独立轮对轻轨车通过曲线研究
2020-05-20文永翔周文祥张晓阳
文永翔, 周文祥, 陈 阳, 张晓阳
(西南交通大学 牵引动力国家重点实验室, 成都 610031)
轻轨车辆作为城市轨道交通中的重要角色,在城市运行中面临的最大问题就是通过小半径曲线时轮缘磨耗严重,为此,国内外开发了多种多样的轻轨车辆结构型式和转向架结构[1],使其顺利通过曲线。100%低地板轻轨车作为新一代车型,更具人性化,大部分100%低地板轻轨车采用了独立轮对转向架。文献[2-3]分析了独立轮对的导向机理,研究指出完全独立旋转车轮与传统刚性轮对相比,左右车轮由于相对独立旋转,失去了传统轮对具有的直线对中复位和曲线导向能力。而通过下置车轴进行横向耦合的独立轮对,具有直线对中复位能力和一定的曲线通过能力[4]。
为了提高独立轮对的曲线通过能力,国内外研究人员提出了采用主动导向控制的方法。英国的Wickens[5]首先提出了一种基于检测轮对横移量控制独立轮对冲角的方法,但是轮对横移量的检测十分困难。因此任利惠等[6]在其基础上以左右轮对转速差为检测量,分析了轮对姿态和左右轮转矩的两种控制模型。文中在基于左右车轮转速的基础上,给出一种将主动差速器与横向耦合相结合的独立轮对结构型式,并对其进行主动控制进行研究。
1 轻轨车辆的曲线通过
近三十年来,西门子、庞巴迪、阿尔斯通等公司研发生产的轻轨车辆型号推陈出新,多种多样,主流的车辆结构有常规型式、单车型式和浮车型式3种。从拓扑结构的角度分析不同车辆结构型式通过曲线时车体的姿态变化。将车辆的横向、垂向尺寸进行压缩,车体简化为一条线段;线路则由直线和曲线组成;转向架与车体间的连接关系简化为固结,其相对转动关系单独分析;相邻车体模块之间连接关系简化为铰接。
常规式如LF2000系列轻轨车辆、不莱梅GT8N-1车辆,拓扑分析如图1所示。当常规式车体在进入曲线但未完全进入曲线时,车体轴线与线路曲线切线具有一定的角度,这种角度会在轮轨冲角、转向架与车体之间相互转动等方面体现出来。为了缓和这种车辆型式带来对轮轨冲角的影响,并满足车体良好的曲线通过性能,在设计转向架的一系或二系悬挂时应保证轮对相对车体具有一定的回转角度。
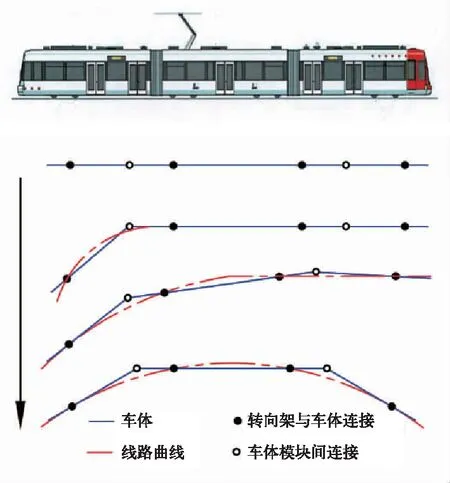
图1 常规型式(GT8N-1)曲线通过
每一节车辆模块下面仅布置一台转向架的车辆结构型式称为单车型式,结构拓扑分析如图2。在通过曲线时会呈现“Z”字型运动,通常这种情况下,车体铰接处会超出限界。所以采用单车型式的GT6N在欧洲城市运行时都有特殊的限界规定。
为了解决GT6N曲线通过超限界的问题,Duewag生产了采用轮毂电机转向架的R系列单车型轻轨车,与GT6N不同的是,R3.3轻轨车车体间的3处铰接不再完全相同,在前后两端的铰接方式为单过道,中间铰接处变成了双过道。通过拓扑结构分析可以明显发现这样做的好处,在R3.3通过曲线时,原来2、3车之间发生的反向扭转通过中间的双过道变形消除,从而不会影响第3车模块的位置,如图3。此外,通过对车体前端采用“削尖”的方法,同样能够解决单车式车体通过曲线时超出限界的问题。
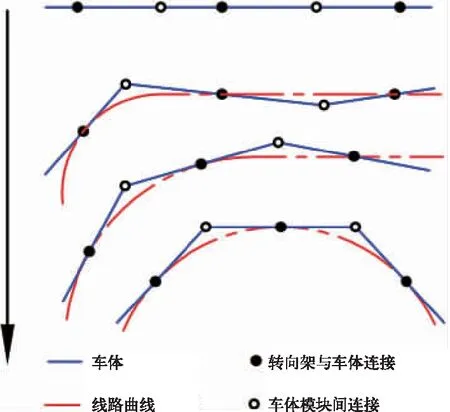
图2 单车式曲线通过
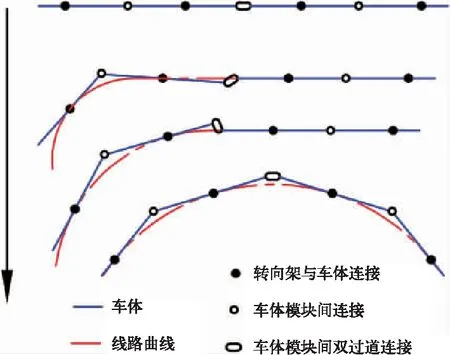
图3 带双过道的单车式曲线通过
浮车型式是目前绝大多数轻轨车采用的方式,其特点是车辆中间某一节或几节的车体模块下方没有转向架支撑,而是 “挂”在相邻的前后车体上,例如庞巴迪的Flexity Outlook系列车型、Flexity2车型。由于它的悬浮(轿子)模块没有转向架作为承重,它的质量将通过“挂靠”分担到相邻两个车体上。在实际运行中,车辆通过曲线时,车体间相互的点头、摇头和侧滚使得铰接处的受力更加恶化,所以浮车型式车体铰接处的设计尤为关键。
如图4所示,浮车型式无论在车体处于什么位置,配置有转向架的车体模块轴线始终能保持在线路曲线的切线方向。通过分析不难发现,与单车型式相比,浮车型式除去了中间车体模块下的转向架,使悬浮车体模块可随前后车体模块的姿态变化进行自我调整,转向更灵活,曲线通过性能更好。
在国内外研发生产的轻轨车辆中,非动力转向架基本上是独立轮对转向架,而动力转向架既有传统轮对,也有独立轮对。如图5所示,对不同组合的低地板效果进行研究显示,采用传统轮对动力转向架基本不能满足车辆的100%低地板,独立轮对动力转向架是100%低地板轻轨车辆未来的发展趋势。轻轨车辆的实际研发情况统计见表1,同样支持这一结论。

图4 浮车型式曲线通过
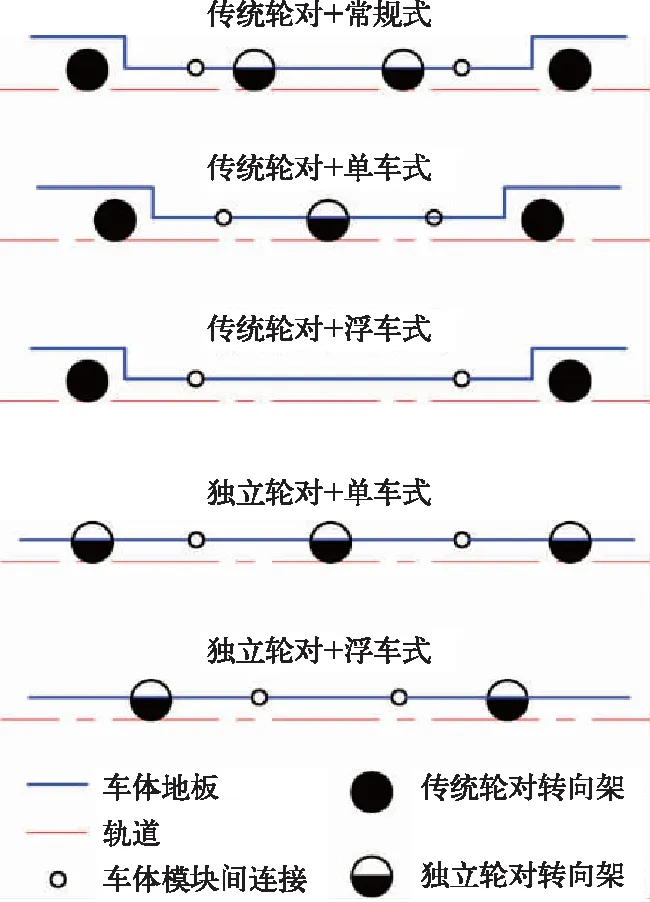
图5 不同组合的车辆低地板效果

表1 轻轨车辆车型统计数据
2 独立轮对结构
独立轮对转向架拟采用横向耦合的独立轮对,将轮对公共轴下置形成U形结构,并通过齿轮传动耦合左右车轮的转速,这样可以使独立轮对恢复传统轮对的直线对中能力。
文中给出了一种可主动控制的独立轮对结构,其原理如图6,行星差速器包括太阳轮、行星轮、行星架和内齿圈,其中一个作为控制构件,其余两个作为输入或输出。动力从牵引电机输入到左车轮,并通过下置轴桥输入到行星差速器中的太阳轮,右车轮与行星架固结,通过控制内齿圈上的涡轮蜗杆,改变太阳轮与行星架的速比或相位关系,最终达到左右独立轮差转控制的目的。

图6 主动控制独立轮对原理图
首先分析独立轮对的行星传动部分,由行星传动机构的约束条件[7],给出行星轮系中的配齿总公式为:
za:zg:zb:q=
(1)
式中二三四项分别对应同心条件、传动比条件和装配条件,而各项齿数都应为正整数。而期望达到控制系统缺省状态为:控制构件输入为零时,左右独立轮对的转速相同。则下置轴桥的两侧传动轮系应满足:
(2)
又因为中心距的限制,左车轴和右车轴距下置轴桥的距离应相等,轮系中的齿轮模数取相同值,则有:
z3+z4=z5+z6=C
(3)
3 独立轮对主动导向
3.1 主动差速的控制目标
文献[8]分析得出,对基于左右车轮转速差的控制期望方程为:
(4)

(5)
代入典型值并将小值忽略,当轮对径向通过曲线时,忽略横移与冲角,得到左右车轮转速差为:
(6)
可以看出,左右轮对转速差控制目标由车辆运行速度和轮对所处位置的轨道线路曲率决定。
3.2 主动导向机理

(7)
在独立轮对在圆曲线上达到稳态时,忽略轮对惯性力的影响,将控制目标式(6)代入式(7)中有:
(8)
由式(8)可以分析出,采用左右轮转速差控制时,所控制的独立轮对达到的控制目标(轮对横移量)不仅与反馈量有关,还与轮对的一系悬挂相关,只有当一系悬挂的摇头刚度为零时,控制才能达到理想的目标,即独立轮对通过曲线时横移量为零。产生这种控制效果的原因,是因为采用转速控制的左右轮对转速,使独立轮对能形成有利的冲角通过曲线,但独立轮对的纵向蠕滑力的大小受蠕滑率的限制,蠕滑率为左右车轮的转速差与车辆速度的比值,因此当控制目标(左右车轮转速差)确定后,左右车轮的蠕滑力也就确定了,而只有当左右车轮纵向蠕滑力产生的回转蠕滑力矩和轮对的一系悬挂摇头刚度产生的摇头力矩相平衡时,系统才能达到平衡状态。
4 仿真分析
4.1 建立仿真模型
利用SIMPACK动力学软件建立了3种转向架模型,对比分析不同类型轻轨车的动力学性能。第1种是传统刚性轮对转向架;第2种是完全独立轮对转向架,左右车轮完全解耦;第3种是主动控制独立轮对转向架,采用最简单的比例控制。
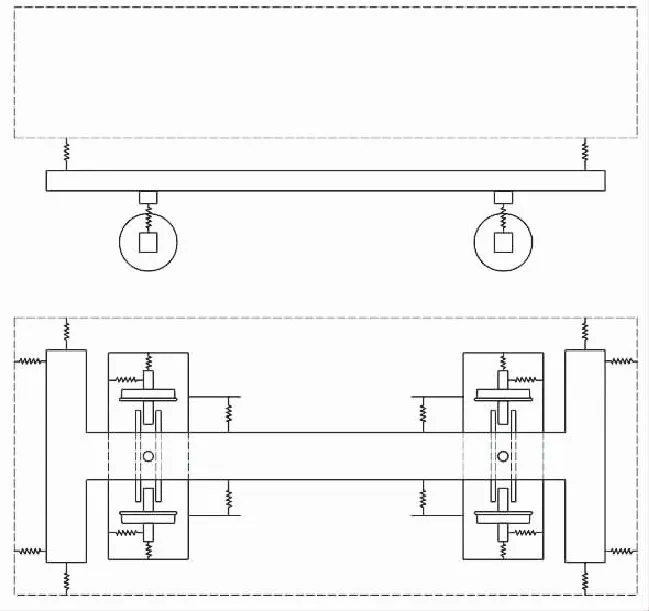
图7 动力学模型拓扑图
整个车辆系统动力学仿真模型如图7所示,值得注意的是,这个模型与传统转向架建模有所不同。在建模过程中,转向架是由前后两个单轴转向架经过一个横梁连接,单轴转向架的构架与横梁之间保留了构架相对横梁的绕z轴的转动自由度。增加了横向的弹簧阻尼,用于单轴转向架构架与横梁的横向约束关系,提高单轴转向架的摇头稳定性,但同时又满足车辆在通过曲线时,轮对相对横梁的回转运动,缓和轮对通过曲线时的冲击与磨耗。
4.2 直线对中能力
在通过直线时,设定车辆运行速度为20 m/s,所有轮对的初始横移量为3 mm,对比分析3种转向架的直线复位能力。
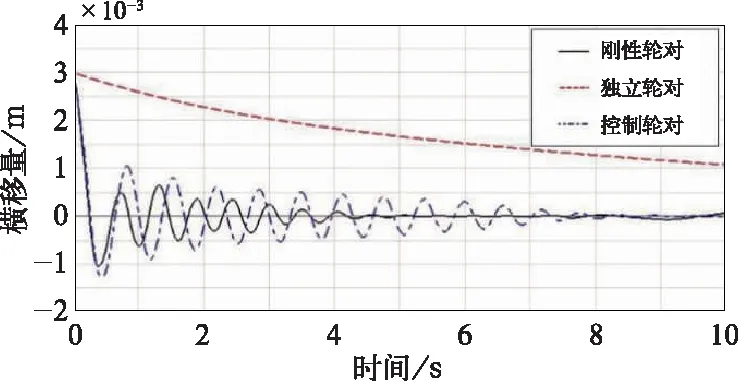
图8 轮对通过直线横移量对比
由图8可看出,刚性轮对向轨道右侧偏移后能够回复到轨道的中心位置,这是因为前后轮对偏移后,受到重力复原力,左右车轮纵向蠕滑力产生恢复力矩,使轮对向轨道中心复位,从而产生一个正摇头角,当轮对回到轨道中心位置时,前后轮对的摇头角达到最大值,因此轮对继续向另一侧偏移,轮对的这种往复运动被称为蛇行运动,而随着继续运行,转向架中悬挂阻尼使得轮对最终达到稳态,保持在轨道的中心位置。完全独立轮对发生横向偏移后,由于没有纵向蠕滑产生的回转力矩,只能依靠重力复原力缓慢的向轨道中心复原,因此相对于刚性轮对,完全独立轮对的直线复位能力较差。采用主动控制的独立轮对和刚性轮对一样,在直线上具有自动的对中能力。
4.3 曲线通过能力
在曲线模拟仿真中,仿真工况取车辆的运行速度为10 m/s,通过半径为30 m的半径曲线,通过对比分析3种转向架的曲线通过情况。

图9 轮对通过曲线横移量对比
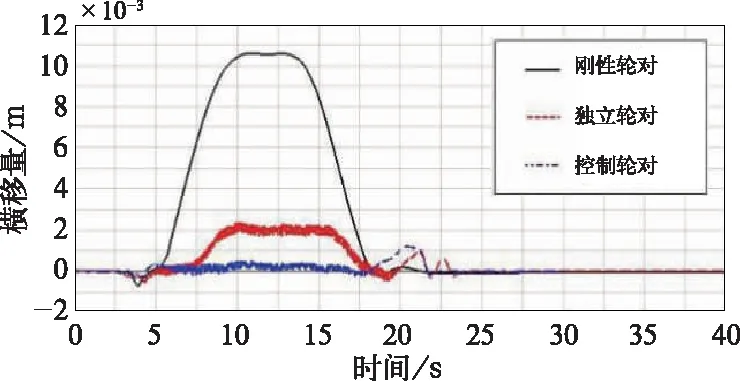
图10 轮对通过曲线冲角对比
图10给出了3种转向架通过曲线时的轮轨横移量和冲角的对比。可以看出:刚性轮对和完全独立轮对转向架在通过小半径曲线时,轮对的横移量较大,轮轨接触点已接近轮缘的脱轨点,但是独立轮对的冲角相对比刚性轮对小,这也说明了独立轮对在曲线通过上的优势。采用主动控制的独立轮对在通过曲线时,横移量和冲角都很小,这说明采用主动控制独立轮对的方法可以减少轮轨磨耗,减轻轮轨冲击,一定程度上提高了独立轮对的曲线通过性能。
5 结束语
在对轻轨车辆通过曲线的研究中,得到了以下启示:压缩轻轨车辆的横向、垂向尺寸,对车辆结构型式进行拓扑分析可以看出,浮车型式和独立轮对转向架是未来100%低地板轻轨车的发展趋势。提出的一种横向耦合独立轮对结构在参数设计上能够满足基于左右轮差速的控制需要。对主动控制目标和导向机理的研究表明,在通过曲线时表现和直线上一样的性能,轮对横移和冲角与转向架一系摇头刚度相关,最后通过动力学仿真也证明了这一点。与刚性轮对和完全独立轮对相比,主动差速控制的独立轮对具有磨耗小、噪声低的优点,曲线通过性能更好。
