风力发电机组对风偏差检测算法研究与应用
2020-05-19田春华刘家扬崔鹏飞
李 闯, 田春华, 刘家扬, 崔鹏飞, 蒋 伟
(北京工业大数据创新中心有限公司, 北京 100083)
0 前言
风电机组对风偏差是由于风向标安装误差、电器测量、尾流影响等因素造成的机组对风偏差。偏航对风偏差会造成机组发电效率降低, 当对风偏差为10°时,机组发电功率约降低4.5%[1]。 另一方面,当出现偏航偏差时,机组将受到单侧偏离主轴轴向的作用力, 该作用力将使主轴轻微偏离中心轴,形成大风机械振动。 如此长期运行,会造成主轴磨损、 齿轮箱齿面磨损、 机组对中位移等问题,严重影响机组寿命。 因此,定期排查风电机组对风偏差,及时对偏差进行矫正,不仅能够提升机组发电性能,提高风电场发电量,还能减少大部件磨损,延长机组使用寿命。
风电机组叶轮在正对风时, 风能的吸收效率达到最高, 大型机组通常采用主动偏航控制系统来保证机组对风(图1)。
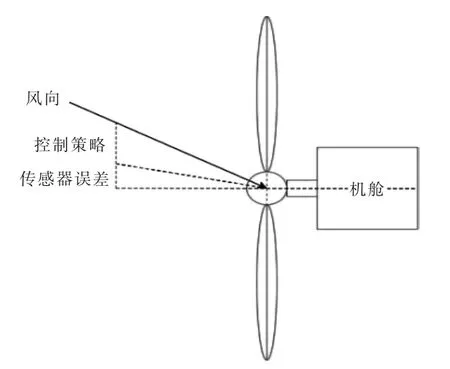
图1 风电机组对风偏差示意图Fig.1 Principle of yaw error of wind turbine
偏航对风偏差按照成因不同, 分为静态偏差和动态偏差。静态偏差由风向标固定安装、电气测量和扰流影响造成。 动态偏差由风湍流和偏航系统响应延迟造成。 本文提出的对风偏差检测算法仅用于机组的静态偏差测算。
目前, 有关偏航的研究主要集中在偏航系统控制策略领域[2],[3],且均是假定传感器测量结果的统计均值是准确的, 未对传感器本身存在偏差的问题做检测优化。 文献[4]提出对发电功率和偏航对风角度进行拟合, 把拟合曲线的极大值对应的角度作为对风偏差,但并未说明具体的拟合算法。
针对上述问题, 本文首先提出基于分位数拟合的对风偏差算法, 给出算法步骤的详细描述以及在河北某风场的应用效果;其次,给出算法应用系统的功能设计, 包括偏航对风偏差应用的具体功能和系统的整体流程框架。
1 对风偏差检测算法
1.1 算法原理
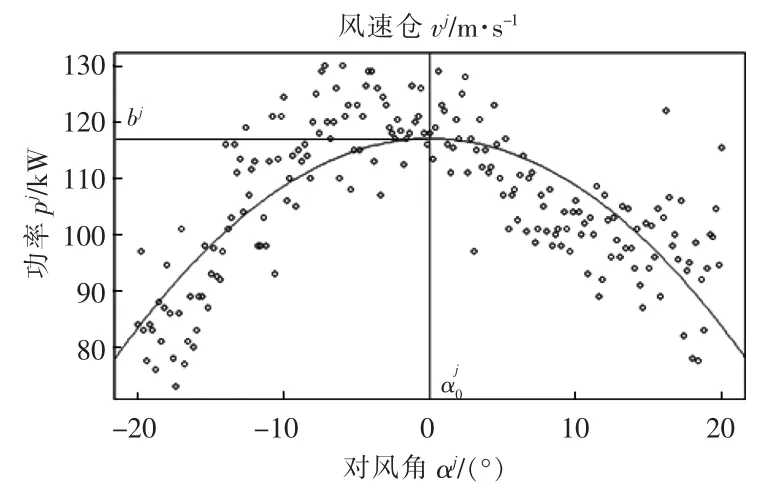
偏航对风是否存在偏差主要体现在相同风速下,对风角-功率曲线极大值点的偏移量(图2)。由图2 可知:正对风时,如图中实线,极大值中心线靠近0°对风角;正偏和负偏分别对应右侧和左侧的虚线。 因此,只要搜集足量数据,在很小的风速区间内(近似认为风速不变),拟合出对风角-功率曲线,然后找出功率最大值对应的对风角度,即是所求对风偏差。
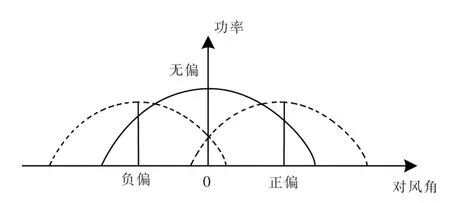
图2 偏航偏差与对风角-功率曲线极大值的对应关系Fig.2 The correspondence between yaw error and maximum of relative wind direction-power curve
实际执行拟合时,因尾流效应和随机波动,给风速测量值带来不平稳噪声,因此,需要拟合算法具备很强的鲁棒性。 本文引入分位数回归进行曲线拟合[5],[6],相比于 OLS(Ordinary Least Square)算法,分位数回归放松了模型随机误差0 均值、同方差的假设,并具有缺失值不敏感的特点,能更加精确地描述自变量对因变量的变化范围。 假设随机变量的分布函数为

Y 的 τ 分位数的定义为

对于 Y 的一组随机样本{y1,y2,…,yn},ξ 为模型预测值,分位数回归要满足:
式中:ρτ(u)=[τ- I (u<0) ]。
I(z)为指示函数,即 z 为真时 I(z)=1,否则为 0。
若Y 由k 个自变量线性表示:

则参数估计问题可转换为

该问题的参数估计方法采用内点算法[7]。 中位数回归是分位数回归算法的特例,即τ=0.5,本文使用中位数回归进行对风偏差问题求解。
1.2 算法流程
风电机组对风偏差算法, 基于机组运行SCADA 数据,以单台机组为颗粒度执行,具体分为五步。
第一步:单台机组数据获取。
搜集机组SCADA 运行数据和机组保障功率曲线。
①运行数据:选取最近1~3 个月的SCADA 数据,时间粒度在秒级到分钟级,用于保证后续步骤有足够的数据进行统计分析。时间颗粒度越细,选定的数据时间范围可以越小。 数据字段包括:时间、对风角度、风速、功率、桨距角、机组运行状态(包括运行、停机、限电等)。
②理论功率曲线: 机组生产厂家给出的担保功率曲线。
第二步:数据预处理。
包括零方差数据删除和风速平滑。
①数据异常原因主要包括: 机组运行状态异常,如停机、限功率;数据采集异常,如风速仪结冰,连续多点数值不变等。
停机异常易于判断, 但降功率异常或小风速高功率异常,则需要借助理论功率曲线完成。具体方法是, 过滤与理论功率曲线功率相对误差绝对值大于某阈值的点, 设过滤前风速功率散点为(vi,pi), 使用机组理论功率曲线样条内插值得到的对应点为(vi,p′i),则过滤条件为
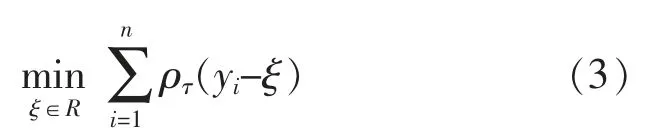
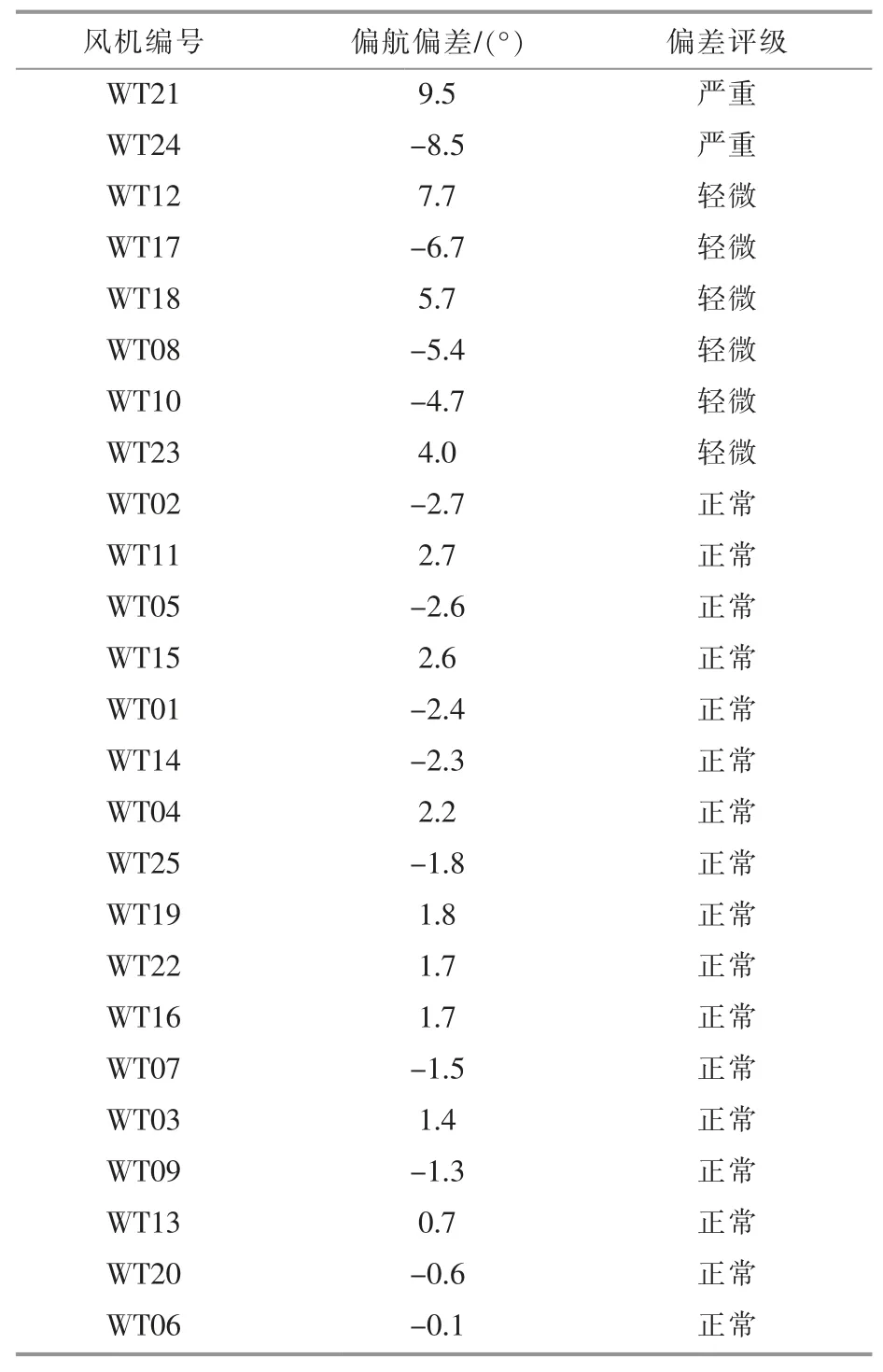
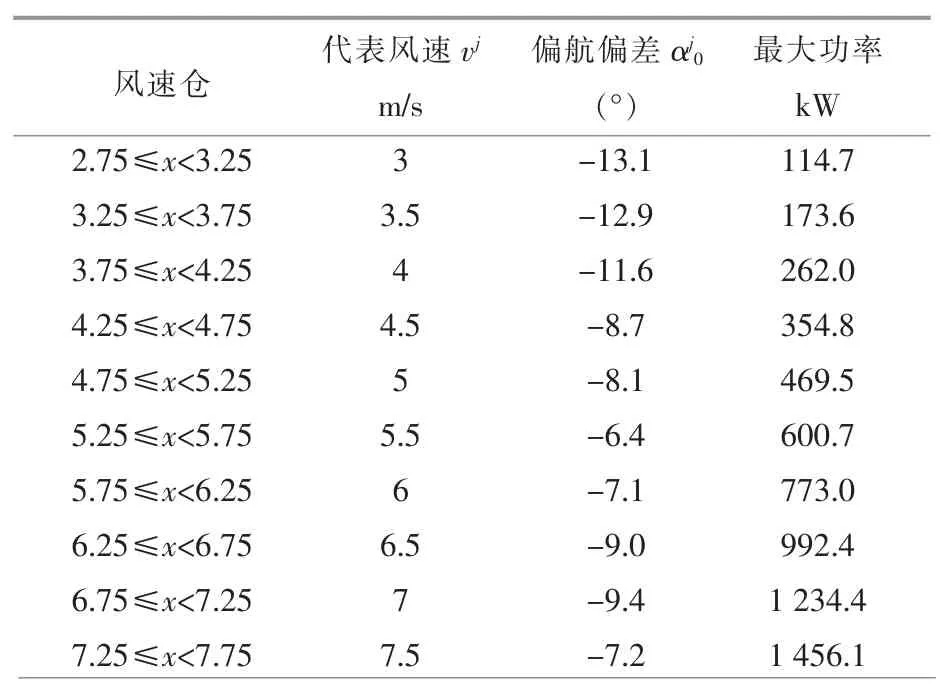
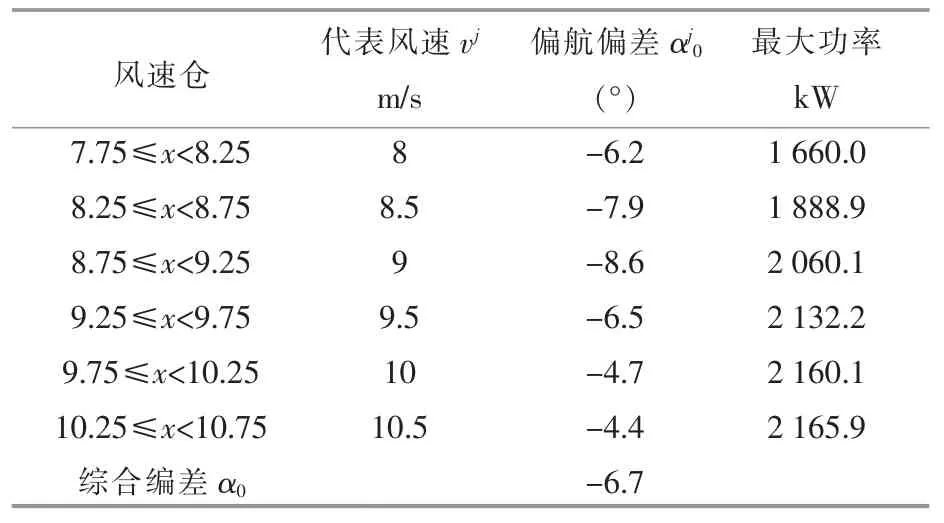
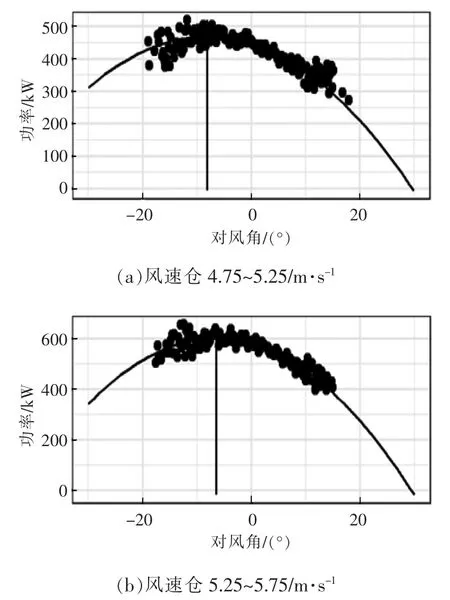
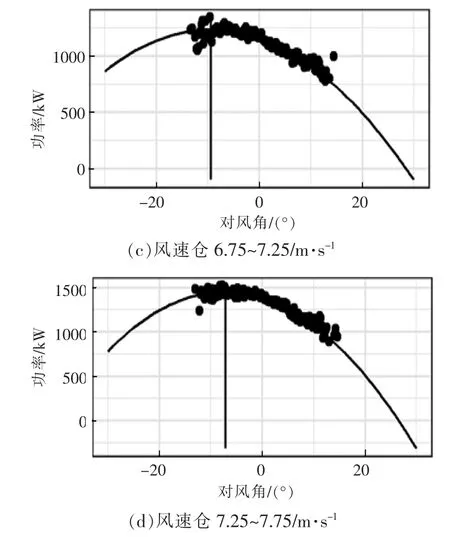
式中:T 为滤波阈值,通常0 ②风速平滑采用指数平滑法, 对风速进行过滤,平滑因子的取值为0.1~0.4。 第三步:风速分仓。 按照风速把数据集划分成若干风速仓, 分仓过程分为两步。 ①曲线爬坡段选取: 为了避免桨距角变化对功率的影响,仅选取功率爬坡阶段的散点,选取从切入风速vin到额定风速vr之间的数据, 通常在3~8 m/s。 此阶段桨距角不变,且保持最大风能吸收。 ②风速仓划分:在[vin,vr]之间,以 w 为间隔,将风速划分成M 个连续的数据仓[vin-w/2,vin+w/2],[vin+w/2,vin+3w/2],…,[vin+(2M-3)w/2,vin+(2M-1)w/2],并取第j 个风速仓的代表风速vj为仓边界均值,风速仓中的第i 个数据点为其中 α 为对风角度。为了满足舱内数据风速不变的假设,风速仓宽度w 理论上越小越好,但分仓数目太多会导致落在每个仓内的数据变得过少, 不利于检测算法计算,通常0.1≤w≤0.5。 第四步:回归模型建立。 为找到风速仓内最大功率对应的对风角度,需对风速仓内的数据进行回归。 本文采用中位数回归算法进行回归,这里选用抛物线为模型结构,则风速仓vj内所有的拟合模型定义为 绘制式(2)的示意曲线(图3),正常情况下,kj<0 抛物线开口向下,bj是功率最高值,与之对应的就是要求解的对风偏差。 图3 对风角功率拟合曲线Fig.3 Fitting curve of relation between relative wind direction and power 第五步:对风偏差计算。 权重的选取考虑了风速与功率之间的非线性关系,风速越高贡献越大。 以河北某风电场25 台2 MW 机组为例,取2018 年12 月数据进行对风偏差测算, 该风场的SCADA 数据为7 s 间隔, 机组切入风速为3 m/s,额定风速为10.5 m/s,设定风速仓大小w=0.5 m/s。风场25 台机组测算的对风偏差结果如表1 所示。其中2 台机组对风偏差绝对值大于8°,评级为严重偏差;6 台机组介于4~8°,评级为轻微偏差;17台机组小于4°,评级为正常。 以WT17 机组为例,根据切入风速、额定风速和w,划分出16 个风速仓,在每个风速仓计算出风速仓偏差结果,最后由式(3)计算综合偏差α0=-6.7 °(表 2)。 进 一 步 取 WT17 机 组 vj为5,5.5,7,7.5 m/s 的 4 个风速仓,绘制对风角-功率拟合曲线(图4)。 由图4 可知,拟合曲线较好地反映了功率随对风角的变化,且在4 个风速仓中,对风偏差计算结果较为一致,均为-8°左右。 表1 风电场25 台机组对风偏差测算结果Table 1 Yaw error detection results of 25 turbines in one wind farm 表2 WT17 号机组对风偏差测试结果Table 2 Yaw error detection results of turbine WT17 续表2 图4 WT17 机组在4 个风速仓内的对风角-功率拟合结果Fig.4 Fitting results of relative wind direction - power curve of WT17 within 4 wind speed bins 基于对风偏差检测算法, 设计了风电场偏航对风监测应用,包括风电场监测画面,对风偏差、损失电量历史统计画面,用户权限管理功能,帮助用户发现偏航偏差问题和相关电量损失。 图5 对风偏差应用系统框图Fig.5 Framework of application system of yaw error detection results 在对风偏差监测应用基础上, 本文设计的算法应用系统框架如图5 所示。 应用系统包括采集计算前端和对风偏差监测应用两部分。 采集计算前端位于风电场一区,负责采集机组数据和偏航对风控制参数调整 (需要计算前端与机组主控系统对接)。对风偏差监测应用位于安全三区或互联网区的远程集控中心, 它一方面接收计算前端发来的机组运行数据,一方面以周为时间窗口,滚动评价所辖区内全体机组的对风偏差情况。 如果偏差大于8°(严重偏差可能是数据采集或检测算法问题), 则通过给资产管理系统发送维修工单,让现场检修人员维修确认;如果偏差小于8°,则将偏差调节指令下达至采集计算前端, 通过机组控制参数调整修正对风偏差。通过上述流程,实现机组对风偏差矫正的闭环落地。 本文针对风电机组偏航对风偏差问题, 提出了基于分位数拟合的偏航对风算法, 并在河北某风电场进行测算, 发现严重偏差2 台, 经现场核验,这2 台机组确实存在风向标对风不正问题,验证了算法的有效性。 基于检测算法开发了偏航对风偏差监测应用系统,设计了应用系统整体框架,实现了系统的检测算法的闭环落地。 本文的检测算法仅考虑了风速因素, 对于地形复杂风场, 入流角或湍流影响会造成不同风向下偏航对风偏差的不同,此外,温度、湿度也会影响对风偏差。因此,下一步,应加入扇区、环境等因素进行对风偏差分析。
1.3 测试效果
2 应用系统设计

3 结论