基于MOPSO算法的斜拉桥索力优化分析
2020-05-19张玉平刘雪松李传习
张玉平 刘雪松 李传习


摘 要: 針对斜拉桥设计和监控计算中合理成桥状态和施工状态索力的确定问题,提出了一种基于MOPSO算法的斜拉桥索力优化方法。该方法在PSO算法的基础上通过增加外部储备集和优化更新策略来适应多目标、多约束的索力优化,较单目标优化方法仅有单一解的局限性,MOPSO算法考虑因素更全面,得到的Pareto最优解集可供决策者根据经验进一步筛选。采用Python编程语言,联合有限元软件编写基于该方法的优化程序,选取主塔、主梁的弯曲应变能之和,主塔成桥后在恒载作用下的纵桥向位移平方和作为目标函数,以施工过程及成桥后结构处于安全状态和索力总体分布均匀作为约束条件。工程算例优化结果表明,该方法能够快速搜寻到Pareto最优解集,并从中筛选出最优解,其结构应力处于安全范围,主塔线形合理,索力总体分布均匀。该方法可应用于斜拉桥成桥和施工阶段索力的确定及梁拱组合体系桥梁吊杆索力的确定。
关键词: 斜拉桥;索力优化;粒子群优化算法;多目标优化;有限元
中图分类号:U448.27 文献标志码:A 文章编号:2096-6717(2020)02-0107-08
Optimization of cable tension of cable-stayed bridges based on multi-objective particle swarm optimization algorithm
Zhang Yuping, Liu Xuesong, Li Chuanxi
(School of Civil Engineering, Changsha University of Science & Technology, Changsha 410114, P.R.China)
Abstract: To solve the problem of determining reasonable completion state and construction state in cable-stayed bridge design and monitoring calculation, a cable force optimization method based on MOPSO algorithm is proposed.This method adapts to multi-objective and multi-constraint cable force optimization by adding external reserve set and optimizing update strategy based on PSO algorithm.Compared with the single objective optimization method which has the limitation of single solution, MOPSO algorithm considers more comprehensive factors.The Pareto optimal solution set obtained by MOPSO algorithm can be further screened by decision makers based on experience.Python programming language and finite element software are used to compile the optimization program based on this method.The sum of the bending strain energy of the main tower and the main beam, and the sum of squares of longitudinal displacement under dead load is taken as the objective function after the completion of the bridge.The constraints are that the structure is in a safe state during the construction process and after the completion of the bridge and the overall distribution of cable forces is uniform.The optimization results of engineering examples show that the proposed method can quickly find the Pareto optimal solution set and select the optimal solution.The stress of the structure is in the safe range, the main tower is reasonable in alignment, and the overall distribution of cable forces is uniform.The method can be applied to determine the cable force in completion and construction of cable-stayed bridge and the suspender force of girder and arch combination bridge.
Keywords: cable-stayed bridge; optimization of cable tensions; particle swarm optimization algorithm; multi-objective optimization; finite element
现代斜拉桥多为密索体系,属于高次超静定结构,可以通过人为调整斜拉索各次张拉控制力,在一定范围内调整主梁、主塔等结构的变形和受力状态,因此,斜拉桥的设计自由度较大。如何通过优化索力来确定合理成桥状态与合理施工状态是斜拉桥设计和监控计算中需要解决的一个关键问题。
关于斜拉桥索力优化方法,许多学者已有大量的研究,多种不同方法各有其优点、不足和适用范围[1-5]。按照优化目标数量可分为单目标优化方法和多目标优化方法两大类。传统的零位移法、弯曲能量最小法、用索量最小法等可归为单目标优化方法,而影响矩阵法、遗传算法(genetic algorithms, GA)、粒子群算法(particle swarm optimization, PSO)等可用于多目标问题优化。相对前者,多目标优化方法能够更全面地考虑斜拉桥的受力状态和线形等指标,避免单目标优化方法的单一性。多目标优化方法中,影响矩阵法克服了单一目标函数优化的缺点,可以用较小的计算量得到较为理想的结果,然而,影响矩阵法只是表达了结构力学体系的一种受力规律,它本身不会自行取得最优解答[5]。而遗传算法、粒子群算法等智能优化算法则在这方面具有一定的优势。
遗传算法和粒子群算法对目标函数没有可导性、连续性等要求,算法概念简明,收敛速度快,鲁棒性好,并且粒子群算法相对遗传算法,不需要复杂的交叉、变异等操作,算法实现简单,在许多领域有广泛的应用[6]。在斜拉桥索力优化问题方面,也有一些学者运用该类方法进行了探索。刘益铭等[7]、朱敏等[8]、吴霄等[9]运用遗传算法,以主梁、主塔的最小弯曲能量为目标函数对斜拉桥索力进行优化;李鸿波等[10]运用量子粒子群算法,以矮塔斜拉桥恒载作用下的结构应变能为目标函数对斜拉桥索力进行优化。陈志军等[11]、姜增国等[12]和Hassan等[13]分别运用粒子群算法和遗传算法,以主梁线形和主塔线形或塔梁应变能为目标,通过对两个目标函数加权求和处理,实现多目标优化,其各分项系数比较敏感且需要一定的经验确定。以上文献研究内容集中于单目标优化或者将多目标转换为单目标优化,都存在一次仅能得到一个数值解的问题,而决策者更希望能够根据实际需要,在多个可行解中筛选得到最优解;并且将多目标转换为单目标处理忽略了各目标函数之间相互冲突的关系,不能算作真正的多目标优化。笔者将基于单目标粒子群优化算法的多目标粒子群优化(multi-objective particle swarm optimization, MOPSO)算法[14]应用于斜拉桥索力优化,建立的优化模型考虑多目标函数多约束条件,能搜寻出Pareto最优解集并从中进一步筛选得到最优解,实现斜拉桥索力的自动调优,确定合理成桥状态及合理施工状态,并通过一座非对称混合梁独塔斜拉桥验证了该方法的可行性。
1 MOPSO算法原理
粒子群算法(PSO)由美国心理学家Kennedy和电气工程师Eberhart在1995年共同提出,其思想来源于鸟类觅食等复杂群体行为。该优化算法概念简明,对目标函数要求低,易于编程实现[15]。
PSO算法可描述为:在D维搜索空间内有n个粒子,每个粒子可以看作是问题的一个解,将第i个粒子的位置用向量 x i=[xi1,xi2,…,xid]表示,飞行速度用向量 v i=[vi1,vi2,…,vid]表示,由所確定的目标函数输出该粒子的适应度值,通过迭代优化过程中适应度值的相互比较,每个粒子能够知道自己目前最好的位置 p best 1=[ p best i1, p best i2,…, p best id]以及群体搜索到的最好位置 g best =[ g best 1, g best 2,…, g best d],各粒子根据自身经验和种群内其他粒子的经验决定下一次移动的速度和位置,其速度和位置的更新公式为[15]
vkid=wvk-1id+c1r1( p best k-1id-xk-1id)+c2r2( g best k-1d-xk-1id) (1)
xkid=xk-1id+vk-1id (2)
vdmin≤vkid≤vdmax
xdmin≤xkid≤xdmax (3)
式中:vkid为第k次迭代粒子i飞行速度矢量的第d维分量,vdmin和vdmax为其限值;
xkid为第k次迭代粒子i位置矢量的第d维分量,
vdmin和vdmax为其限值;
pbestk-1id为第k-1次迭代粒子i经历最好位置矢量的第d维分量;
gbestk-1d为第k-1次迭代种群所经历过最好位置矢量的第d维分量;w为惯性权重,非负数,调节对解空间的搜索范围;c1和c2为加速度常数,调节其最大步长,取值范围为[0,2];r1和r2为两个介于(0,1)的随机数,增加搜索随机性。
MOPSO算法是在PSO算法的基础上扩展而来,原生支持多目标优化问题求解的算法。它具备PSO算法概念简明、易收敛和易编程实现的特点,而且对问题的连续性和可导性没有要求,适用范围广,该算法被认为是求解多目标优化问题最具潜力的方法之一[16]。MOPSO算法相较PSO算法通过增加外部储备集保存算法迭代过程中出现的非劣解,采取适当的更新策略更新每一次迭代中的pbest(个体引导者)、gbest(全局引导者)和外部储备集来解决多目标问题[17-18],其优化结果为一组最优解集,而非单一解,算法工作流程如图1所示[6]。
2 索力优化模型
2.1 设计变量
现代斜拉桥多为密索体系,其索力可调的特点使得斜拉桥设计的自由度较大,对于已确定的斜拉桥结构体系,需找到一组索力使得结构达到最优的受力状态和线形[19],因此,将索力作为调整的设计变量较合理,其向量形式为
X= [T1,T2,…,Tn]T (4)
式中:Ti为第i根斜拉索初始索力值;n为设计变量数,对于完全对称的斜拉桥,设计变量可取斜拉索数量的一半,对于非对称斜拉桥,设计变量取全部斜拉索数量。
2.2 目标函数及约束条件
斜拉桥索力确定需要遵循以下原则:
1)结构安全性原则。结构安全性原则包含斜拉桥施工过程的安全性和成桥状态下的安全性两部分,各构件在各工况下的应力必须满足规范要求且有一定的安全储备。
2)“梁平塔直”原则。“梁平塔直”为斜拉桥成桥的线形目标,主梁的成桥线形一般可以通过在施工过程中设置合理的预抬量调整,但也不宜出现过大的波动;而主塔线形一般无法通过设置预偏调整,通常在施工过程中以张拉索力进行控制,使其在成桥后达到“塔直”的目标。
3)索力总体分布均匀原则。斜拉索索力分布一般由主塔向两端(短索向长索方向)呈递增趋势,允许个别斜拉索索力小幅度跳跃,如主塔两侧第一对斜拉索索力和尾索索力。
综上,分别选取主塔、主梁的弯曲应变能之和,主塔恒载作用下,纵桥向位移平方和作为目标函数。以主梁、主塔的应力满足规范允许值,斜拉索索力总体分布均匀且不超过规范要求的安全系数作为约束条件。
对于离散的杆系结构,其弯曲应变能[20]可表示为
U=∑ m i=1 li 4EiIi (M2Li+M2Ri) (5)
式中:m为结构单元数量;li、Ei、Ii、MLi、MRi分别为单元长度、弹性模量、惯性矩及左右杆端弯矩值。
主塔的纵桥向位移平方和可表示為
D=∑ s i=1 δi2 (6)
式中:s为主塔控制节点数;δi为主塔各控制点处的纵桥向位移值。
约束条件表示为
1)关心截面应力:σjmax≥σj≥σjmin;
2)斜拉索索力:Tjmax≥Tj≥Tjmin;
3)斜拉索索力均匀度: Tj+1-Tj Tj+1 ≤Δ。
式中:σjmax、σjmin分别为截面j应力上下限,按规范取值;
Tjmax、Tjmin分别为第j根斜拉索索力上下限,在满足规范要求容许拉力小于0.4Tpd(破断索力)的前提下,考虑经济性和垂度效应建议Tjmax取0.32Tpd、Tjmin取0.15Tpd;Δ为相邻索力均匀度评价阀值。
2.3 数学模型
斜拉索索力优化数学模型可表示为
minf(x)=[minU(x),minD(x)]
s.t.gi(x)≤0,i=1,2…,n (7)
式中:f(x)为目标函数,包含结构弯曲应变能U(x)以及主塔纵桥向位移平方和D(x);g(x)为约束函数;n为约束个数。
2.4 基于MOPSO算法的索力优化
2.4.1 约束处理及更新策略
MOPSO算法迭代过程中的更新策略包含pbest更新(个体引导者更新)、gbest更新(全局引导者选择)以及外部储备集更新。笔者所考虑的索力优化问题是一个多目标多约束问题,在pbest更新策略上,采取约束占优的选择策略,具体按如下规则进行:
1)若粒子本次位置 x ki与 p best k-1i 为可行解(满足约束条件),则按Pareto占优准则:若 x ki为支配解,即fi( x ki)≤fj( p best k-1i)(j=1,…,n,n为目标函数数量),则 p best ki=kki,反之若 x ki为受支配解,即fj( x ki)≥fj( p best k-1j)(j=1,…,n),则 p best ki= p best k-1i;若互相不支配,则随机决定更新。
2)若粒子本次位置 x ki为可行解,而 p best k-1i为不可行解,则更新,反之,则不更新。
3)若 x ki与 p best k-1i均为不可行解,则按约束违反程度决定是否更新,具体规则为:若 x ki满足的约束条件数多于 p best k-1i ,则更新,反之,则不更新;若相等,则按Pareto占优准则处理约束, x ki 约束占优时更新,否则不更新。
MOPSO算法中,因外部储备集中的非劣解较多,如何从中选择gbest对算法的性能影响很大,为了维护粒子群的多样性,根据自适应网格法[21]计算外部储备集中各粒子的拥挤度,随机选择拥挤度较小的粒子作为全局引导者。为提高粒子群的多样性,同时让算法能够在一定的不可行域中搜索,提高算法的全局搜索能力,外部储备集更新策略将约束条件作为额外的目标函数考虑。具体按如下规则进行3轮筛选:
1)将各粒子本次迭代所得 p best ki 与储备集中的非劣解按Pareto占优准则比较,若 p best ki 为支配解或非劣解则添加到外部储备集中。
2)更新后的外部储备集中若存在受支配解,则将其剔除。
3)若外部储备集粒子数量超出上限,则按自适应网格法,将拥挤度较高的粒子随机剔除。
2.4.2 扰动处理
针对MOPSO算法优化过程中可能收敛到局部最优解的问题,按如下规则进行扰动,提高算法的全局搜索能力:
1)当外部储备集多次未更新时,即没有新的非劣解出现,对群里内粒子位置和速度重新进行随机生成。
2)在迭代过程中若某粒子移动到已经搜索过的位置时,对该粒子的位置和速度微调,避免重复计算。
3)每间隔一定迭代次数,对群体内随机10%的粒子位置和速度进行随机生成。
2.4.3 索力优化计算步骤
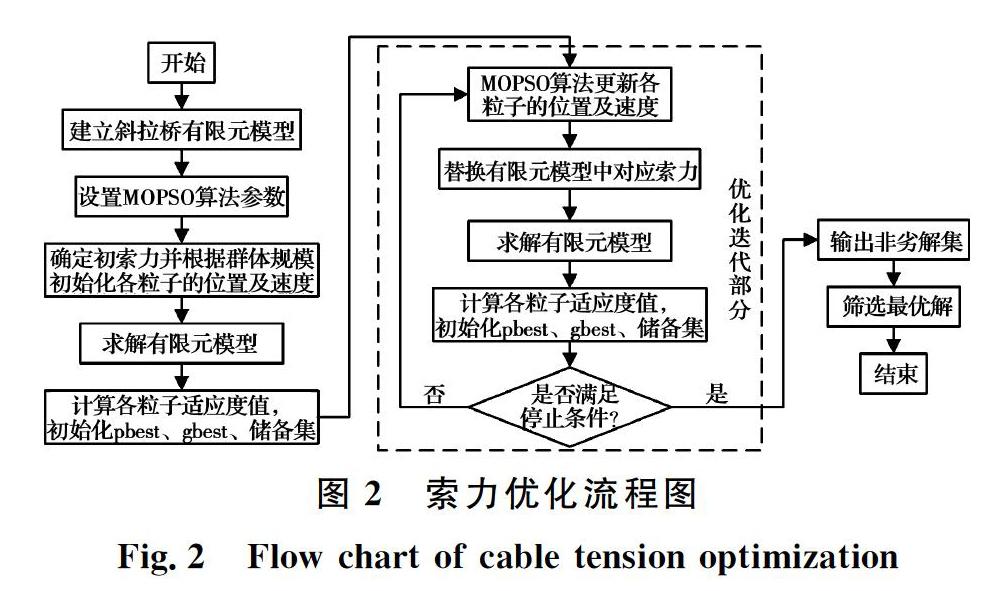
斜拉桥索力优化流程图如图2所示,具体计算步骤如下:
1)根据斜拉桥结构布置、截面尺寸及材料参数等建立考虑施工过程的全桥有限元模型,并确定设计变量数目;
2)设置MOPSO算法参数,包括加速度常数、惯性系数、种群规模、位置及速度限值、算法最大迭代次数等;
3)按恒载平衡法等方法确定一组初始索力,并根据这组索力初始化各粒子的位置和移动速度;
4)求解有限元模型,提取结构关心截面的应力、位移等计算结果;
5)根据确定的目标函数及有限元模型计算结果计算各粒子的适应度值,并初始化pbest、gbest、外部储备集;
6)根据MOPSO算法中的速度、位置更新公式对粒子的位置和速度进行更新,将更新后的粒子位置(索力)替换到有限元模型中;
7)重新求解有限元模型;
8)根据确定的目标函数及有限元模型计算结果计算各粒子的适应度值,据此更新pbest、gbest、外部储备集;
9)若满足停止迭代的条件则输出Pareto最优解集,并对其筛选得到最优解;若不满足停止迭代的条件则转入步骤6。
3 算例
3.1 工程概述
广东某不对称独塔双索面混合梁斜拉桥,跨径组合为66 m+69 m+260 m=395 m,边中跨比0.52,采用塔墩梁固结,边墩设纵向活动支座,桥面全宽40.5 m(双向八车道),主塔塔身总高142 m。主梁采用钢混结合,中跨247 m采用钢箱梁,其他部分采用预应力混凝土箱梁,梁高3.5 m。全桥共40对拉索。全桥总体布置、拉索编号、主塔截面及主梁截面如图3所示。
3.2 参数设置
该斜拉桥为不对称结构,选取全桥共40对斜拉索作为设计变量, X =(T1,T2,…,T40)T。MOPSO算法主要参数设置见表1,其中,惯性权重系数、c1和c2加速度常数采用Vandenbergh等[22]的推荐值。考虑到目前普遍使用的计算机配置,种群规模n取14,兼顾计算效率和算法性能。速度vid取值介于[-400,400],粒子位置xid限值在保证拉索安全系数的前提下,取初始索力上下浮动30%,即介于[0.7x0d,1.3x0d]。最大迭代次数设置为800次。
3.3 优化结果与分析
如何控制施工过程中主梁、主塔应力在安全范围内和成桥状态下的主塔线形是施工监控的两个关键问题。运用提出的斜拉索索力优化方法,采用Python编程语言联合有限元软件编写程序,对该桥的初始索力进行优化。表2为优化得到的Pareto最优解集,由表2可以看出,集合中的解均为可行解。对Pareto最优解集筛选,选择第1组解作为最优解。图4为优化后的初始索力,主跨斜拉索索力相對优化前变化幅度不大,但边跨大部分斜拉索索力相较优化前有10%左右提高,这说明优化前的边跨索力值偏小。根据斜拉桥布置,图4中B10斜拉附近设置有辅助墩,可以看出,此处索力值较相邻拉索更小。其主梁、主塔弯矩与优化前的对比分别如图5、图6、图7所示。由图5、图6可知:相较优化前,边跨混凝土梁的弯矩变化不大,但钢主梁部分的弯矩有明显改善,其弯矩极值由7.63×104 kN·m减小至4.95×104 kN·m,并且各截面弯矩分布均匀。 由图7可知,优化后的主塔弯矩极值明显降低,受力更合理,上塔柱最大弯矩由1.04×105 kN·m减小至7.11×104 kN·m,下塔柱弯矩极值由1.21×105 kN·m减小至5.77×104 kN·m。
3.4 与单目标PSO算法优化结果对比
将该算法中的目标函数仅选取主梁、主塔弯曲应变能之和,得到带约束的单目标PSO优化算法结果。MOPSO算法优化结果与之对比见表3。
由表3可知,虽然单目标PSO优化算法搜索到了更小的弯曲应变能,但没有照顾到主塔的成桥线形,其成桥塔偏值达到了53 mm,与MOPSO算法优化结果差别明显。由此说明了该方法相对单目标优化方法的优越性。
4 结论
基于MOPSO优化算法,考虑多优化目标函数和多约束条件,提出一种斜拉桥索力优化方法,确定了斜拉桥合理施工状态及合理成桥状态。以一座非对称混合梁独塔斜拉桥为例进行试算,得到如下结论:
1)MOPSO算法基于随机搜寻思想,对目标函数没有连续性、可导性等要求,在PSO算法的基础上,通过增加外部储备集保存迭代过程中出现的非劣解,采取适当的更新策略更新每次迭代中的个体引导者、全局引导者以及外部储备集来解决多目标索力优化问题。
2)在以结构塔梁弯曲应变能和主塔成桥线形为优化目标函数,以施工过程及成桥后结构处于安全状态和索力总体分布均匀作为约束条件的索力优化问题中,MOPSO算法搜寻得到的Pareto最优解集可供决策者进一步筛选,较仅考虑塔梁弯曲应变能的单目标PSO优化算法所得到的单一解更全面合理。
3)除了适用于斜拉桥成桥状态索力的确定外,该方法也适用于斜拉桥设计计算中可能出现的多次调索索力优化问题和梁拱组合体系吊杆的张拉力确定问题。
参考文献:
[1] SONG C L, XIAO R C,SUN B. Optimization of cable pre-tension forces in long-span cable-stayed bridges considering the counterweight [J]. Engineering Structures, 2018, 172:919-928.
[2] HASSAN M M, EL DAMATTY A A, NASSEF A O. Database for the optimum design of semi-fan composite cable-stayed bridges based on genetic algorithms [J]. Structure and Infrastructure Engineering, 2015, 11(8):1054-1068.
[3] HA M H, VU Q A, TRUONG V H. Optimum design of stay cables of steel cable-stayed bridges using nonlinear inelastic analysis and genetic algorithm [J]. Structures, 2018, 16:288-302.
[4] ASGARI B, OSMAN S A, ADNAN A. A new multiconstraint method for determining the optimal cable stresses in cable-stayed bridges [J]. The Scientific World Journal, 2014, 2014:1-9.
[5] 淡丹輝, 杨通. 基于影响矩阵及粒子群算法的斜拉桥自动调索[J]. 同济大学学报(自然科学版), 2013, 41(3):355-360.
DAN D H, YANG T. Automatic cableforce adjustment for cable stayed bridge based on influence matrix and particle swarm optimization algorithm [J]. Journal of Tongji University(Natural Science), 2013, 41(3):355-360. (in Chinese)
[6] 张勇, 巩敦卫. 先进多目标粒子群优化理论及其应用[M]. 北京:科学出版社, 2016:6-12.
ZHANG Y, GONG D W. Advanced multi-objective particle swarm optimization theory and its application[M]. Beijing:Science Press, 2016:6-12. (in Chinese)
[7] 刘益铭, 刘大洋, 刘山洪. 基于MATLAB联合ANSYS的斜拉桥恒载索力优化[J]. 重庆交通大学学报(自然科学版), 2013, 32(6):1111-1114, 1194.
LIU Y M, LIU D Y, LIU S H. Optimization of cable forces of cable-stayed bridges based on MATLAB and ANSYS software under dead loads [J]. Journal of Chongqing Jiaotong University(Natural Science), 2013, 32(6):1111-1114, 1194. (in Chinese)
[8] 朱敏, 刘荣桂, 谢桂华, 等. 基于多种群遗传算法的大跨度斜拉桥索力优化[J]. 世界桥梁, 2016, 44(3):38-42.
ZHU M, LIU R G, XIE G H, et al. Cable force optimization for long-span cable-stayedbridge based on multi-population genetic algorithm [J]. World Bridges, 2016, 44(3):38-42. (in Chinese)
[9] 吴霄, 肖汝诚. 基于遗传算法的大跨度混合梁斜拉桥索力优化[J]. 江苏大学学报(自然科学版), 2014, 35(6):722-726.
WU X, XIAO R C. Optimization of cable force for cable-stayed bridges with mixed stiffening girders based on genetic algorithm [J]. Journal of Jiangsu University(Natural Science Edition), 2014, 35(6):722-726. (in Chinese)
[10] 李鸿波, 祝孝成. 基于量子粒子群算法的矮塔斜拉桥索力优化[J]. 公路交通科技(应用技术版), 2017, 13 (8):231-235.
LI H B, ZHU X C. Cable force optimization for low-pylon cable-stayed bridge based on QPSO algorithm[J]. Journal of Highway and Transportation Research and Development(Application Technology Edition), 2017, 13 (8):231-235. (in Chinese)
[11] 陈志军, 刘洋, 杨立飞, 等. 基于粒子群优化算法的独塔斜拉桥成桥索力优化[J]. 桥梁建设, 2016, 46(3):40-44.
CHEN Z J, LIU Y, YANG L F, et al. Optimization of stay cable tension of completed bridge of single-pylon cable-stayed bridge based on particle swarm optimization algorithm [J]. Bridge Construction, 2016, 46(3):40-44. (in Chinese)
