基于红外热成像的生命探测飞行器设计与实现
2020-05-18江俊许森叶芳芳
江俊 许森 叶芳芳


摘 要:随着红外热成像以及无人机技术日益成熟并被广泛用于电力预防检测、工业测温、制程控制、医療检疫等领域。文章将红外热成像技术以及无人机技术进行交叉融合,设计开发一款基于红外热成像的生命探测飞行器。该飞行器不仅具备定高自稳,垂直升降等四轴飞行器一般特性,还能够通过红外热成像技术进行生命探测,并对探测数据的筛选分析实现远程报警,帮助特种人员完成在黑暗以及其他复杂环境中的实施快速搜查和救援工作。
关键词:红外热成像;四旋翼飞行器;433 MHz通信;动态规划
中图分类号:TP391;TN219 文献标识码:A 文章编号:2096-4706(2020)20-0026-05
Design and Implementation of Life Detection Vehicle Based on
Infrared Thermal Imaging
JIANG Jun,XU Sen,YE Fangfang
(College of Information Science and Technology,Zhejiang Shuren University,Hangzhou 310015,China)
Abstract:With the increasing maturity of infrared thermal imaging and UVA technology,it is widely used in power prevention and detection,industrial temperature measurement,producing quality control,medical quarantine and other fields. In this paper,infrared thermal imaging technology and UAV technology are combined to design and develop a life detection vehicle based on infrared thermal imaging. The aircraft not only has the general characteristics of quadcopter,such as fixed height and self-stabilization,vertical lifting and so on,but also can carry out life detection through infrared thermal imaging technology,realize remote alarm through screening and analysis of detection data,and help special personnel to complete the rapid search and rescue work in the dark and other complex environments.
Keywords:infrared thermal imaging;quadrotor;433 MHz communication;dynamic programming
0 引 言
近年来,世界各地自然灾害频发,搜救机器人的应用场合日益增多,世界各国均投入大量资源开始研制开发各种救援机器人。多旋翼无人机由于其机动性强,机身轻巧等特点受到人们广泛关注,被大量投入军事侦察、地区反恐、核生化信息检测、抢险救灾、安全防护等领域[1]。基于红外热成像的生命探测飞行器是无人机控制技术和红外技术融合应用[2],针对特殊环境下搜救人员视野受限的问题,通过高速率的数据流传输将实时图像传输至地面站,给搜救及观测人员提供灾难现场清晰、全局的视角图像[3,4]。浙江树人大学信息科技学院一直致力于通信与电子前沿技术的研究和应用转化,本研究与应用不仅沿袭学院的研究方向且有较好的研究基础,同时具有浙江省自然科学基金等支持。本文研究的生命探测亦是灾情场景重建研究后的目标延伸和拓展,同时,作者在该研究项目中既考虑到总体和硬件的设计方案,也实现了软件设计和图像算法。因此,本研究的应用可有效减少复杂环境给救援行动带来的负面影响,能为救援队伍争取宝贵的搜救时间。
1 飞行器控制系统设计方案
生命探测飞行器控制系统设计和实现是本研究应用的核心内容。系统主要有解决飞行器飞行姿态、高度、路径控制、图像和控制信号传输等功能,主要包括飞行器控制模块、通信模块等。生命探测飞行器控制系统整体设计方案如图1所示,包含飞行器控制模块、通信模块(包含通信模块A、通信模块B)、红外热成像模块等。其中飞行器控制模块传感器部分测得的数据进行姿态解算,确保稳定姿态飞行。地面飞行器控制模块通过通信模块B发送控制信号,操控飞行器按照一定的姿态及路径飞行。生命探测飞行器上搭载的红外热成像模块则进行图像信号采集并通过通信模块A将数据传送给通信基站模块A,通信基站模块A通过串口将接收图像传输给PC机。同时,飞行器上运行生命体检测的图像算法,当检测到生命体时,飞行器上触发报警装置,并帮助搜救人员定位目标。观测和搜救人员也可以通过PC机获得实时图像,用于目标和环境的观测。
1.1 飞行器控制模块设计方案
飞行器控制模块由控制部分和传感器部分组成。传感器部分用作感知飞行器的运动状态及空间位置,主要有加速度计(G-sensors),陀螺仪(Gyros),电子罗盘(E-Compasses),压力传感器(Barometers)几个部分组成。通过加速器可感测线性加速度与倾斜角度,单一或多轴加速器可感应结合线性与重力加速度的幅度与方向;陀螺仪可感知一轴或多轴的旋转角速度,精准感测自由空间中的复杂移动动作,在飞行器上这两者的配合使用可获得姿态解析数据。电子罗盘也称为磁力计,磁阻传感器是电子罗盘的核心,通过感知地球磁场的方向从而获得飞行器姿态和前进方向;压力传感器,也叫气压计,可以通过测量压力值来感知飞行器的绝对高度。将电子罗盘和气压计运用在飞行器控制模块中可确定飞行器当前的位置状态。
1.2 通信模块设计方案
考虑到此设计的应用场景,需要通信模块具备支持長距离,强穿透,中等传输速率以及数据连续传输等特点。综合考量,通信模块的数据传输通信方案采用433 MHz模块来实现。通信模块中除了热成像图的数据传输,还涉及到飞行器的控制信号数据传输。433 MHz通信模块可在2.5~168 kB/s速率下实现长距离数据连续传输,且具有较强的穿透能力。由于快速移动的装置来说,控制信号的无线传输需要具备实时性高,抗干扰能力强的特性。且在天线增益5 dBi的条件下具有高达1 500 m的传输距离。模块具有RSSI模式、连传模式等七种模式,且在连传模式下支持不限数据包大小的UART无线透传,传输速率可达2.5 kbps。
2 硬件电路设计
2.1 飞行器控制模块主电路
飞行器控制模块采用STM32F103T8U6作为控制器芯片。控制模块主电路即为控制芯片电路,包括复位电路、外部时钟电路、启动模式选择电路、电源去耦电路等。本文只介绍较为重要的外部时钟电路和复位电路。复位操作采用低电平复位,延时复位电路由电容串联电阻构成,当复位引脚处于低电平时,可以通过调节阻容值决定引脚恢复高电平时间。设计中采用常用的10 kΩ电阻加2.2 μF电容构成RC电路,低电平时间持续为两个机器周期以上。外部时钟采用的是8 MHz无源晶振,单片机内部通过锁相环(Phase Locked Loop,PLL)使得系统时钟最高可达到72 MHz。为方便调试,将SWD在线调试接口引出,如图2所示控制模块主电路所示。
2.2 飞行器控制模块传感器部分电路
飞行器控制传感器部分主要包括加速度计、陀螺仪、电子罗盘、气压计电路。加速度计、陀螺仪MPU6050的芯片电路主要是设计引脚的输入输出电路的设计和电源的滤波处理。电源引脚VDD处配置两个2.2 μF的滤波电容进行电源滤波。同时,用于与飞行器控制模块主电路之间的I2C通信的SDA引脚和SCL引脚,配置两个3 kΩ的上拉电阻,提供稳定电流。为校准滤波连线的REGOUT引脚,配置0.1 μF的接地电容用于滤波,具体如图3(a)所示。
电子罗盘电路HMC5883主要设计内容有两部分。第一,其信号通信是通过加速度计、陀螺仪MPU6050的从属I2C总线(AUXDA,AUXDI)连接到主芯片电路上。因此,在初始化MPU6050时,设置成主I2C总线与从属I2C总线直通,主芯片电路可以直接通过主I2C总线访问并读取电子罗盘器HMC5883信号数据。第二,STEP引脚为置位、复位引脚,将配置一个220 nF电容并连接SETC引脚,用于滤波和防干扰抖动。同时,C1引脚配置一个4.7 μF接地电容用于滤波,具体如图3(b)所示。气压计电路FBM320的电路较为简单,只需注意I2C接口同加速度计、陀螺仪MPU6050一样需要上拉电阻,具体如图3(c)所示。
2.3 通信模块
本设计通信模块分别传输热成像数据和控制信号。对于负责热成像数据传输的433 MHz无线模块,包含板载通信模块和通信基站模块。板载通信模块即装配在飞行器机身上的通信模块A(如图1所示),通过设计M0、M1、M3三个引脚的电平将通信模块模式固定为无线透传,将控制器芯片引脚RX,TX连接至通信模块和热成像模块,用于热成像数据的传输和分析。模块搭配LED用作显示433 MHz无线模块工作状态,如图4(a)所示。控制信号电路相比热成像数据传输模块较为复杂,主要体现在附加的晶振电路和射频电路。控制信号模块采用16 MHz无源晶振作为晶振输入,实现晶体震荡器功耗和快速启动。射频电路方面,通过网络匹配使用负载阻抗为15 Ω+j88 Ω。同时,为了消除其他信号源以及杂波对通信电路的影响,还配备了去耦电容,如图4(b)所示。
3 飞行器系统软件设计
3.1 飞行器嵌入式系统软件
飞行器嵌入式系统软件运行后,先采集飞行器升空前的地面气压和初始温度,然后在飞行中实时采集气压和温度,通过对实时气压和初始气压数据相减及转换,获得相对高度,可供建模求取物体真实面积时使用。初始温度和实时温度作为参数代入预设公式计算温度阈值。获得温度阈值后,对红外传感器获得的数据进行处理,统计获得对应传感器中显示的生命体的个数及面积。通过模型公式将二维成像面积转换获得实际的物体二维投影面积,然后与预设的可判断为目标生命体的面积大小做比较。若符合面积相匹配,则触发飞行器检测到生命体的报警,若不匹配继续采集实时气压和温度,准备下一帧数据的处理,流程图如图5所示。
3.2 生命体判别算法实现
生命体判别算法的实现分为温度阈值计算,物体二维面积计算两个部分组成。首先,根据飞行器高度以及环境温度,拟合出一个温度阈值,作为判断红外传感器获取某像素点的温度数据是否可认作为生命体温度数据的依据。然后,根据算法统计红外传感器一帧画面中存在的高于温度阈值的像素块数量,及每个像素块的大小。最后,对物体面积与距离关系进行建模,根据像素块大小及飞行器距离地面高度来计算物体的真实面积大小,以判断是否为生命体。
温度阈值是在红外传感器显示图像中为区别环境背景和生命体的一个温度值,由于飞行器运作高度以及外界环境条件的变化,红外传感器测量的温度值会产生误差。为了在保证此系统的实时性能的前提下减少由红外传感器误差带来的影响,程序不直接对测得数据进行修改,而是通过修改区别环境背景与生命体的温度阈值来提高生命体判别算法的准确度,因此在本系统中温度阈值是一个随时间变化的一个数值。利用多项式拟合进行温度阈值与距离的数据关系分析,得到模型公式为:
f(x)=P1×x4+P2×x3+P3×x2+P4×x+P5
其中,P1=3.955e-07,P2=-8.475e-05,P3=0.005 45,P4=-0.171 80,P5=36.990 00温度阈值与距离的曲线拟合关系如图6所示。
在获取动态的温度阈值后,需要对显示图像内高于温度阈值的像素块进行统计,以获取显示物体大小。为区分出生命体在显示图像内的个体面积,算法没有直接统计所有高于温度阈值的像素点数量作为生命体的成像面积,而是通过二维动态规划和无向图模型,忽略孤立或过小像素,进行疑似生命体的有效像素遍历与統计。
4 生命体判别算法准确度测试
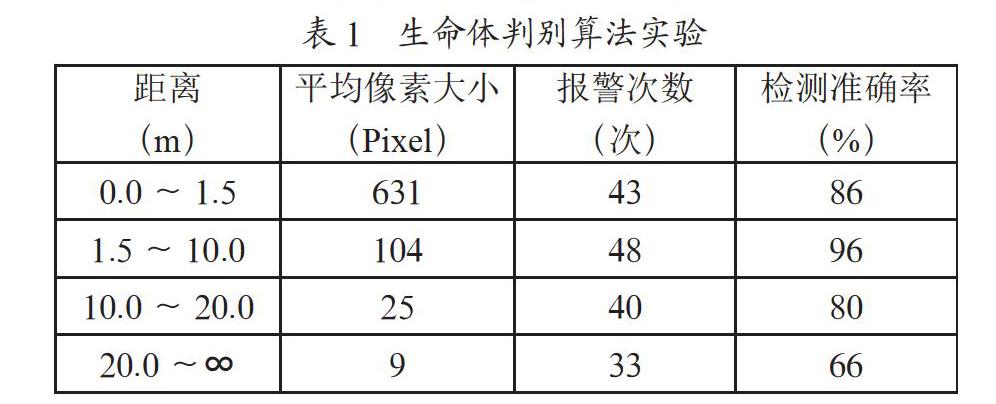
基于红外热成像的生命探测飞行器如图7所示。本文通过实验测试检测生命体判别算法的准确度,测试变量为在30摄氏度环境中,人距离红外摄像头的距离,每个距离实验次数为50次,数值取平均值,如表1所示。
测试结果分析:生命体判别算法在0.0 m到1.5 m的距离内中,由于挑选的红外热成像镜头广角不足,不能把人体全身映射进传感器使得部分面积缺失,导致计算的真实面积大小小于报警阈值,报警情况不太理想,可通过改变镜头提高准确率。生命体判别算法在1 m到10 m之间准确率较高,当大于20 m时,受红外热成像模块分辨率等因素影响,视野内测得的高于温度阈值的像素点个数降到个位数以下,判别准确率下降,效果不太理想。
5 结 论
基于红外热成像的生命探测飞行器能够在一定的距离范围内进行较为准确的生命探测,并实现远程监测和报警,有助于特种人员实现复杂环境中的快速搜查和救援工作,在此次设计中基本达到了预期目标。由于受到飞行器硬件以及热成像仪模块的限制,有效探测距离和算法准确度有待进一步提高。
参考文献:
[1] 左天丞.四旋翼飞行器低空飞行避障系统的设计 [D].哈尔滨:哈尔滨理工大学,2019.
[2] GONG W G,WEN K,HE L F,et al. Human and Nonhuman Recognition Using Pyroelectric Infrared Detector [J]. International Journal of Thermophysics,2012,33(10-11):2237-2241.
[3] 赵灿.室外自主搜救飞行机器人的设计与实现 [D].绵阳:西南科技大学,2017.
[4] 周渝人.红外与可见光图像融合算法研究 [D].长春:中国科学院研究生院(长春光学精密机械与物理研究所),2014.
作者简介:江俊(1983—),男,汉族,浙江杭州人,讲师,博士,主要研究方向:模式识别、图像处理与大数据处理等;许森(1982—),男,汉族,湖北荆门人,讲师,硕士,主要研究方向:集成电路与集成系统设计、数字信号处理等;叶芳芳(1980—),女,汉族,安徽桐城人,讲师,博士,主要研究方向:图像处理、深度神经网络等。
