星载激光测高仪高精度波形数字化获取技术研究
2020-05-21黄庚华童鹏丁宇星蓝晓萍王海伟舒嵘
黄庚华 童鹏 丁宇星 蓝晓萍 王海伟 舒嵘
星载激光测高仪高精度波形数字化获取技术研究
黄庚华 童鹏 丁宇星 蓝晓萍 王海伟 舒嵘
(中国科学院上海技术物理研究所,中国科学院空间主动光电技术重点实验室,上海 200083)
星载激光测高仪通过测量激光发射脉冲与激光接收回波脉冲之间的时间间隔,与光速常量进行计算获得与激光落点之间的相对距离。“高分七号”卫星激光测高仪采用高速数字化回波获取技术,可以在地表反射率变化、倾斜地形、林木及城市建筑复杂回波等场景下工作,为高程控制提供精确的距离信息。实验室室内标定结果表明,在强度变化33dB条件下,回波测距均值最大变化为3.3cm,距离测量方差优于3cm(1)。
激光测高仪 全波形 高精度“高分七号”卫星
0 引言
目前机载激光雷达发展较为成熟,已经有多种系统投入商业运行。由于机载激光雷达受扫描视场角、飞行区域等因素的限制,很难实现对全球范围数据的获取。与机载激光雷达相比,星载激光测高仪采用卫星平台,运行轨道高、观测视野广,可以触及世界的各个角落,为境外地区三维控制点和数字高程模型(Digital Elevation Model,DEM)/数字地表模型(Digital Surface Model,DSM)的获取提供了新的途径,对于国防和科学研究都具有十分重大的意义。此外,星载激光测高仪还可以在植被垂直分布测量、海面高度测量、云层和气溶胶垂直分布测量等方面发挥重大作用。
2003年1月13日,美国在Vandenberg 空军基地成功发射地球激光测高试验卫星ICESAT。该卫星配备地球科学激光测高系统(Geoscience Laser Altimeter System,GLAS),沿轨道方向足印间隔170m,轨道方向跨度50km。全波形获取技术速率达到1GHz。作为全球首颗对地观测激光雷达卫星,ICESAT取得了很多开创性的成果:采用单波束激光获取了全球的高程分布曲线图;提供了统一基准高程数据集;具有目前世界最高的高程测量精度,经过严密的地面控制点筛选,高程精度优于0.1m、水平精度优于10m。
“高分七号”(GF-7)卫星激光测高仪是我国自行研制的首台面向业务化应用的星载测高系统,服务于1∶1万比例尺高程控制的任务。2019年11月3日,GF-7卫星在山西太原成功发射,标志着我国已初步构成高分辨率对地观测系统并形成体系能力。激光测高仪随后在轨开机,获取了森林、戈壁、山脉等丰富的激光回波信号及落点区域的可见光影像。
1 全波形测量技术
1.1 全波形测量原理
星载平台由于作用距离在500km量级,一般使用脉冲测距法获得较高的信噪比。其过程为:激光器对目标发射一窄脉宽激光脉冲,与此同时在光源处引出小部分光到探测器,经过光电转换后,输出的电信号作为起始脉冲信号,用来标定激光发射的起始时刻1。激光脉冲到达目标后,由于目标的漫反射作用,部分光会反射回来进入到接收光学系统,经过光电转换后,输出的电信号作为停止脉冲信号,标志激光回来的时刻2,因此目标距离可表述为:

式中=2.997 924 58×108m/s是真空中光的传播速率;1、2为激光发射的起始和回波接收时刻;为目标与测距系统的距离。
星载全波形激光高度计是近年来激光雷达技术发展史上的一项技术革新,它较之一般的星载激光高度计,具有能充分记录返回的所有激光信号,可构成完整的波形数据,用户可以根据自己的需求对波形数据进行分析和处理以获得更多的有用信息等优点。全波形激光雷达采用数字化方式,在记录若干次离散回波信号的同时,将激光的发射信号和回波信号均以很小的采样间隔进行采集并记录[1]。激光雷达记录的回波波形是对激光光斑内各点反射信号按时间先后顺序记录的,可以看作是回波强度信息在接收时间轴上的一个函数[2]。图1为回波数字化及波形分析原理示意[3]。
全波形激光雷达采用的是连续的回波波形记录方式,在具有传统激光雷达功能的同时,还记录了目标物的相关特征信息(如长度、宽度、强度等),为目标物空间结构、发射脉冲与目标物的作用机理以及后向散射特性的研究提供了进一步的提升空间。用户可以根据应用需求,对波形数据进行选择性的处理和分析,从而得到比传统激光雷达更加精确的点云坐标,以及更高品质、更丰富的地物特征信息。
1.2 激光测高仪全波形单元组成
GF-7卫星激光测高仪在垂轨方向±0.7°各安装2台激光器及相应的足印相机,每台激光器发射一波束,在激光发射瞬时获取激光足印落点区域的地面可见光影像及激光光斑影像,如图2所示。
激光测高仪的主要设计参数如表1所示。

图1 回波数字化及波形分析原理示意

图2 激光测高分系统测绘流程与方法示意
激光测高仪主体如图3所示,由1台主接收望远镜、2台二级扩束镜、4台±0.7°方向含冷备份激光器、2套发射光路调整机构、2台±0.7°方向足印相机、1台0°方向监视相机、2套足印相机调焦机构及4套主备光路切换机构、激光驱动组件,全波形组件等。全波形单元安装在激光测高分系统主体两侧,通过环路热管将各组件约130W热量带走,并保持激光器处于(20±1)℃的理想工作温度范围。
表1 激光测高仪基本设计参数

Tab.1 Basic design parameters of the laser altimeter
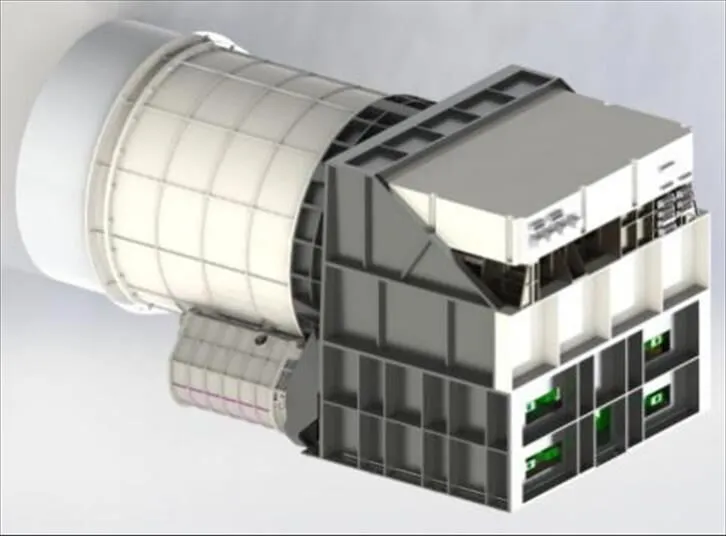
图3 激光测高仪主体
激光测高仪在激光发射光路、激光接收光路中设计了光纤取样通道。其取样光信号传递的整个流程如图4所示:
1)激光器发射的激光被取光组件接收到,并耦合到光纤中。
2)激光经过一系列的光纤网络后,一部分进入激光接收机的PIN光电二极管,用作激光发射的时标时刻。另外一部分激光经过1.5km长度的光纤延迟后,再进入望远镜主镜的激光接收光路,作为延迟起始信号。
3)数字化全波形电路对延迟起始信号、回波信号均进行采样,通过回波信号的波形与延迟起始波形的峰值时刻差,得到经固定光纤延迟后的激光飞行时间,有效消除PIN主波电路与回波采样电路的延迟差异,提高测距稳定性。
数字化全波形输出波形序列如图5所示,数字化全波形电路在接收到采集启动脉冲后,将会对激光脉冲信号进行采集,包括主波信号以及个回波信号。

图4 激光光纤取样通道
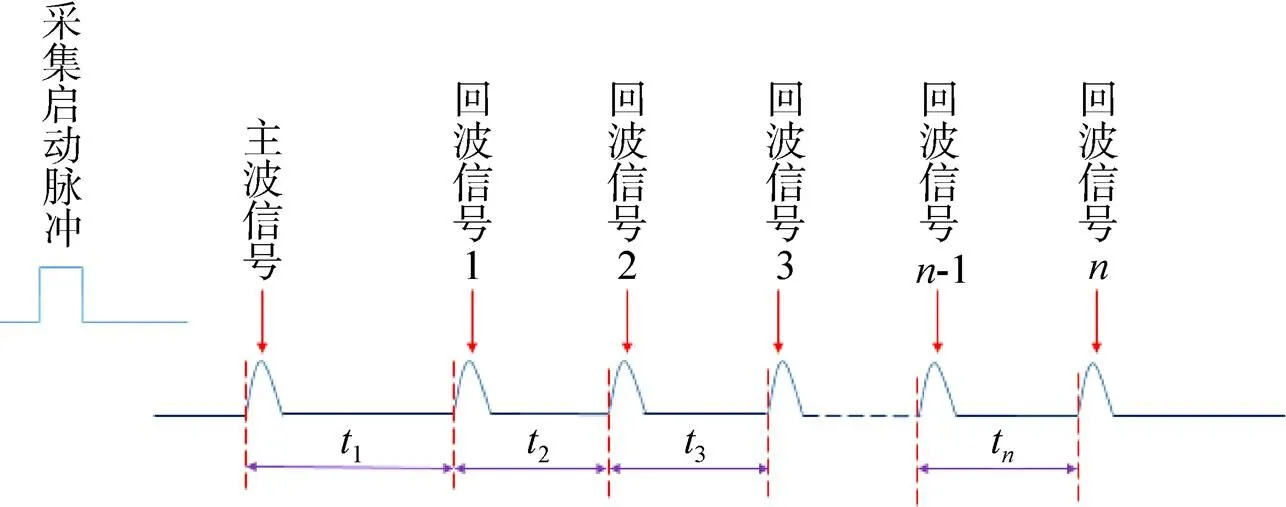
图5 回波通道采集示意图
1.3 全波形自适应采集方法
现有全波形测量方法由主波脉冲信号启动,一直采集至回波信号到达。对于500km轨道高度,如波形数字化频率为2Gsps(2G samples per second),量化位数10bit,单次激光发射周期内所需要的数据存储量为12.7Mbyte。而激光回波脉宽仅为5~40ns,单个脉冲的有效数据不到500采样点。如使用固定距离门方式,仅采集离地面10km距离内的回波信息,单次测量数据存储量为260.4kbyte,有效数据占比仍然很低。
自适应波形采集方法基于可变窗口及阈值实时判读策略,流程如下:
1)一旦检测到连续3个采样点大于等于设定阈值,表明波形数据有效,需采集和存储波形数据。
2)回波数据采集以固定的窗口点数为基本窗口,前1个窗口检测到波形数据后,继续对该窗口的最后32个采样点、以及下一个窗口的数据进行检查。如第2个窗口也检测到波形数据,将2个窗口的波形数据合并成1个窗口。以此类推,直至设定的窗口总量填满。
3)如后续窗口无波形,则按照波前数据和采样总点数对波形数据进行采集、存储。
4)各窗口内对波形的波前数、采样总点数可通过参数设置指令进行设置。
采用该自适应方法后,单通道数据存储和传输量≤4 000点,较10km距离门,该采集方法数据存储量仅为1.5%。
1.4 全波形分解方法
波形分解是目前激光雷达较为常用的波形数据处理方法[3],由于大多数激光雷达系统发射的脉冲波形都是高斯分布,所以大部分的研究都假设地物的回波波形也呈现高斯分布[4],回波波形可以看作是若干个高斯函数的叠加,高斯模型能很好的模拟波形数据,用户可以根据需求,对波形数据进行分解以得到想要的地物特征(如高斯函数的振幅、波形宽度、峰值位置等),Wagner等[5]提出超过98%的RIEGL系统的观测波形可以与高斯函数叠加后的波形相符,因此波形分解在波形数据处理中占据了重要地位。波形分解的一般步骤包括降噪和平滑、确定拟合曲线的数学解析函数、寻找波形参数的初始值、估计函数参数值并优化和修正拟合结果。对于15m量级的激光发射足印,如内部有多个不同高度的目标,由于返回时间的差异将产生不同的回波信号,这些回波可以看作是一系列高斯函数的叠加[6]。
2 试验与测试结果
2.1 地面多回波试验结果
图6所示为试验现场模拟的地面多目标的正视图和侧视图,在直径为1.8m的激光足印内放置了4个面积均为0.3m×0.3m的正方体地物目标,各物块距足印中心的位置相等,物块间距均为1m,在激光光束方向相对于地表的高度分别为1m,2m,3m,4m,一个面积为2m×2m的靶板用于模拟地表,激光足印完全包含于靶板中。

图6 试验现场目标物的正视图(左图)和侧视图(右图)
试验过程所采集的回波波形数据经过波形分解算法处理,如图7所示。图中曲线所示为单个激光回波脉冲的全波形分解结果,黑色实线为波形数据处理前的重叠回波;红色虚线、蓝色虚线、绿色虚线、浅蓝色虚线、粉色虚线均为经过波形分解算法处理得到的子回波。根据这些子回波的参数值可以计算出相邻两个回波波形之间的相对距离值,如表2所示。
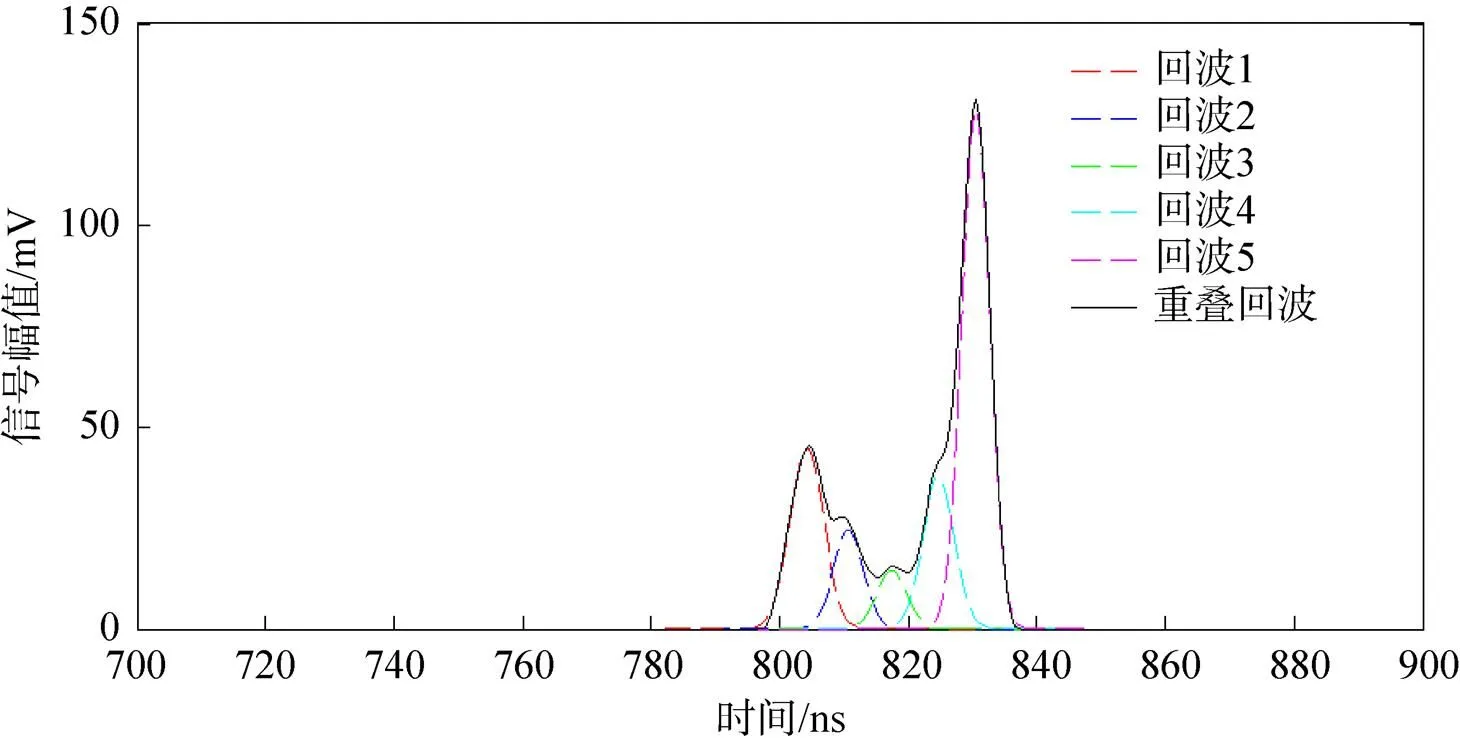
图7 波形分解结果
表2 相邻地物目标的实际间距与分解后所得各子回波间距比较

Tab.2 Comparison of the actual distance between adjacent ground objects and the distance between each sub-echo after decomposition 单位:m
对于系统采集的回波信号,波形分解算法的分解精度可以控制在0.03m范围内。
2.2 全波形测距精度室内测试结果
采用10km、800m固定长度光纤对激光测高仪两个方向测距通道的精度进行了室内测试,波束1及波束2的测距平均值及测距方差如表3所示。
选取波束2进行回波大动态范围情况下精度测试,在固定光纤条件下调整回波信号幅度。回波信号最大峰值900mV,最小20mV。对应的测距平均值如表4所示,波形反演距离的最大距离行走误差为0.033m。
表3 测距通道精度测试
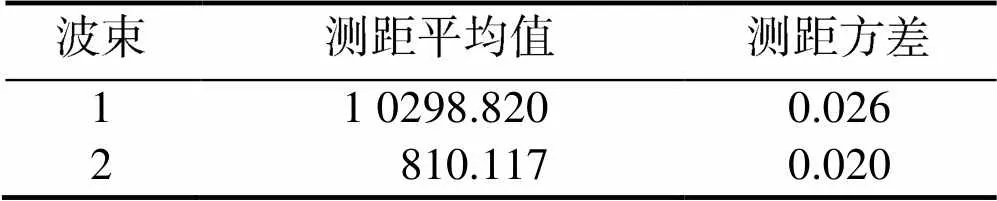
Tab.3 Comparison of measurement accuracy of each ranging channel 单位:m
表4 大动态范围下测距行走误差
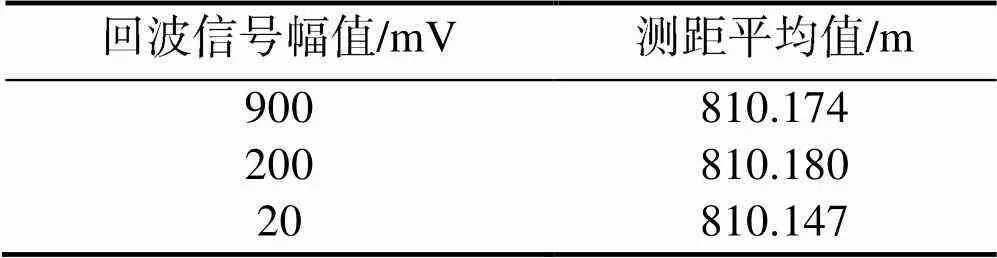
Tab.4 Range-finding travel errors in large dynamic range
2.3 在轨数据采集结果
以GF-7卫星第33轨为例,波束1、波束2回波峰值分布如图8所示,均无饱和现象引起全波形算法精度下降的情况出现。无回波区域经足印影像比对为云层覆盖区域。排除云层区域后,回波探测概率接近100%。
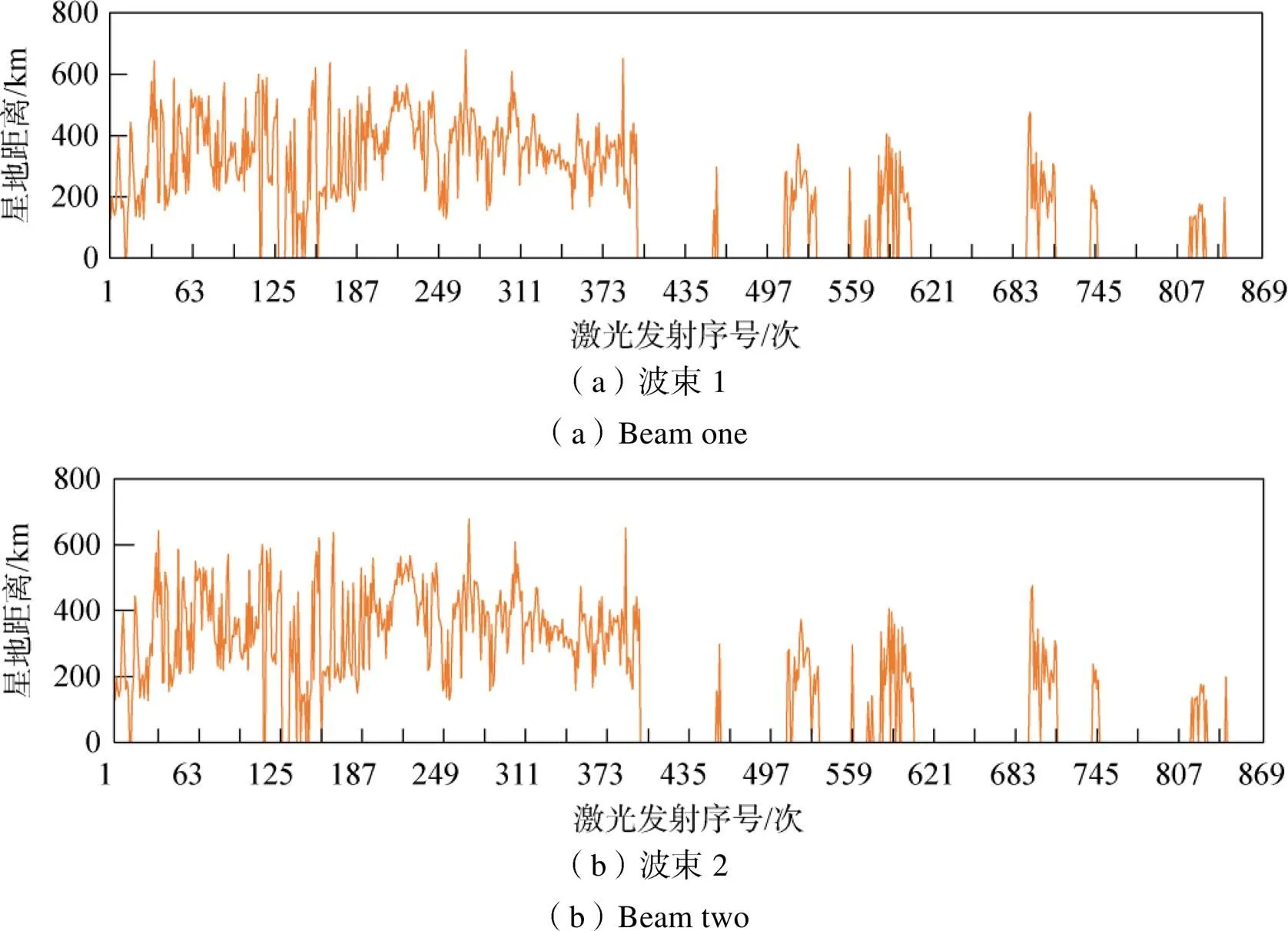
图8 单轨峰值
根据实验室标定结果,以红圈方式在激光测高仪足印相机影像上标记激光实际落点,图9为对林地、建筑、平原所采集到的回波波形。波形信息丰富,回波通道信噪比优于20dB。

图9 激光足印影像(上)与全波形(下)
3 结束语
GF-7卫星激光测高仪采用了全新的全波形数字化回波采集技术,与激光足印相机影像共同实现激光落点位置、激光回波信息的采集,为1∶1万比例尺测绘高程控制提供了有效的技术手段。至2020年3月,测量数据超过300轨,激光测点5万余个。除完成在轨参数设置和状态调整测试外,还配合用户开展了南极中山站区域和南极大陆冰盖的激光测绘工作,后续将开展星地联合标定工作,进一步提高后期数据处理精度。在轨预计可获取至少2亿个激光高程数据,将为构建我国境内无控区域乃至全球高精度立体测绘信息网发挥关键作用。
[1] 周梦维, 柳钦火, 刘强, 等. 基于机载小光斑全波形LIDAR的作物高度反演[J]. 农业工程学报, 2010, 26(8): 183-188. ZHOU Mengwei, LIU Qinhuo, LIU Qiang, et al. Inversion for Crop Height by Small-footprint-waveform Airborne LIDAR[J]. Transactions of CSAE, 2010, 26(8): 183-188. (in Chinese)
[2] 周静平, 张爱武, 王书民. 机载小光斑全波形LiDAR数据处理及应用[J]. 测绘通报, 2013(1): 10-13. ZHOU Jinping, ZHANG Aiwu, WANG Shuming. Processing and Application of Small-footpring Full-waveform Airborne LiDAR Data[J]. Bulletin of Surveying and Mapping, 2013(1): 10-13. (in Chinese)
[3] ULLRICH A, REICHERT R. High Resolution Laser Scanner with Waveform Digitization for Subsequent Full Waveform Analysis[J]. SPIE, 2005, 5791: 82-88.
[4] ZWALLY H, SCHUTZ B, ABDALATI W, et al. ICESat’s Laser Measurements of Polar Ice, Atmosphere, Ocean, and Land[J]. Journal of Geodynamics, 2002, 34(3): 405-445.
[5] WAGNER W, ULLRICH A, DUCIC V, et al. Gaussian Decomposition and Calibration of a Novel Small-footprint Full-waveform Digitising Airborne Laser Scanner[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2006, 60(2): 100-112.
[6] 周晓明. 机载激光雷达点云数据滤波算法的研究与应用[D]. 郑州: 解放军信息工程大学, 2011. ZHOU Xiaoming. Research and Application of Filtering Algorithm for Airborne Lidar Point Cloud Data[D]. Zhengzhou: PLA Information Engineering University, 2011. (in Chinese)
[7] 王建荣, 王任享, 胡莘. 卫星影像定位精度评估探讨[J]. 航天返回与遥感, 2017, 38(1): 1-5. WANG Jianrong, WANG Renxiang, HU Xin. Discussion on Evalution of Satellite Imagery Location Accuracy[J]. Spacecraft Recovery & Remote Sensing, 2017, 38(1): 1-5. (in Chinese)
[8] 王任享. 三线阵CCD影像卫星摄影测量原理[M]. 北京: 测绘出版社, 2006. WANG Renxiang. Satellite Photogrammetric Principle for Three-line Array CCD Imagery[M]. Beijing: Publishing House of Surveying and Mapping, 2006. (in Chinese)
[9] 徐文, 龙小祥, 李庆鹏. “高分二号”卫星影像辐射质量评价[J]. 航天返回与遥感, 2015, 36(4): 1-9. XU Wen, LONG Xiaoxiang, LI Qingpeng. Radiometric Image Quality Assessment of GF-2 Satellite PMS Camera[J]. Spacecraft Recovery & Remote Sensing, 2015, 36(4): 1-9. (in Chinese)
[10] 金涛, 李贞, 李婷, 等. 提高光学遥感卫星图像几何精度总体设计分析[J]. 宇航学报, 2013, 34(8): 1159-1165. JIN Tao, LI Zhen, LI Ting, et al. System Design and Analysis for Improving Geometric Accuracy of High-resolution Optical Remote Sensing Satellite Image[J]. Journal of Astronautics, 2013, 34(8): 1159-1165. (in Chinese)
[11] 张剑清, 潘励, 王树根. 摄影测量学[M]. 武汉: 武汉大学出版社, 2009. ZHANG Jianqing, PAN Li, WANG Shugen. Photogrammetry[M]. Wuhan: Wuhan University Press, 2009. (in Chinese)
High Accuracy Full Waveform Digitizing Technology of Spaceborne Laser Altimeter
HUANG Genghua TONGPeng DING Yuxing LAN Xiaoping WANG Haiwei SHU Rong
(Laboratory of Space Active Electro-optical Technology, Shanghai Institute of Technical Physics, Chinese Academy of Sciences, Shanghai 200083, China)
Using the time interval between the laser emitted pulse and the echo pulse measured with the spaceborne laser altimeter, the relative distance between the laser footprint and the satellite can be calculated with light velocity. The GF-7 satellite laser altimeter uses high-speed digital echo acquisition technology, which can work in scenarios such as surface changing reflectance, inclined terrain, complex echoes of forest and urban buildings, providing accurate distance information for elevation control. The laboratory calibration results show that the variance of the measured distance is better than 3cm (1), and the maximum change in the average value is 3.3cm in the intensity change of 33dB.
laser altimeter; full waveform; high accuracy; GF-7 satellite
TN249
A
1009-8518(2020)02-0039-08
10.3969/j.issn.1009-8518.2020.02.005
黄庚华,男,1980年生,2007年获中国科学院博士学位,研究员。研究方向为空间主动光电技术。E-mail:genghuah@mail.sitp.ac.cn。
舒嵘,男,1971年生,研究员。研究方向为空间光电及量子信息处理。E-mail:shurong@mail.sitp.ac.cn。
2020-03-15
国家重大科技专项工程
黄庚华, 童鹏, 丁宇星, 等. 星载激光测高仪高精度波形数字化获取技术研究[J]. 航天返回与遥感, 2020, 41(2): 39-46.
HUANG Genghua, TONG Peng, DING Yuxing, et al. High Accuracy Full Waveform Digitizing Technology of Spaceborne Laser Altimeter[J]. Spacecraft Recovery & Remote Sensing, 2020, 41(2): 39-46. (in Chinese)
(编辑:陈艳霞)
