高分辨率光学卫星测绘技术综述
2020-05-21李德仁王密
李德仁 王密
高分辨率光学卫星测绘技术综述
李德仁 王密
(武汉大学测绘遥感信息工程国家重点实验室,武汉 430079)
从第一颗人造卫星的成功发射到如今日益丰富的高分辨率遥感卫星,基于卫星平台的航天摄影测量已经成为大中比例尺地形图测制和修测的主要手段。高分辨率卫星立体测绘的实现离不开高精度测绘处理技术的不断进步。文章对高分辨率光学卫星的三种典型测绘(三线阵、双线阵和单线阵/面阵)方式及特点进行了分析,对测绘处理涉及的几何关键技术进行了介绍,最后结合中国测绘卫星发射规划,对未来智能遥感卫星服务应用模式下航天摄影测量的发展进行了展望。
立体测绘 测绘处理 智能服务 高分辨率光学卫星
0 引言
1957年第一颗人造卫星成功发射,使得基于卫星平台的航天摄影测量成为可能。1986年法国发射SPOT-1卫星,第一次基于卫星平台实现相邻轨道的侧视,获取异轨立体影像对[1]。1999年美国发射IKONOS卫星,空间分辨率为1m,是世界上第一颗高分辨率商业卫星,利用卫星平台姿态机动能力实现同轨和异轨多角度立体成像[2]。2002年法国发射SPOT系列第5颗卫星,具备单线阵异轨立体成像和双线阵同轨立体成像能力[3]。2005年印度发射CartoSAT-1(IRS P5)卫星,空间分辨率为2.5m,采用前视26°、后视5°的双线阵相机进行立体观测[4]。2006年日本发射ALOS卫星,星上搭载的全色遥感立体测绘仪(PRISM)传感器实现了三线阵立体测绘,3台相机交会角为24°,地面像元分辨率为2.5m[5]。后续美国和法国分别发射了空间分辨率优于0.5m的WorldView系列卫星和Pleiades-1卫星星座,均可进行多角度成像获取立体影像对。此外,美国发射的Skysat系列视频小卫星也可以实现立体观测,其采用面阵传感器,通过灵活的姿态指向控制,以不同角度连续高帧频成像,能获得多种基高比的立体像对[6]。
近些年来,中国也相继发射了多个系列高分辨率立体测绘卫星。2010年发射的“天绘一号”系列01星(02星和03星分别于2012和2015年先后发射)实现了中国传输型立体测绘卫星“零”的突破,5m分辨率的三线阵相机能够测制1∶50 000比例尺地形图[7];2012年发射的“资源三号”系列01星(02星于2016年发射)是中国自主设计和发射的第一颗民用高分辨率立体测绘卫星,搭载前后视3.5m、正视2.1m的三线阵相机,主要用于1∶50 000立体测图[8];2015年发射的“吉林一号”系列视频01星和02星(视频03~06星于2017年发射,视频07、08星于2018年发射)采用面阵成像方式实现多角度连续拍摄,地面分辨率为1.13m[9];2019年发射的“高分七号”(GF-7)卫星是中国首颗民用亚米级高分辨率立体测绘卫星,双线阵立体相机的空间分辨率达0.65m,能够用于中国1∶10 000立体测图及更大比例尺基础地理信息产品的更新。GF-7卫星的成功发射开启了中国亚米级卫星测绘新时代。
本文根据航天摄影测量的技术发展,对高分辨率光学卫星立体测绘的三种典型方式:三线阵、双线阵和单线阵/面阵的测绘方式和特点以及测绘处理的关键技术进行了分析,对卫星摄影测量的未来发展进行了展望。
1 典型测绘方式及特点
航天摄影测量类似于人眼的立体视觉,从一个观测视角获取的单幅影像只能确定物点的空间方向,从不同视角观测的两幅及以上相互重叠影像构成的立体像对,通过前方交会确定物点的空间位置。光学卫星传感器可分为面阵和线阵两种类型,当前高分辨率光学卫星多采用线阵传感器推扫成像,而面阵传感器更有利于连续拍摄获取视频影像,是高分辨率敏捷卫星传感器的一种选择[6]。将高分辨率敏捷卫星线阵传感器和面阵传感器的立体成像方式统一称为单线阵/面阵测绘方式,根据目前航天摄影测量的技术发展,高分辨率卫星测绘方式可分为三种类型:三线阵、双线阵和单线阵/面阵。
1.1 三线阵测绘成像特点
星载三线阵测绘采用三台线阵相机按照不同的角度安装构成的三线阵立体测绘相机,沿卫星飞行方向推扫,即可能够近乎同时地获取固定基高比的三视同轨立体影像。如图1所示,前视相机沿飞行方向向前倾斜成像,后视相机向后倾斜成像,正视相机垂直对地成像。由于垂直对地成像可以将地形起伏引起的投影差降低到最小,并且能获取相对较高的空间分辨率,正视影像可以用于生成高分辨率正射影像。同一成像时刻,三台相机分别对地成像,相机视角不同导致三台相机成像时间存在一定的延迟(如图2所示),前视相机在1时刻先对地面点成像得到像点1,随着卫星沿飞行方向推扫,正视相机和后视相机再依次对地面点成像,分别在2和3时刻得到像点2和3,基于摄影测量原理,同名摄影光线1、2以及3通过前方交会,可以得到地面点的物方三维坐标,从而实现卫星的高程测量能力。星载三线阵测绘的优点是不需要卫星平台敏捷机动,按照卫星运行的回归周期即可获得覆盖全球的固定基高比的三线阵立体影像,适合全球尺度的测绘应用。

图1 三线阵立体成像方式
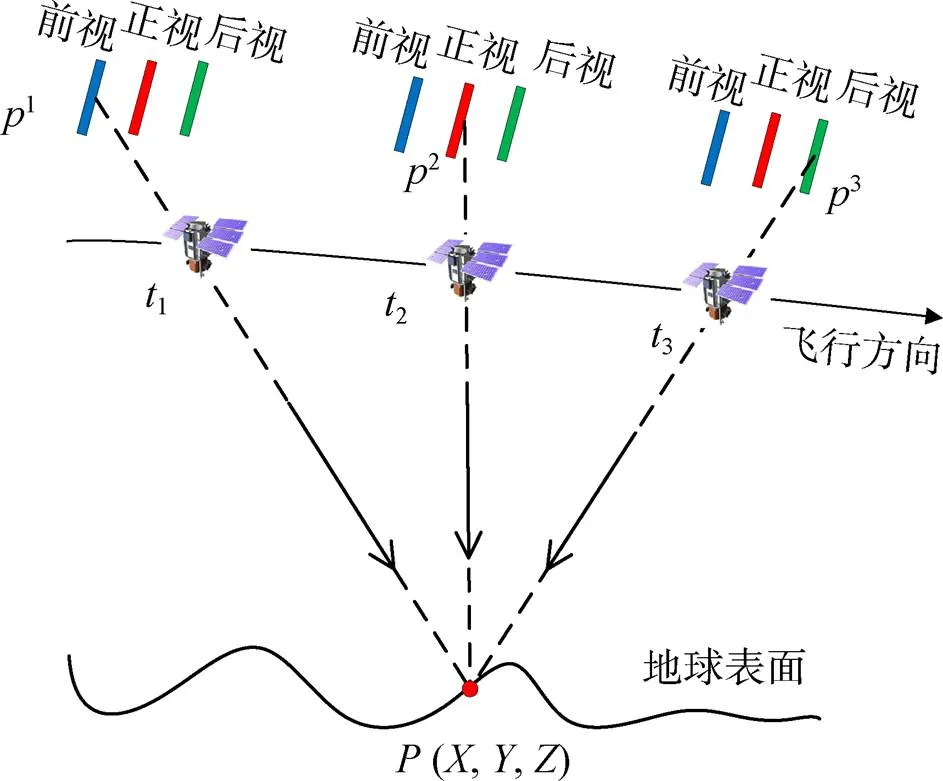
图2 三线阵立体测量原理
1.2 双线阵测绘成像特点
双线阵测绘方式与三线阵类似,采用两台相机按照不同的角度安装构成两线阵立体测绘相机(如图3所示),两台前、后视相机以固定的交会角对地推扫成像,获取两视立体影像对。双线阵相机通常采用前视视轴与星下点成+26°夹角、后视视轴与星下点成–5°夹角的交会设计,例如CartoSAT-1、GF-7卫星的双线阵相机,这样的立体观测方式有利于减小大高差的遮挡问题,同时近似垂直对地成像的后视相机可以用于生成正射影像。同三线阵相机相比,双线阵相机的载荷数量较少,载荷设计更加简化,通过任务规划进行区域立体成像,更加适合更大比例尺的重点区域测绘。
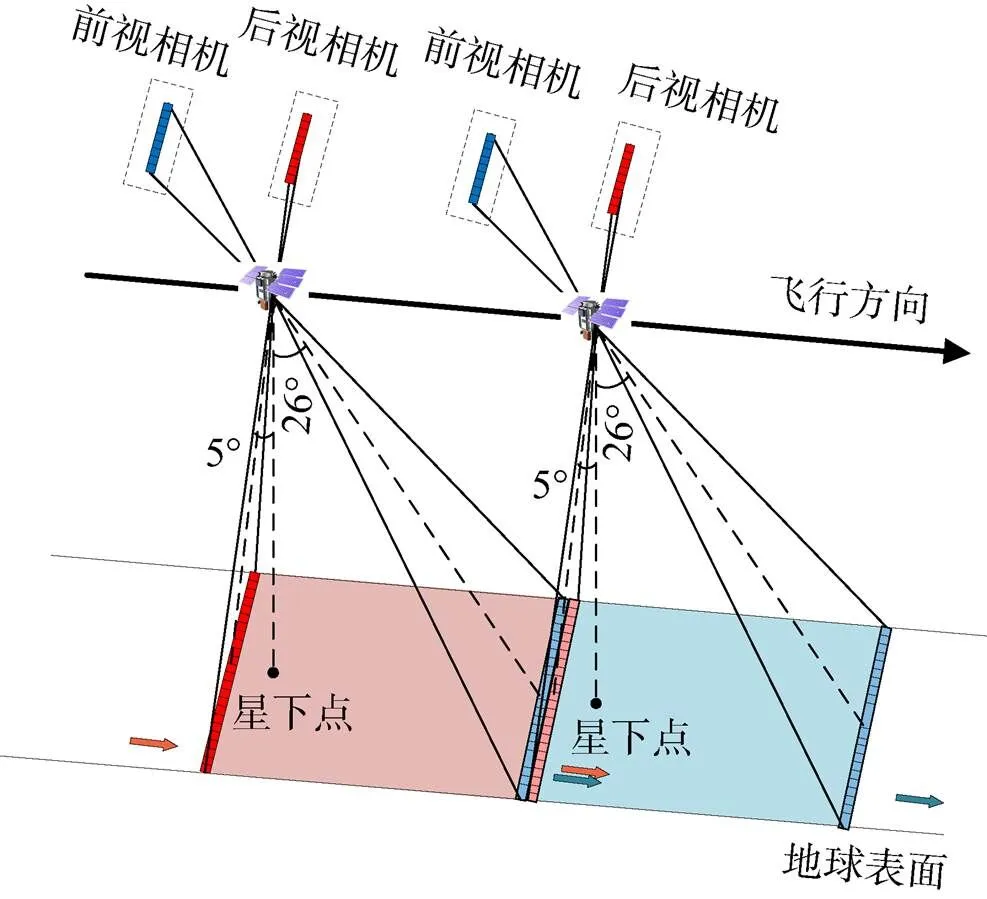
图3 双线阵立体成像方式
1.3 单线阵/面阵测绘成像特点
随着高精度、高稳定、高敏捷平台技术的发展,高分辨率光学遥感卫星不断向多角度成像、小型敏捷等方向发展,具备较强的姿态机动成像能力,可通过侧摆、俯仰、偏航角灵活调整对地成像,基于立体测量的原理,单个相机也可以实现立体观测。
单线阵/面阵测绘相机可以根据姿态机动的方式进行同轨和异轨两种立体成像模式。依赖一轨过境期间卫星成像俯仰和偏航姿态角的调整,在沿轨方向进行交会成像,实现同轨立体观测(如图4);在不同轨道下,利用卫星侧摆和偏航角调整,对同一地面区域过境成像,在垂轨方向进行交会成像,实现异轨立体观测(如图5)。异轨立体观测获取立体影像的时间间隔较长,云层遮挡也会影响再次过境影像的获取效率,限制其在大规模立体测图中的应用,目前很少采用该种模式;同轨立体观测能在一轨中相隔较短时间对同一地区成像,立体影像获取的时效性较强。单线阵/面阵测绘可以获取不同基高比的高分辨率立体像对,适合大比例尺的局部测绘。

图4 单线阵/面阵同轨立体成像方式
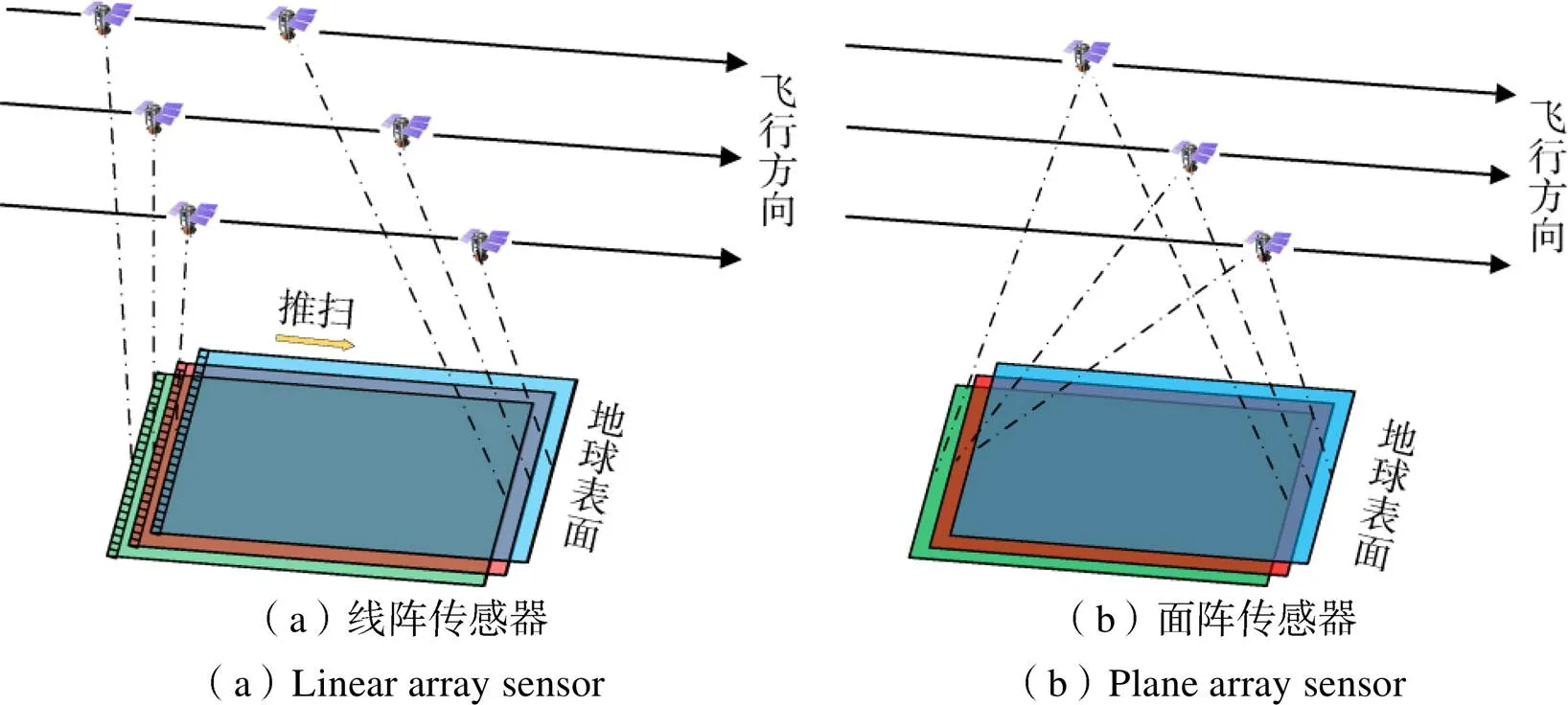
图5 单线阵/面阵异轨立体成像方式
1.4 对比分析
三种典型测试方式具有各自的成像优势和特点,主要总结如下:
1)三线阵和双线阵测绘都采用多相机组合的成像方式实现立体成像,一次拍摄便能得到多景不同观测视角的影像,数据获取的效率有明显的优势;立体观测过程中不依赖高敏捷机动的航天卫星平台设计技术,且成像过程中三轴稳定,成像稳定性较好,数据保真度较高;但机动能力欠佳,数据获取能力受到轨道位置限制而较局限。
2)单线阵/面阵测绘依靠高敏捷和高稳定的卫星平台机动控制能力进行立体观测,其具有更加灵活的优势,主要体现在:a)多角度、多视成像,单线阵/面阵相机在姿态机动能力允许的条件下,可进行两视以上多角度成像,而三线阵/双线阵立体成像角度单一;b)交会角度自主可控,单线阵/面阵相机依靠卫星平台灵活的机动能力,立体观测交会角度及基高比可根据不同的地形地貌(平地、丘陵、山地)通过自主规划控制最优,具有最高的理论精度。
3)三线阵相机前、后视成像交会角较大,可以构成较大的基高比的立体像对,理论上高程测量精度较优;双线阵相机前、后视成像交会角有限,较小的基高比限制了其高程测绘精度;单线阵/面阵测绘成像体制虽然立体观测更加灵活,但受到卫星平台姿态控制、姿态机动等平台硬件水平的限制,且影像交会条件、几何特性较复杂,影响立体测绘高程相对精度水平。
2 测绘处理关键技术
高分辨率卫星复杂的空间运行环境极易导致对地成像链路中存在多种系统和非系统性观测误差,直接影响影像的几何定位精度[10],难以满足立体测图的高精度应用需求。利用一定的几何处理方法消除和补偿影像中的各种误差,提升影像的几何质量是高分辨率卫星立体测图的前提和关键。高分辨率卫星测绘处理关键技术主要涉及在轨几何定标、高精度传感器校正和区域网平差处理,分别针对影像中的系统误差、内部畸变和姿轨观测偶然误差进行修正与处理。
2.1 在轨几何定标
高分辨率卫星发射及运行过程中载荷状态会发生较大改变,地面测量的各类设备安装、相机镜头畸变等关键参数值会发生变化,必须采用在轨几何定标方法对在轨成像几何参数重新进行精确标定[11-14]。在轨几何定标通过对成像过程中系统误差的精确估计,获取星上真实几何成像参数。
通常将几何系统误差分为外部系统误差(如空间环境引起的相机安装角度变形)和内部系统误差(相机内部主点、主距及镜头光学畸变、探测器探元畸变等误差),并分别进行外部参数和内部参数的标定[15-16]。外部参数只需利用少量控制点即可进行解算,而内部参数定标需要对探测器每个探元指向系统误差进行检测,要求提供大量控制约束条件。根据控制信息的获取方式,在轨几何定标方法可分为两种:基于地面定标场的传统方法和自主几何定标方法。
传统基于地面定标场的在轨几何定标方法是利用卫星在轨获取的定标场影像,通过与高精度定标场的数字正射影像(Digital Orthophoto Map,DOM)和数字高程模型(Digital Elevation Model,DEM)数据进行影像匹配,获取密集控制点,基于单像空间后方交会方法精确确定内外定标参数,处理流程如图6。
自主几何定标方法是在高分辨率卫星机动成像能力下,利用相机在轨获取不同观测视角的多景影像,通过影像匹配得到连接点信息,基于同名光线空间相交的几何约束关系,实现内部参数的自主标定。只需依赖少量的控制点(外业控制点或通过部分影像与地面定标场匹配自动获取)对外部参数进行标定,极大地减少了对参考数据的依赖[17-18]。
对于三线阵以及双线阵测绘相机,由于相机间存在一定夹角的安装关系,为了保证获取的三视/二视立体影像间的相对几何精度,在轨几何定标时还需要顾及相机间的相对安装关系。地面定标场数量及分布有限,利用一个定标场对三台/两台相机外部参数标定后,由于三台/两台相机对同一定标场的成像时刻不一致,各相机外定标参数会吸收不同程度的姿态漂移误差,需要重新标定相机间的相对安装关系。如图7和图8,采用定标场和少量外业控制点联合的控制方案,对三线阵/双线阵相机进行几何定标。对于三线阵相机,基于定标场对前、后、正视相机分别进行几何定标后,再利用前视和后视相机沿轨一小段成像区域内各均匀布设的少量外业控制点,重新对前、后视相机的外定标参数进行解算;对于双线阵相机,基于定标场对前、后视相机分别进行几何定标,再利用前后相机的连接点和控制点精确标定相机之间的相对安装关系。

图6 基于地面定标场在轨几何定标方式流程

图7 三线阵相机外部参数标定的控制方案

图8 双线阵相机外部参数标定的控制方案
对于单线阵/面阵测绘相机,卫星平台的敏捷机动能力更加灵活,单线阵/面阵相机可以快速获取多视重叠影像,而三线阵/双线阵卫星平台的机动能力较差获取同一区域的多景同源影像的成像周期较长。短时间周期内获取的多视影像间的辐射特性较接近,同名像点的匹配精度更高,单线阵/面阵相机更有利于开展高精度、高时效的自主几何定标。
2.2 高精度传感器校正
高分辨率星载相机设计结构较为复杂(如:折反光路结构、多片拼接等设计)[9],影像内部存在非线性畸变、片间拼接错位等问题,原始影像难以直接应用。必须进行高精度传感器校正处理,以优化影像内部几何精度,获取高精度整景影像,同时生成高精度的有理多项式系数(Rational Polynomial Coefficient, RPC)参数,为后续应用提供几何数据基础。
基于稳态重成像的传感器校正方法通过设计一条虚拟线阵/面阵,模拟原始线阵/面阵的成像过程,以获取整景影像,其具有严密的几何理论基础,是一种基于几何成像模型的高精度物方校正方法,在光学卫星地面预处理中广泛应用,例如“资源一号”02C[19]、“资源三号”[20]、“高分二号”[21]、“高分六号”[22]等卫星影像均采用该种方法实现了高精度校正。该方法首先在焦面上设计一个完整的虚拟线阵/面阵,图9为表示虚拟线阵/面阵与原始分片线阵/面阵在相机坐标系c-ccc中的位置示意图,两者共享相机焦距和主点参数;基于几何定标获取的精确成像几何参数,以及经过平滑处理的姿态和轨道数据,确定稳定成像状态下虚拟线阵/面阵的严格几何成像模型;再基于地形无关方法[23]利用虚拟控制点生成高拟合精度的RPC参数,以完全替代不便于计算的严格几何成像模型,提供影像的几何定位信息;最后在参考DEM辅助下,基于物方定位一致性建立原始分片影像与虚拟影像坐标间的几何映射关系(如图10)。首先将原始分片影像中的像点坐标(,)(表示像点)通过坐标正投影计算对应的物方坐标(,,),再将物方坐标通过坐标反投影得到对应的虚拟影像像点坐标(i,j),最后对虚拟影像进行灰度赋值,获得无缝拼接的完整影像。同时为了避免引入过多的DEM高程误差而影响整景影像的内部精度,虚拟线阵/面阵的位置应尽可能与真实线阵/面阵位置接近,保证原始成像视角与虚拟成像视角的差异最小[22]。

图9 虚拟线阵/面阵焦面位置示意图

图10 原始影像与虚拟影像坐标映射流程图
2.3 区域网平差处理
由于区域内不同成像时间的多景影像成像状态存在差异,姿态、轨道等测量值具有不同程度的随机误差,单景影像传感器校正后仍无法实现高精度的绝对定位,且影像间几何定位精度存在不一致的问题,同名光线难以交于一点,影响区域影像高精度测图。然而,在多次成像时姿轨随机观测误差会变为服从正态分布的随机变量,区域网平差处理对服从正态分布的随机误差具有补偿效果。
区域网平差是利用区域内相邻影像间同名像点连接关系,在少量控制点或无控制点条件下,按照一定的平差模型来修正区域内所有影像的几何成像模型,在提高单景影像的几何定位精度的同时消除影像间的相对几何误差,保证影像间物方定位的一致性,为后续区域影像拼接提供高精度几何基础。在传感器校正生成的RPC模型基础上,结合附加参数变换模型(平移变换、仿射变换等)构建区域网平差模型[20,24],以单景影像作为平差单元进行平差处理。
随着星上轨道和姿态测量精度的逐步提升,星载激光测高仪、全球DEM等多源摄影测量数据的涌现,无地面控制点区域网平差是卫星测绘处理的必然,目前发展的无控制平差方法主要有:1)基于虚拟控制点的区域网平差方法[25-26],利用各景待平差影像的初始RPC模型,计算像方坐标系I-下像点对应物方坐标系下物点的坐标(如图11),生成虚拟控制点,将虚拟控制点作为带权观测值引入平差模型;2)激光测高数据辅助的区域网平差方法[27-28],当确定立体影像连接点物方坐标(0,0,0)的初始高程值0时以高精度的激光测高数据代替(如图12),提升无控平差后模型的高程精度;3)DEM数据辅助的区域网平差方法[29-30],在平差过程中引入DEM高程值对同名像点物方高程坐标进行约束(如图13),利用DEM参考高程H(表示迭代次数)替代立体影像连接点高程坐标0,以改善小基高比影像平差中物方高程难以收敛的问题。

图11 虚拟控制点生成
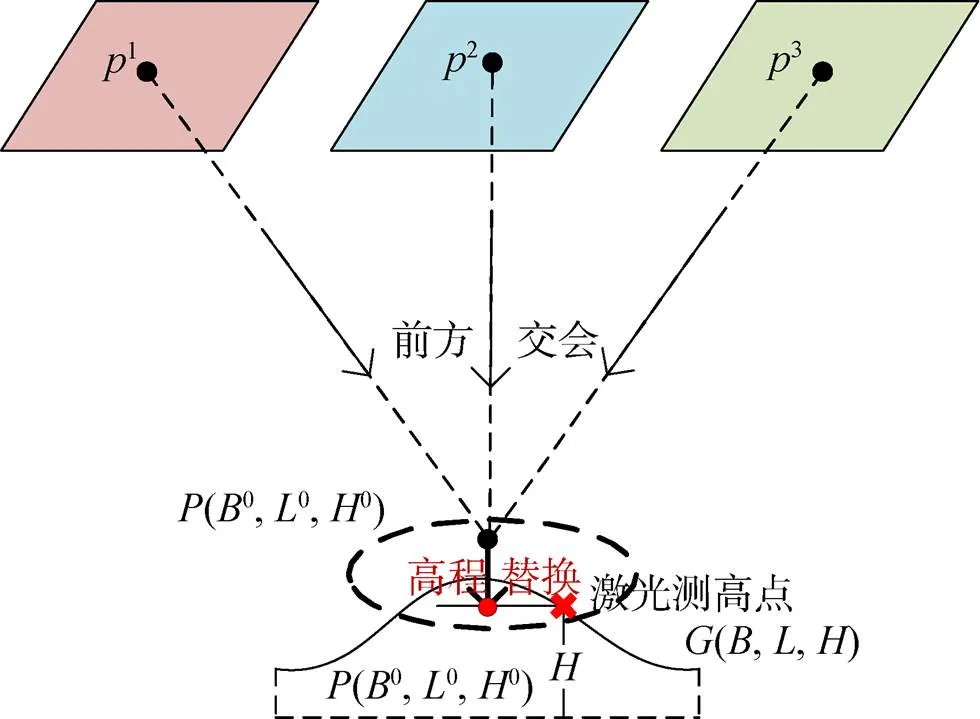
图12 激光测高数据确定连接点物方高程坐标

图13 DEM高程值约束
3 总结与展望
本文系统介绍了当前高分辨率卫星三种典型立体测绘方式的成像特点,并重点介绍了立体测绘几何处理中的关键技术。三种测绘方式具有各自的成像特点,三线阵和双线阵在平台技术复杂度和测绘效率上有一定优势,单线阵/面阵立体观测的成像方式、交会角度更加灵活多样。随着高分辨率卫星观测和测量性能、敏捷机动能力的不断提高,以及测绘处理关键技术的不断进步,传统依赖控制数据的处理技术逐渐转向自主、无控制的自动化处理。
根据2015年发布的国家空间基础设施规划(2015—2025年),中国后续也将继续发射多颗三线阵/双线阵测绘卫星,包括“资源三号”03和04星、与“高分七号”卫星组网的“高分七号”02星等,逐步构建系列比例尺光学测绘卫星星座。武汉大学牵头正在研制的光学智能遥感卫星“珞珈三号”01星,比传统敏捷卫星具备更加智能的应用服务模式,能够根据用户需求实现智能规划和智能处理,将人工智能技术与摄影测量技术进行融合,给高分辨率光学卫星测绘提供了新的应用模式。未来中国高分辨率卫星立体测绘成像模式不断丰富,高分辨率卫星星座不断构建,通导遥一体化空天信息实时智能服务系统建设不断推进,航天摄影测量的应用潜能将不断充分发挥。
致谢:
感谢国家自然科学资金委员会重大集成项目(项目号:91738302)的支持。感谢郭贝贝博士生在论文写作过程中提供的帮助。
[1] 杨明辉. 21世纪的地形测绘[J]. 测绘科学, 2006, 31(2): 13-15. YANG Minghui. Topographic Mapping in the 21st Century[J]. Science of Surveying and Mapping, 2006, 31(2): 13-15. (in Chinese)
[2] 唐新明, 谢俊峰, 张过. 测绘卫星技术总体发展和现状[J]. 航天返回与遥感, 2012, 33(3): 17-24. TANG Xinming, XIE Junfeng, ZHANG Guo. Development and Status of Mapping Satellite Technology[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(3): 17-24. (in Chinese)
[3] BOUILLON A, BERNARD M, GIGORD P, et al. SPOT 5 HRS Geometric Performances: Using Block Adjustment as a Key Issue to Improve Quality of DEM Generation[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2006, 60(3): 134-146.
[4] MURALIKRISHNAN S, PILLAI A, NARENDER B, et al. Validation of Indian National DEM from Cartosat-1 Data[J]. Journal of the Indian Society of Remote Sensing, 2013, 41(1): 1-13.
[5] TADONO T, SHIMADA M, MURAKAMI H, et al. Calibration of PRISM and AVNIR-2 onboard ALOS “Daichi”[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(12): 4042-4050.
[6] 满益云, 李海超. 低轨视频卫星成像特性分析[J]. 航天器工程, 2015, 24(5): 52-57. MAN Yiyun, LI Haichao. Imaging Characteristics Analysis for LEO Video Satellite[J]. Spacecraft Engineering, 2015, 24(5): 52-57. (in Chinese)
[7] 王任享, 胡莘, 王新义, 等. “天绘一号”卫星工程建设与应用[J]. 遥感学报, 2012, 16(S1): 2-5. WANG Renxiang, HU Xin, WANG Xinyi, et al. The Construction and Application of Mapping Satellite-1 Engineering[J]. Journal of Remote Sensing, 2012, 16(S1): 2-5. (in Chinese)
[8] 李德仁. 我国第一颗民用三线阵立体测图卫星——资源三号测绘卫星[J]. 测绘学报, 2012, 41(3): 317-322. LI Deren. China’s First Civilian Three-line-array Stereo Mapping Satellite: ZY-3[J]. Acta Geodaetica et Cartographica Sinica, 2012, 41(3): 317-322. (in Chinese)
[9] 李贝贝, 韩冰, 田甜, 等. 吉林一号视频卫星应用现状与未来发展[J]. 卫星应用, 2018(3): 23-27. LI Beibei, HAN Bing, TIAN Tian, et al. Application Status and Future Development of Jilin-1 Video Satellite[J]. Satellite Applications, 2018(3): 23-27. (in Chinese)
[10] 龚健雅, 王密, 杨博. 高分辨率光学卫星遥感影像高精度无地面控制精确处理的理论与方法[J]. 测绘学报, 2017, 46(10), 1255-1261. GONG Jianya, WANG Mi, YANG Bo. High-precision Geometric Processing Theory and Method of High-resolution Optical Remote Sensing Satellite Imagery Without GCP[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(10), 1255-1261. (in Chinese)
[11] GRODECKI J, LUTES J. IKONOS Geometric Calibrations[C]//Proceedings of the ASPRS 2005 Annual Conference. 2005: 07-11.
[12] MULAWA D. On-orbit Geometric Calibration of the OrbView-3 High Resolution Imaging Satellite[J]. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci, 2004, 35: 1-6.
[13] CAO J, YUAN X, GONG J. Inorbit Geometric Calibration and Validation of ZY-3 Three-line Cameras Based on CCD-detector Look Angles[J]. The Photogrammetric Record, 2015, 30(150): 211-226.
[14] 雷蓉. 星载线阵传感器在轨几何定标的理论与算法研究[D]. 郑州: 信息工程大学, 2011. LEI Rong. Study on Theory and Algorithm of In-flight Geometric Calibration of Spaceborne Linear Array Sensor[D]. Zhengzhou: Information Engineering University, 2011. (in Chinese)
[15] WANG M, YANG B, HU F, et al. On-orbit Geometric Calibration Model and Its Applications for High-resolution Optical Satellite Imagery[J]. Remote Sensing, 2014, 6(5): 4391-4408.
[16] WANG M, CHENG Y, CHANG X, et al. On-orbit Geometric Calibration and Geometric Quality Assessment for the High-resolution Geostationary Optical Satellite Gaofen4[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 125: 63-77.
[17] CHENG Y, WANG M, JIN S, et al. New On-orbit Geometric Interior Parameters Self-calibration Approach Based on Three-view Stereoscopic Images from High-resolution Multi-TDI-CCD Optical Satellites[J]. Optics Express, 2018, 26(6): 7475-7493.
[18] DELVIT J M, GRESLOU D, AMBERG V, et al. Attitude Assessment Using Pleiades-HR Capabilities[J]. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2012, 39(B1): 525-530.
[19] 潘俊, 胡芬, 王密, 等. 基于虚拟线阵的ZY-102C卫星HR相机内视场拼接方法[J]. 武汉大学学报(信息科学版), 2015, 40(4): 436-443. PAN Jun, HU Fen, WANG Mi, et al. Inner FOV Stitching of ZY-1 02C HR Camera Based on Virtual CCD Line[J]. Geomatics and Information Science of Wuhan University, 2015, 40(4): 436-443. (in Chinese)
[20] 潘红播, 张过, 唐新明, 等. 资源三号测绘卫星传感器校正产品几何模型[J]. 测绘学报, 2013, 42(4): 516-522. PAN Hongbo, ZHANG Guo, TANG Xinming, et al. The Geometrical Model of Sensor Corrected Products for ZY-3 Satellite[J]. Acta Geodaetica et Cartographica Sinica, 2013, 42(4): 516-522. (in Chinese)
[21] CHENG Y, JIN S, WANG M, et al. Image Mosaicking Approach for a Double-camera System in the Gaofen2 Optical Remote Sensing Satellite Based on The Big Virtual Camera[J]. Sensors, 2017, 17(6): 1441.
[22] WANG M, CHENG Y, GUO B, et al. Parameters Determination and Sensor Correction Method Based on Virtual CMOS with Distortion for the GaoFen6 WFV Camera[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 156: 51-62.
[23] TAO C V, HU Y. A Comprehensive Study of the Rational Function Model for Photogrammetric Processing[J]. Photogrammetric Engineering and Remote Sensing, 2001, 67(12): 1347-1358.
[24] 张力, 张继贤, 陈向阳, 等. 基于有理多项式模型RFM的稀少控制SPOT-5卫星影像区域网平差[J]. 测绘学报, 2009, 38(4): 24-32. ZHANG Li, ZHANG Jixian, CHEN Xiangyang, et al. Block-adjustment with SPOT-5 Imagery and Sparse GCPs Based on RFM[J]. Acta Geodaetica et Cartographica Sinica, 2009, 38(4): 24-32. (in Chinese)
[25] YANG B, WANG M, XU W, et al. Large-scale Block Adjustment without Use of Ground Control Points Based on the Compensation of Geometric Calibration for ZY-3 Images[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 134: 1-14.
[26] PI Y, YANG B, LI X, et al. Large-scale Planar Block Adjustment of GaoFen1 WFV Images Covering Most of Mainland China[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 57(3): 1368-1379.
[27] 李国元, 唐新明, 王华斌, 等. GLAS激光测高数据辅助的资源三号三线阵区域网平差研究[C]//第三届高分辨率对地观测学术年会分会论文集. 北京: 高分辨率对地观测系统重大专项管理办公室, 2014: 1-15. LI Guoyuan, TANG Xinming, WANG Huabin, et al. Research on the ZY-3 Block Adjustment Supported by the GLAS Laser Altimetry Data[C]//Proceedings of the 3rd Annual Conference of High Resolution Earth Observation. Beijing: Major Special Management Office of High Resolution Earth Observation System, 2014: 1-15. (in Chinese)
[28] 王晋, 张勇, 张祖勋, 等. ICESat 激光高程点辅助的天绘一号卫星影像立体区域网平差[J]. 摄影测量学与遥感, 2018, 47(3): 359-369. WANG Jin, ZHANG Yong, ZHANG Zuxun, et al. ICESat Laser Points Assisted Block Adjustment for Mapping Satellite-1 Stereo Imagery[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(3): 359-369. (in Chinese)
[29] TEO T A, CHEN L C, LIU C L, et al. DEM-aided Block Adjustment for Satellite Images with Weak Convergence Geometry[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 48(4): 1907-1918.
[30] CHEN X, CEN M, GUO H, et al. Chinese Satellite Photogrammetry without Ground Control Points Based on a Public DEM Using an Efficient and Robust DEM Matching Method[J]. International Journal of Remote Sensing, 2018, 39(3): 704-726.
A Review of High Resolution Optical Satellite Surveying and Mapping Technology
LI Deren WANG Mi
(State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University, Wuhan 430079, China)
From the successful launch of the first artificial satellite to today's increasingly abundant high-resolution remote sensing satellites, space photogrammetry based on satellite platforms has become a major means of surveying and revising large and medium scale topographic maps. The realization of high-resolution satellite stereo mapping cannot be separated from the continuous research of high-precision mapping processing technology. In this paper, three typical surveying and mapping methods (three line array, dual line array, and single line array/plane array) and their characteristics of high-resolution optical satellite are analyzed, and the key geometrical technologies involved in surveying and mapping processing are introduced. Finally, the future development of space photogrammetry under the service and application mode of intelligent remote sensing satellite is prospected based on the launch plan of China’s surveying and mapping satellites.
stereo mapping; mapping processing; intelligent service; high-resolution optical satellites
P237
A
1009-8518(2020)02-0001-11
10.3969/j.issn.1009-8518.2020.02.001
李德仁,男,1939年生,中国科学院院士、中国工程院院士,主要从事以遥感、全球定位系统和地理信息系统为代表的空间信息科学与技术的科研和教学工作。
王密,男,博士,教授。研究方向为高分辨率光学遥感卫星数据处理与应用。E-mail:wangmi@whu.edu.cn。
2020-02-19
国家自然科学资金委员会重大集成项目(91738302)
李德仁, 王密. 高分辨率光学卫星测绘技术综述[J]. 航天返回与遥感, 2020, 41(2): 1-11.
LI Deren, WANG Mi. A Review of High Resolution Optical Satellite Surveying and Mapping Technology[J]. Spacecraft Recovery & Remote Sensing, 2020, 41(2): 1-11. (in Chinese)
(编辑:庞冰)
