗低等优点。额定电压12 V,工作压力0.1~1.04 MPa,最大流速30 m3/h,额定功率为4.5 W,采用双重过滤防止堵塞电磁线圈,耐久度良好。灌溉方式选用滴灌法,结合施肥可使水分利用率达到95%,肥效提高1倍以上[10]。
6 智能灌溉控制系统测试
控制系统运行后,现场集控计算机界面显示各温室大棚作物的理想水势,并以柱状图形式显示出实时水势,无人干预下系统自主做出决策。当某个大棚的电磁阀开启灌溉时,相应的状态灯也会亮起,用户也可以手动选择灌溉或停止灌溉。控制系统的界面如图7所示。
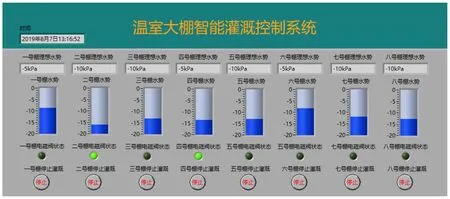
图7 智能灌溉控制系统界面
7 结 语
本文在掌握我国设施农业智能灌溉发展现状的基础上,以适用性更加广泛的土壤水势作为控制目标,LabVIEW为平台设计了一套基于模糊控制方法的设施蔬菜智能灌溉控制系统,以相应的软件设计实现了田间土壤水势数据的采集、数据的无线传输、智能灌溉决策、远程监控等功能。在以后的研究中,还需在系统中增加空气温湿度、光照、二氧化碳含量等传感器及相应的无线通信模块,完善针对不同作物各个生长周期的模糊控制规则,提高控制系统的精确度,从而实现精准灌溉。