无人机影像密集点云中目标层次提取研究
2020-05-21路创军
路创军
(甘肃省水利水电勘测设计研究院有限责任公司,甘肃 兰州 730000)
随着“数字地球”“智慧城市”的快速发展,全面而准确地获取地理空间信息数据(尤其是高精度的三维空间信息)具有迫切的应用需求。当前,快速准确获取大范围三维场景目标的主要技术有机载激光雷达扫描(Airborne Light Detection and Ranging,LiDAR)和摄影测量技术。LiDAR技术通过回波测距与定向的原理,获取高精度的数字三维信息数据,但其昂贵的硬件设备限制了其大范围推广应用。摄影测量技术能够从多张具有相互重叠的二维数字影像中恢复目标物体表面的三维信息,其主要依赖同名影像之间的同名点匹配来完成。近年来,以无人机为平台的摄影测量技术具有成本低、周期短、操作简单、时效性强及快速获取高分辨率影像数据的特点,已逐渐成为大范围区域内对地观测与高精度三维场景目标信息获取的最主要手段。
在影像密集点云的生成过程中,引入先进的半全局影像密集匹配方法(SGM)、全局图能量优化算法(Graph Cut)等密集匹配算法,可以极大地提高影像密集匹配点云(Image Dense Point Cloud, IDPC)的精度和可靠性。同时,在Middleubry3.0以及KITTI2015数据集中基于深度学习的影像重建方法得到世界最先进的影像重建结果。从高密度、噪声较大的IDPC中提取目标对象,主要有逐点提取、逐块提取和场景整体分类提取等方法。逐点提取以每个点为基本单元,并通过该点的局部描述及其关系作为特征并进行分类,该方法简单易于实现,但其存在计算量大、单点邻域包含信息不稳健等缺点。逐块分类提取首先将三维点云处理为独立几何单元块,然后将各块进行组合得到分类结果。该方法能够利用场景中的不同特征提高分类精度,但其难以保留上下文关系容易出现碎片化的结果。场景整体分类提取包括传统条件随机场和基于深度学习方法。基于条件随机场的方法在获取分类结果的同时,还可以得到相互之间的上下文关系,但其模型学习和推导中存在计算复杂的问题。伴随AI热潮兴起的深度学习方法,能够直接输入三维点云数据并输出分类结果,但其需要耗费大量人力进行样本数据标注,且预先训练网络模型存在难以直接迁移应用于新场景等问题。同时,这些不同的研究方法主要用于质量较好的LiDAR点云目标对象提取。因此,从IDPC中提取不同目标对象仍然是一个挑战性研究课题。本文针对无人机影像密集点云中三维目标对象的提取问题,提出了一套有效可行的地理空间三维目标对象提取流程与方法。
1 影像密集点云生成
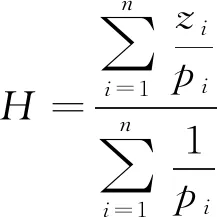
在获取低空无人机航摄影像后,通过在各影像上提取特征点及执行特征点匹配,并结合地面控制点和光束法平差模型,解算出每一个影像的精确位姿参数,同时在空间交会、相机参数全局平差优化的过程中可以匹配点的三维空间位置,进而完成稀疏点云匹配。以此为基础,可引入半全局影像密集匹配算法(SGM)完成逐像素匹配以获取目标场景的三维密集点云。SGM考虑了视差变化并给予了不同的惩罚,以保护倾斜面和曲面的微小视差变化,其视差影像能量模型如下:


(1)
在上述算法模型的基础上,通过输入原始影像、POS数据、相机参数文件、控制点文件,自动完成区域的自动空三解算,通过人工干预的半自动刺点,实现影像密集点云自动生成。其流程如图1所示:

图1 影像密集点云生成流程图
考虑到影像密集匹配过程中,由于影像纹理弱、质量差或匹配算法本身限制等,生成的影像密集点云中不可避免存在着噪声点,因此本文通过点云三角网与离散曲率粗糙度进行点云噪声点的检测与剔除。
2 影像密集点云层次提取
采用层次化的方式提取点云,不仅能够降低算法复杂度,同时有效地提高处理速度,也可以避免点云冗余信息干扰。为了能够方便、高效地处理空间离散且分布不均匀的IDPC,本文首先构建了规则格网索引,同时格网单元中只保留一个高程值最小的点作为格网点的数值。依据经验,格网大小按下式计算:

(2)
式中,ρ—单位面积内点云个数。
2.1 地面点云滤波
从三维点云中提取出地形基础数据,称为点云滤波处理。这是开展基于三维点云的后续应用的关键,特别是数字高程模型(DEM)生成的关键。点云滤波的关键在于如何设计和计算地面点与非地面点特征差异,如何构建有效的点云提取策略。为实现影像密集点云中地面点云滤波处理,本文在规则格网的基础上,采用多尺度形态学原理来剔除地面点。首先任意设置一个较小的尺寸S进行形态学滤波处理,然后更新尺寸S直至所有格网点都处理完毕。形态学“开”和“关”运算步骤可描述如下:
(1)腐蚀操作。对于IDPC中的每一个格网点,获取其在给定窗口内点的最小高程值作为腐蚀后高程。
(2)膨胀操作。再次对IDPC中每个格网点,采用上述腐蚀处理同样大小的窗口进行膨胀运算,将最大高程值作为膨胀后的高程
(3)提取操作。对于上述处理后的每个格网点,如果膨胀处理后高程值与原始高程值的差值在给定阈值范围内,那么当前格网点是一个地面点,否则为非地面点。
上述多尺度形态学处理可实现格网点由粗到细的渐进式处理,能够有效提高点云滤波的质量和可靠性。对于地面点,可以通过反距离加权模型生成DEM。
(3)

(4)
式中,(X,Y,H)—待插值点空间坐标;(Xi,Yi,Hi)—邻域样本点i的空间坐标;p—空间距离权重值;q—幂函数值。
2.2 建筑物点云提取
滤波处理后剩余的非地面点云,主要存在建筑物、植被等地物目标。为进一步提取出建筑物点云数据,本文拟构建基于建筑物区域特有几何或物理特征的提取方法,即首先剔除明显非建筑物目标点云,然后在此基础上,通过计算点的粗糙度以细化处理建筑物点云。
通常情况下,经过去噪、滤波处理后的IDPC中建筑物主要是屋顶面,其可看作一个或多个面片构成,通过设置合理约束规则可实现非建筑物目标剔除,其处理过程描述如下:
(1)对滤波处理后的点云,逐点分析其连通性,将空间位置邻近、几何属性相似的点进行合并,从而形成新的目标区域。几何属性可采用法向量夹角、颜色等。
(2)以建筑物目标的面积、几何尺寸、点云与地面的高度约束等作为约束条件,对上一步形成的目标区域进行过滤提取。
(3)上述过程迭代执行直至所有的点云处理完毕。
需要注意的是,目标区域几何面积与建筑物类型是密切相关的,根据经验可设置为2~100m2,目标区域的几何尺寸等可设置为2~10m。相比于在城市周边或乡村居民区域,城市中建筑物面积、几何尺寸等应设置较大的阈值,以提取出非建筑物目标点云。
2.3 植被点云提取
经过上述处理后,地面和建筑物点云被较好地提取出来,剩余点云即为植被点云。然而在建筑物和树木混合的区域,植被点云容易被误分为建筑物点云。为实现植被点云的完整提取,本文采用点云剖面特征分析方法进行区分处理,即不同目标(如植被、建筑物)在竖直Z方向上的不同剖面具有目标自身独特空间特性,如图2—3所示。一般来说,树木的树冠剖面面积远大于树干剖面面积,而建筑物剖面面积则保持一定大小不变,且建筑物的平均剖面面积明显大于树木的平均剖面面积。因此,通过分析点云在竖直Z方向上的
空间剖面特征,可以从建筑物点云中进一步提取出冗余的植被点云。
3 应用实例与结果
为了验证本文提出的无人机影像密集点云不同目标对象提取的有效性,本文利用了甘肃省引洮供水二期配套工程秦安县城乡供水青林沟工程的航飞成果进行了实验验证与分析。该研究区域位于甘肃省秦安县,区域内困难程度划分为中等,植被地物较密。试验影像采用某科技公司的V100飞机系列V-CAM100航测模块搭载SONY RX1R II相机进行影像采集,中心区域的航向重叠度为80%,旁向重叠度为75%,无人机飞行航线架次及序列影像示意如图4所示。
对上述无人机序列影像实施空三处理和密集匹配处理,获取的影像密集点云如图5所示,影像密集点云密度为50point/m2。
采用本文的多尺度形态学方法提取地面点云,并采用本文的反距离加权模型加密内插生成分辨率为50cm的数字地面模型,如图6所示。
在地面点云剔除基础上,采用本文层次方法提取出建筑物和植被点云如图7—8所示。

图2 建筑物点云剖面特征示意图

图3 植被点云剖面特征示意图
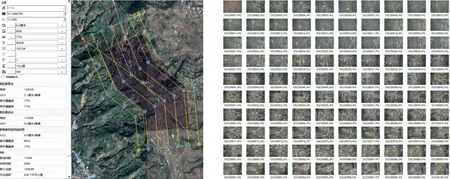
图4 测区无人机序列影像缩略图

图5 典型区域的无人机影像密集点云(左:建筑物、右:典型植被)

图6 典型区域的数字地面模型(左:建筑物、右:典型植被)
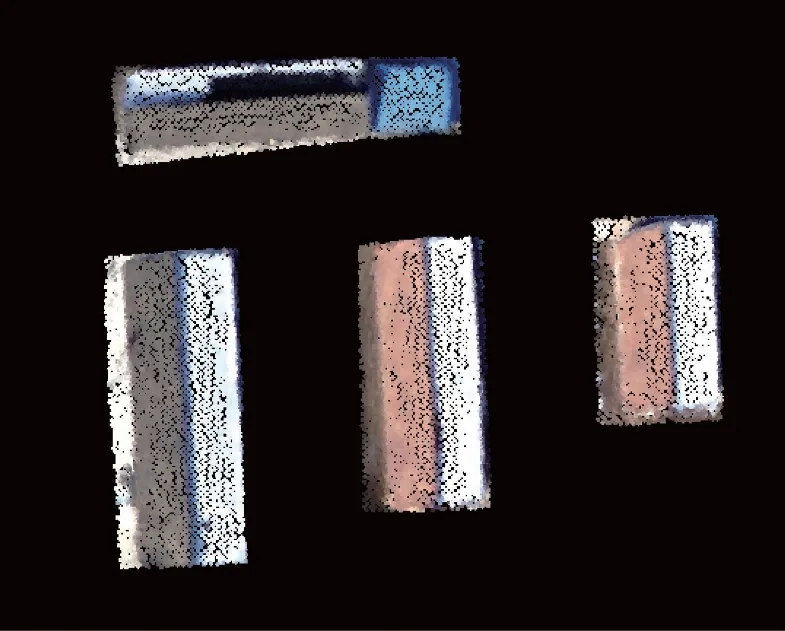
图7 建筑物点云

图8 植被点云
4 结语
针对从空间离散且分布不均的无人机影像密集点云中不同地物目标难以有效提取的问题,本文提出了一种有效的地物目标层次化提取流程框架。通过实际项目进行了验证,其结果表明本方法能实现无人机影像密集点云中地物目标的有效提取,能够为建筑物密集群、高植被区域DEM制作和灾害防治提供参考借鉴。但在原始森林或过密的植被区域存在植被点云提取不全的问题,可通过人工交互编辑或算法模型改进来解决。同时,后续将以提出的不同目标对象为基础,开展研究不同地物目标的三维模型构建及其地理空间应用分析的相关研究。