基于模型预测控制的桥式起重机荷载消摆控制研究
2020-05-21刘卉
刘卉


摘 要:针对桥式起重机荷载运动的模型,采用一种线性时变模型预测控制方法。通过建立桥式起重机荷载运动三维模型,对模型进行线性化处理得到系统线性化方程,设计线性时变模型预测控制器,对加入预测控制前后的荷载运动的轨迹跟踪效果、系统控制量、状态量的变化进行对比分析,研究其消摆控制效果。仿真分析表明,荷载的运动轨迹能快速且平稳的跟踪上参考轨迹,从而实现消摆控制。
关键词:模型预测控制;桥式起重机;荷载消摆;轨迹跟踪
中图分类号:TP273 文献标志码:A 文章编号:2095-2945(2020)15-0016-03
Abstract: A linear time-varying model predictive control method is adopted for the load movement model of bridge crane. Through the establishment of the three-dimensional model of the load movement of the bridge crane, the system linearization equation is obtained by linearizing the model, and the linear time-varying model predictive controller is designed. The track tracking effect, system control quantity and state quantity variation of the load movement before and after the addition of the predictive control are compared and analyzed, the anti swing control effect is studied. The simulation results show that the load trajectory can track the upper reference trajectory quickly and stably, so as to realize the anti sway control.
Keywords: model predictive control; bridge crane; load swing control; trajectory tracking
引言
起重機作为一种运载机械,被广泛应用于工矿企业和交通运输等领域。一方面要求起重机有较高的运输效率及定位精度;另一方面,研究可以有效地抑制荷载摆动的控制策略,保证工作场地的人员安全,具有工程实际意义。研究人员已对起重机荷载运动系统的消摆提出了各种控制策略。这些方法一类是开环控制,即不需要摆角信息的轨道生成法,主要有输入整形技术和最优控制。另一类是闭环控制,即利用由传感器系统测量到的摆角信息实现消摆控制,该方法经历了线性控制、非线性控制以及智能控制三个阶段。本文选用智能控制中的模型预测控制,在每一采样时刻,根据获得的当前测量信息,在线求解一个有限时域开环优化问题,并将得到的控制序列的第一个元素作用于被控对象,循环往复,从而达到消摆控制的效果。
1 桥式起重机荷载运动三维模型构建
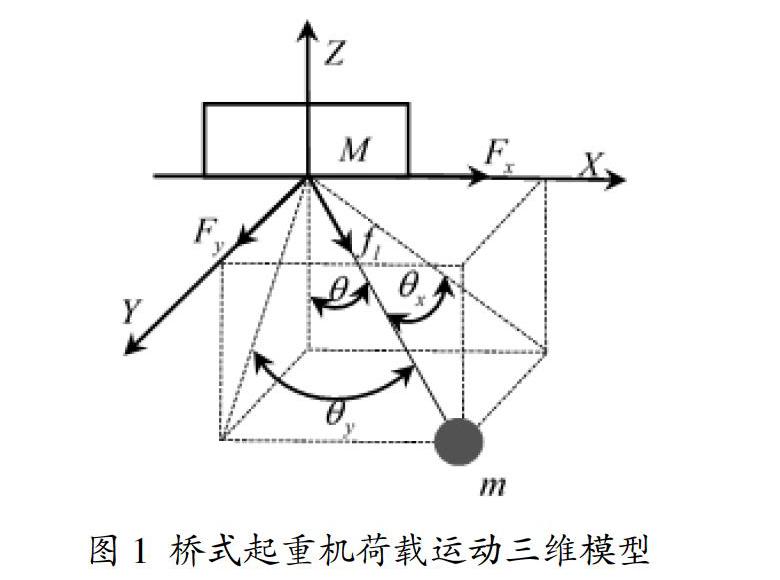
当桥式起重机小车运动机构做横向运动,大车运行机构做纵向运动,同时荷载进行升降运动,则荷载可以看作在三维平面内运动,建立其三维简化模型,如图1所示。
设小车质量Mx,大车质量My,荷载质量m,二者用长度为l的轻质钢丝绳连接。小车受到沿x轴方向的驱动力Fx,沿y轴方向的驱动力Fy,钢丝绳张力fl。钢丝绳与z轴方向夹角为θ,荷载与x轴夹角θx,与y轴夹角θy。荷载视为质点,绳子质量、风扰动、弹性作用等其他外界因素忽略不计,当荷载摆角足够小时,对模型进行线性化处理,得到系统线性化方程:
则系统的状态方程为:
式中系统状态矩阵为:
2 线性时变模型预测控制器设计
2.1 系统目标函数设计
首先进行离散化处理,得到:
为了保证起重机荷载运动轨迹能迅速稳定地跟踪上期望轨迹,目标函数中需要加入对系统状态量偏差和控制量的优化,采用如下形式的目标函数来设计轨迹跟踪器:
上前项表示系统对预期轨迹的跟踪能力,后项表示对控制量变化的约束。该函数由于无法对每个采样周期内的控制增量进行限制,即无法避免被控系统控制量突变的现象,因此使用软约束方法,得到目标函数:
其中预测时域Np,控制时域Nc,权重系数ρ,松弛因子为?着,控制量取代控制量并且加入了松弛因子ε,这样不仅能对控制增量进行直接限制,也能防止执行过程中出现没有可行解的情况。在目标函数中,需要计算未来一段时间系统的输出,以下基于桥式起重机线性时变误差模型预测预测未来时刻的输出:
得出一个新的状态空间表达式:
为简化计算,做出如下假设:
经推导得到系统在下一时刻输出预测表达式:
2.2 约束条件设计
主要考虑被控过程中的控制量极限和控制增量的约束,控制量表达式为:
控制增量约束为:
在目标函数中,求解的变量为控制时域内的控制增量,约束条件也只能以控制增量或者是控制增量与转换矩阵相乘的形式出现,需要进行转换,得到MPC在每个控制周期内求解完成后,得到控制时域内的控制输入增量:
由MPC的基本原理,将被控序列中的首个元素作为输入增量作用于系统:
系统对这一控制量进行处理,并根据状态量预测下一周期输出,并通过优化得到新的控制增量序列,如此滚动优化直到系统完成控制过程。
3系统仿真与分析
桥式起重机荷载运动参数设定为:小车质量Mx=50kg,大车质量My=50kg,荷载质量m=20kg,绳长为l=2m,μ=0.2,重力加速度g=9.8m/s2。在Matlab环境下对桥式起重机荷载运动三维模型的消摆跟踪过程进行仿真。同样设定期望的跟踪参考轨迹为y=2,从坐标原点进行轨迹跟踪,仿真时间设为20s,下图中(a)(b)分别表示未加入和加入模型预测控制器的荷载轨迹跟踪效果。
图2所示的桥式起重机荷载运动三维模型轨迹跟踪效果对比,曲线点轨迹为荷载在每一时刻的实际位置,直线为参考的目标轨迹,阴影部分为预测时域内荷载位置在此刻预测到的下一时刻预测位置。在加入模型预测控制器作用下,荷載的轨迹运动运动能快速且平稳地跟踪上参考轨迹直线,并按照参考轨迹保持稳定直线运行。
从图3-4可以看出,系统控制量和状态量随时间变化的图像中可以看出,荷载在存在误差的初始状态环境下,预测控制的轨迹跟踪算法能够使荷载运动实际输出轨迹快速且平稳的跟踪上参考输入。
从图5可以看出,加入线性时变模型预测控制算法后,荷载运动摆角从开始的振荡到逐渐趋于稳定,控制的效果明显。
4 结束语
本文将线性时变模型预测控制算法应用于桥式起重机三维荷载运动系统中,取得了一定的消除摆动幅度的控制效果。就目前大多数的消摆控制算法而言,几乎都是针对某几项性能进行设计的,而单一的控制策略已经不能满足起重机复杂运动机构的荷载运动的消摆控制。将论文提出的预测控制方法与传统的控制算法,如经典的PID控制、具有实时性的模糊控制、具有学习能力的神经网络控制等结合起来,将是接下来研究的一大方向。
参考文献:
[1]刘岩松,王宗彦,石瑞敏,等.基于高斯伪谱法的双摆桥式起重机消摆策略分析[J].科学技术与工程,2020,20(01):189-195.
[2]胡富元,邵雪卷,张井岗.基于模型预测算法的桥式起重机消摆控制[J].控制工程,2019,26(07):1378-1383.
[3]杨立颖.桥架起重机防晃控制非线性系统建模与研究[J].计算机测量与控制,2020,28(02):103-107.
[4]姚亮,肖人源.基于模型的回转式液压起重机消摆控制仿真研究[J].自动化应用,2016(01):14-16.
[5]朱发渊,汪朝晖,李欣欣.桥式起重机定位和消摆的非线性优化PID控制研究[J].制造业自动化,2014,36(24):76-79+100.
